Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Brain Computer Interfaces Tutor: Prof. Rodrigo Ventura Alunos: Francisco Guerra - 69874 André Pinheiro - 68866 Sara Pestana - 65126

2
Índice Tema Arquitectura do BCI Aplicações Perspectivas futuras Conclusão Bibliografia

4
Arquitectura do BCI

5
Aquisição e processamento de sinais Técnica invasiva Técnica semi-invasiva Técnica não invasiva

6
Técnicas não invasivas Eléctrodos são colocados sob o couro cabeludo → Vantagem Fraca resolução do sinal captado → Desvantagem Ex: EEG (Electroencefalograma)
")
7
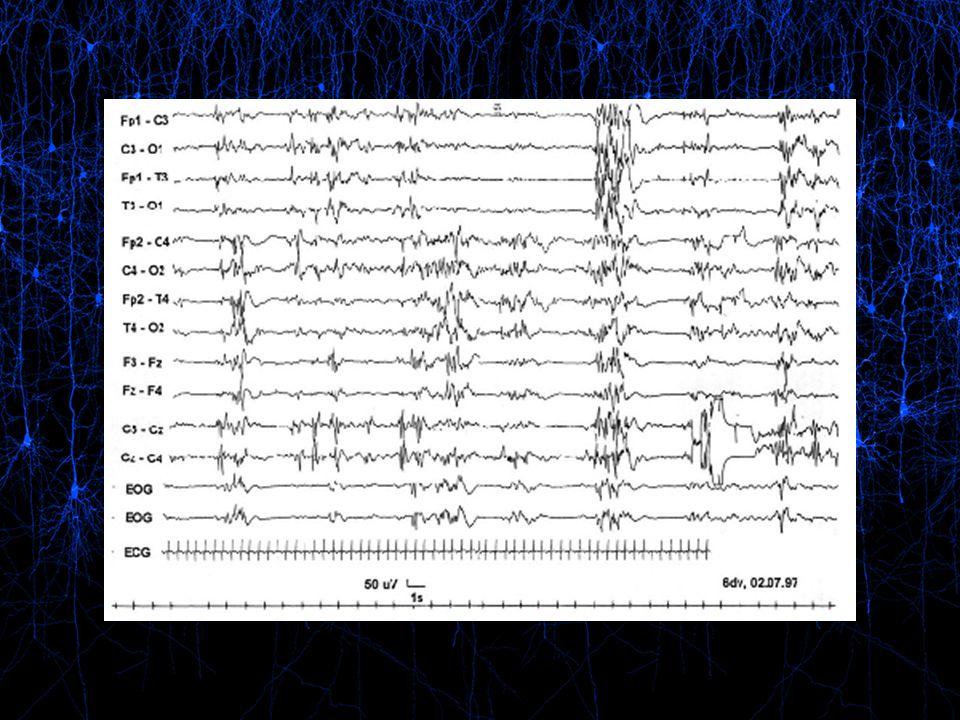
EEG (Electroencefalograma) Boa resolução temporal Facilidade de uso Baixo custo de instalação É susceptível a interferências É necessário um treino extenso que permita trabalhar com a tecnologia
 Boa resolução temporal Facilidade de uso Baixo custo de instalação É susceptível a interferências É necessário um treino extenso que permita trabalhar com a tecnologia")
9
Tipos de ondas medidas

10
Tipos de Ondas(II) Delta - sono profundo Theta - associadas à inibição de respostas ilicitas Alpha - fechar os olhos e inibição de respostas Beta - actividade, pensamento ansioso e concentração activa Mu – mostra o estado de repouso dos neurónios motores
 Delta - sono profundo Theta - associadas à inibição de respostas ilicitas Alpha - fechar os olhos e inibição de respostas Beta - actividade, pensamento ansioso e concentração activa Mu – mostra o estado de repouso dos neurónios motores")
11
Potenciais estudados P300 SCP (slow cortical potentials) SMR (Sensorimotor Rhythm)
 SMR (Sensorimotor Rhythm)")
12
P300

13
pP300 BCI System

14
SCP Alterações lentas de tensões geradas no córtex O,5-10 s SCP positivo - funções que envolvem activação cortical (ex: movimento) SCP negativo – redução da activação cortical
 SCP negativo – redução da activação cortical")
15
SCP in BCI Pessoas com treino conseguem controlar SCPs para produzir trocas positivas ou negativas Pode se usar este controlo para executar um básico processamento de palavras ou outras tarefas de controlo como aceder à internet Pessoas inválidas podem usar este controlo para comunicar

16
SMR A- Espectro que mostra estimulação motora no cérebro; B- Espectro que mostra o pensamento no movimento; C- Gráfico que mostra dessincronização da actividade rítmica causada pelo pensamento no movimento ou pelo movimento; D- Gráfico que mostra sincronização da actividade rítmica causada pela falta de estimulação motora no cérebro.

17
SMR no BCI Pessoas podem controlar amplitudes de ritmos mu ou beta Pode-se usar este controlo para mover um cursor ou para operar um simples aparelho ortopédico (ex: braço robótico) Também suporta o processamento básico de palavras ou outras funções simples
 Também suporta o processamento básico de palavras ou outras funções simples")
18
Neurofeedback

19
Neurofeedback(ii) Tipo de biofeedback que tem por objectivo controlar a actividade do sistema nervoso central Usa EEG para ilustrar a actividade cerebral Treinar sujeitos para conseguirem modular parâmetros de EEG (ex:P300, SMR,SCP)
 Tipo de biofeedback que tem por objectivo controlar a actividade do sistema nervoso central Usa EEG para ilustrar a actividade cerebral Treinar sujeitos para conseguirem modular parâmetros de EEG (ex:P300, SMR,SCP)")
20
Arquitectura do BCI Interpretação de dados Utilização de modelos matemáticos através de algoritmos computacionais Codificação dos sinais biológicos de forma a poderem ser utilizados a nível electrónico conforme a sua posterior aplicação.

21
Arquitectura do BCI Output do sinal Dispositivos de saída Unidireccionais Neurofeedback

22
Aplicações Tratamento de pacientes Após AVC Hiperactividade Monitorização: e.g. apnéia do sono

23
Aplicações Desenvolvimento de utensílios Cadeira de rodas com navegação autónoma Robôs teleoperados

24
Aplicações Outros Estudo do cérebro Aperfeiçoamento de capacidades Indústria videojogos

25
Perspectivas futuras Optimização das técnicas de leitura dos sinais do córtex cerebral Algoritmos computacionais mais eficientes

26
Conclusão

27
Sites http://medibrain.pt/pagina5.asp http://nitrolab.engr.wisc.edu/bci/overview.php http://martaneurofeedback.wordpress.com/ http://www.tslab.ssvl.kth.se/thesis/node/1012 http://www.bci2000.org/wiki/index.php/User_Tutorial:Mu_Rhythm_BCI_Tutorial Artigos Científicos Wolpaw, J. R.; Birbaumer, Niels; McFarland, Dennis J.; Pfurtscheller, Gert; Vaughan, Theresa M.; Brain–computer interfaces for communication and control; Clinical Neurophysiology 113 (2002) 767–791; 2March, 2002 Gerven, Marcel van; Farquhar, Jason; Schaefer, Rebecca; Vlek, Rutger; Geuze, Jeroen; Nijholt, Anton; Ramsey, Nick; Haselager, Pim; Vuurpijl, Louis; Gielen, Stan; Desain, Peter; The brain–computer interface cycle;.Neural Eng. 6 (2009) 041001 (10pp); 2009 Escolano, C.; Antelis, J.; Minguez, J.; “Human Brain-Teleoperated Robot between Remote Places”; Kobe, Japan; May 12- 17, 2009 Iturrate, I.; Antelis, J.; Minguez, J.; “Synchronous EEG Brain-Actuated Wheelchair with Automated Navigation” ; Kobe, Japan; May 12-17, 2009 Wolpaw, J. R.; Brain–Computer Interface; Squire LR (ed.) Encyclopedia of Neuroscience, volume 2, pp. 429-437. Oxford: Academic Press; 2009 Bibliografia
 767–791; 2March, 2002 Gerven, Marcel van; Farquhar, Jason; Schaefer, Rebecca; Vlek, Rutger; Geuze, Jeroen; Nijholt, Anton; Ramsey, Nick; Haselager, Pim; Vuurpijl, Louis; Gielen, Stan; Desain, Peter; The brain–computer interface cycle;.Neural Eng. 6 (2009) (10pp); 2009 Escolano, C.; Antelis, J.; Minguez, J.; Human Brain-Teleoperated Robot between Remote Places ; Kobe, Japan; May , 2009 Iturrate, I.; Antelis, J.; Minguez, J.; Synchronous EEG Brain-Actuated Wheelchair with Automated Navigation ; Kobe, Japan; May 12-17, 2009 Wolpaw, J. R.; Brain–Computer Interface; Squire LR (ed.) Encyclopedia of Neuroscience, volume 2, pp Oxford: Academic Press; 2009 Bibliografia.")
Apresentações semelhantes





; Estudos do sinal óptico intrínseco concomitante à depressão alastrante em retinas.>")

 Universidade do Minho.>")











