Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Plataforma Arduino no Controle de Velocidade de PIG’s Apresentador: Gustavo Fernandes de Lima Instituição: UFRN/LAMP

2
Introdução Dutos de transporte de petróleo/derivados frequentemente sofrem com o acúmulo de parafina/outros compostos em suas paredes; Aumento nas pressões das bombas e redução na vazão por causa desses detritos (diminuição da área útil do duto) ; Possibilidade de causar corrosão, podendo culminar com o rompimento do duto e posterior vazamento do produto transportado.
 ; Possibilidade de causar corrosão, podendo culminar com o rompimento do duto e posterior vazamento do produto transportado.")
3
Introdução Solução: utilização de PIG’s PIG do inglês Pipeline Inspection Gauge ou ferramenta para inspeção de dutos; Utilizado para a desobstrução interna e/ou inspeção da integridade interna/externa de uma tubulação; Projetado para ser empurrado pela pressão do fluido dentro de um duto.

4
Possível Solução: PIG Representação de um PIG dentro do duto

5
Classificação dos PIG’s PIG de Limpeza (Cleaning PIG) - Capaz de remover o acúmulo de sujeira das paredes internas dos dutos; PIG Instrumentado (Smart PIG) - Por meio de diversos sensores, é capaz de detectar defeitos no duto inspecionado; Para o correto funcionamento dos sensores, a velocidade deve ser mantida entre 1 e 5 m/s.
 - Capaz de remover o acúmulo de sujeira das paredes internas dos dutos; PIG Instrumentado (Smart PIG) - Por meio de diversos sensores, é capaz de detectar defeitos no duto inspecionado; Para o correto funcionamento dos sensores, a velocidade deve ser mantida entre 1 e 5 m/s.")
6
Classificação dos PIG’s Exemplos de PIG de Limpeza e PIG Instrumentado:

7
Controle de Velocidade Portanto, faz-se necessário o uso de um sistema de controle de velocidade para o PIG Instrumentado; Velocidade pode ser controlada por meio do controle do diferença de pressão entre as pressões montante e jusante do PIG; O diferencial de pressão é regulada por meio de uma válvula by-pass desenvolvida neste trabalho.

8
“Tiro” Na ocorrência de obstrução no duto, o PIG emperra dentro do duto e a sua pressão a montante aumenta até vencer o obstáculo e dispara em alta velocidade; Na ocorrência do “tiro”, os sensores não funcionam corretamente devido à alta velocidade; Objetivo do trabalho: propor uma tecnologia capaz de minimizar os efeitos do evento “tiro”.

9
Bancada de Testes Construída para simular situações de “tiro”; V T : Válvula de tiro, V BP : Válvula by-pass; De aço galvanizado, 4” diâmetro e comprimento 2 m; Manômetros e transdutores de pressão;

10
Bancada de Testes

11
Válvula by-pass Válvula by-pass limita o fluxo de fluido que passa através do PIG e, assim, regula o diferencial de pressão entre montante e jusante; Utiliza pressão presente no próprio duto para permitir a abertura da válvula; Acionamento do pistão é realizado via solenóide.

12
Válvula by-pass

13
Arduino Uno Baseada em hardware e software livres, fáceis de usar e baixo custo; Microcontrolador ATMega328 (Empresa Atmel); Programado em C/C++; Destinada a qualquer pessoa interessada em criar objetos ou ambientes interativos.
; Programado em C/C++; Destinada a qualquer pessoa interessada em criar objetos ou ambientes interativos.")
14
Arduino Uno

15
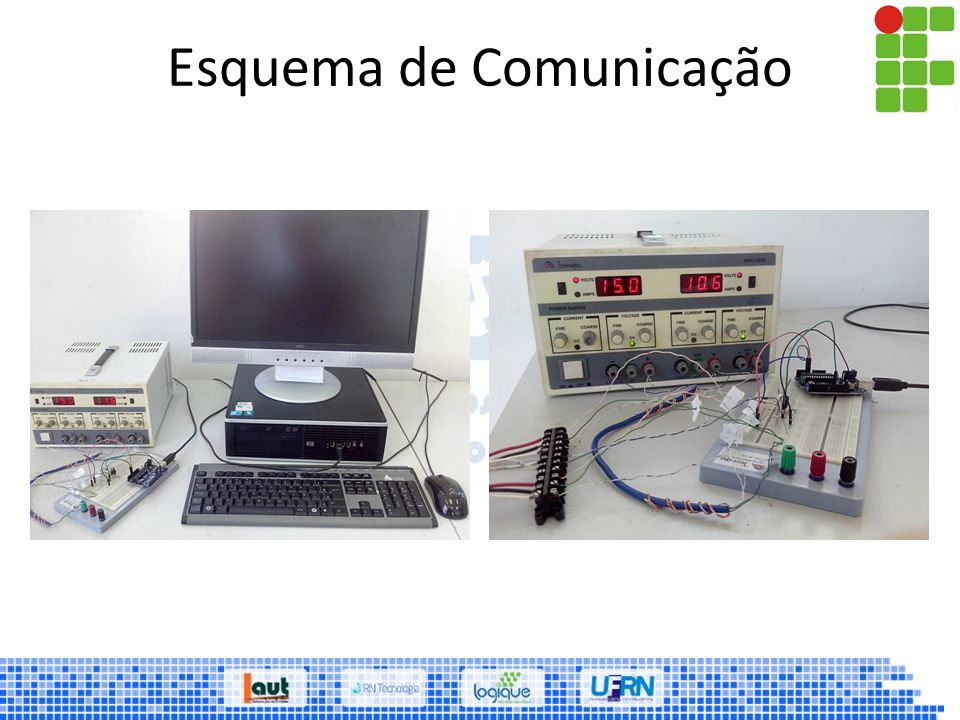
Esquema de Comunicação O Arduino realiza a interface entre a bancada de testes e o PC: – Lê tensão dos transdutores (0-5V) e envia para o PC via USB – Responsável também por acionar a válvula by-pass O algoritmo de controle é implementado no Arduino; Um PC é usado para exibir os sinais de forma gráfica por meio do software Matlab TM.
 e envia para o PC via USB – Responsável também por acionar a válvula by-pass O algoritmo de controle é implementado no Arduino; Um PC é usado para exibir os sinais de forma gráfica por meio do software Matlab TM.")
16
Esquema de Comunicação

18
Estratégia de Controle Controle ON/OFF (abre/fecha) da válvula by-pass, de modo a se obter uma modulação na saída: similar à modulação PWM; Objetivo: minimizar um grande diferencial de pressão o mais rápido possível.
 da válvula by-pass, de modo a se obter uma modulação na saída: similar à modulação PWM; Objetivo: minimizar um grande diferencial de pressão o mais rápido possível.")
19
Estratégia de Controle Controlador aciona abertura da válvula em função do valor da diferença de pressão; – Quanto maior ΔP, mais tempo V BP fica aberta. ΔP (PSI)Abertura de V BP (%) ΔP > 1,5 ΔP REF 100 1,2 ΔP REF < ΔP < 1,5 ΔP REF 50 1,1 ΔP REF < ΔP < 1,2 ΔP REF 20 ΔP REF < ΔP < 1,1 ΔP REF 10
Abertura de V BP (%) ΔP > 1,5 ΔP REF 100 1,2 ΔP REF < ΔP < 1,5 ΔP REF 50 1,1 ΔP REF < ΔP < 1,2 ΔP REF 20 ΔP REF < ΔP < 1,1 ΔP REF 10.")
20
Procedimento Experimental Simulação de “tiros” ΔP REF = 10 psi P Montante = 50 psi Abertura de V T em t = 15 s

21
Resultados Ensaio 1

22
Resultados Ensaio 2

23
Conclusões Bancada de testes mostrou-se capaz de realizar simulações do evento conhecido por “tiro”; Utilização do Arduino para aquisição de sinais e acionamento da válvula. Os resultados experimentais mostraram o sucesso na detecção do ”tiro” e a rápida abertura da válvula by-pass. Permitindo a implementação de um controlador de baixo custo.

24
Conclusões Válvula by-pass desenvolvida utiliza energia presente no próprio duto para seu funcionamento e permite uma queda significativa no diferencial de pressão; Resultados indicam possibilidade de controlar a velocidade do PIG a partir do controle do diferencial de pressão; Futuro: substituir o controlador atual por um controlador inteligente do tipo Fuzzy e realizar o controle em situações mais gerais (não limitando-se ao “tiro”).
.")
25
Obrigado Agradecimentos

Apresentações semelhantes


>")










; Pedro de Deus Vieira.>")





