Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Estabilidade (C. T. Chen, Capítulo 5)
Sistemas Lineares

2
Introdução Sistemas são projetados para cumprir certas tarefas ou processar sinais. Se um sistema não é estável, ele pode queimar, desintegrar-se ou saturar quando um sinal, não importa quão pequeno, é aplicado. Portanto, um sistema instável é inútil na prática, e estabilidade é uma exigência básica para todos os sistemas. Além da estabilidade, sistemas devem atender outros requisitos, tais como rastrear sinais desejados e suprimir ruído, para ser útil na prática. A resposta de sistemas lineares pode sempre ser decomposta na resposta ao estado zero e na resposta à entrada zero. É costume estudar as estabilidades dessas duas respostas separadamente. Nós introduziremos a estabilidade BIBO (Bounded Input, Bounded Output) para a resposta ao estado zero e as estabilidades marginal e assintótica para a resposta à entrada zero.
 para a resposta ao estado zero e as estabilidades marginal e assintótica para a resposta à entrada zero.")
3
Pêndulo invertido Ver capítulo 2, para sua descrição linearizada (haste em posição bem próxima à vertical) Sistema originalmente instável.

4
Efeitos da instabilidade
A ponte pênsil Tacoma Narrows, em Tacoma, Washington, USA, com 1600 m, colapsou em 7 de novembro de 1940, alguns meses depois de ser inaugurada. O colapso ocorreu após um vento de 65 km/h fazê-la vibrar e entrar em ressonância. Acesso a vídeo:

5
Ponte Tacoma Narrows

6
Estabilidade entrada-saída (BIBO stability)
")
7
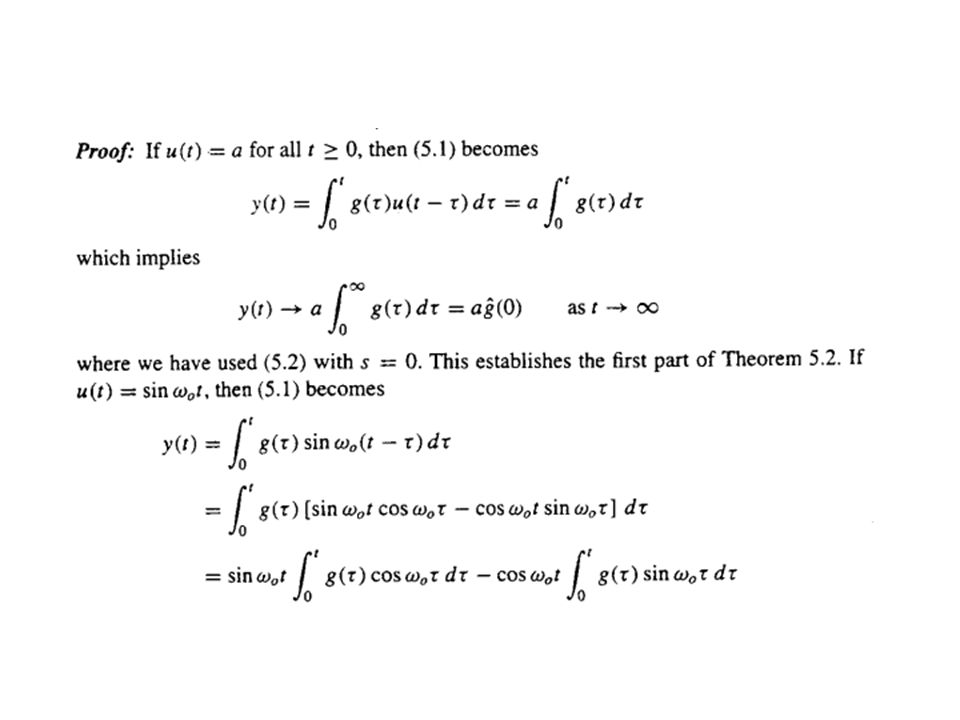
Teorema 5.1 Um sistema SISO descrito por (5.1) é estável no sentido BIBO se, e somente se, 𝑔(𝑡) é absolutamente integrável em [0,∞), ou 0 ∞ 𝑔(𝑡) 𝑑𝑡≤𝑀<∞ para alguma constante 𝑀.
 é estável no sentido BIBO se, e somente se, 𝑔(𝑡) é absolutamente integrável em [0,∞), ou 0 ∞ 𝑔(𝑡) 𝑑𝑡≤𝑀<∞ para alguma constante 𝑀.")
8
Prova a) suficiência: se 𝑔(𝑡) é absolutamente integrável, toda entrada limitada excita uma saída limitada (o sistema é BIBO estável) Prova por contradição: se 𝑔(𝑡) não é absolutamente integrável, alguma entrada limitada gerará uma saída ilimitada a) necessidade: se o sistema é BIBO estável 𝑔(𝑡) é absolutamente integrável
 não é absolutamente integrável, alguma entrada limitada gerará uma saída ilimitada. a) necessidade: se o sistema é BIBO estável 𝑔(𝑡) é absolutamente integrável.")
9
Em geral, porém, uma função absolutamente integrável é limitada e se aproxima de zero quando 𝑡⟶∞.

10
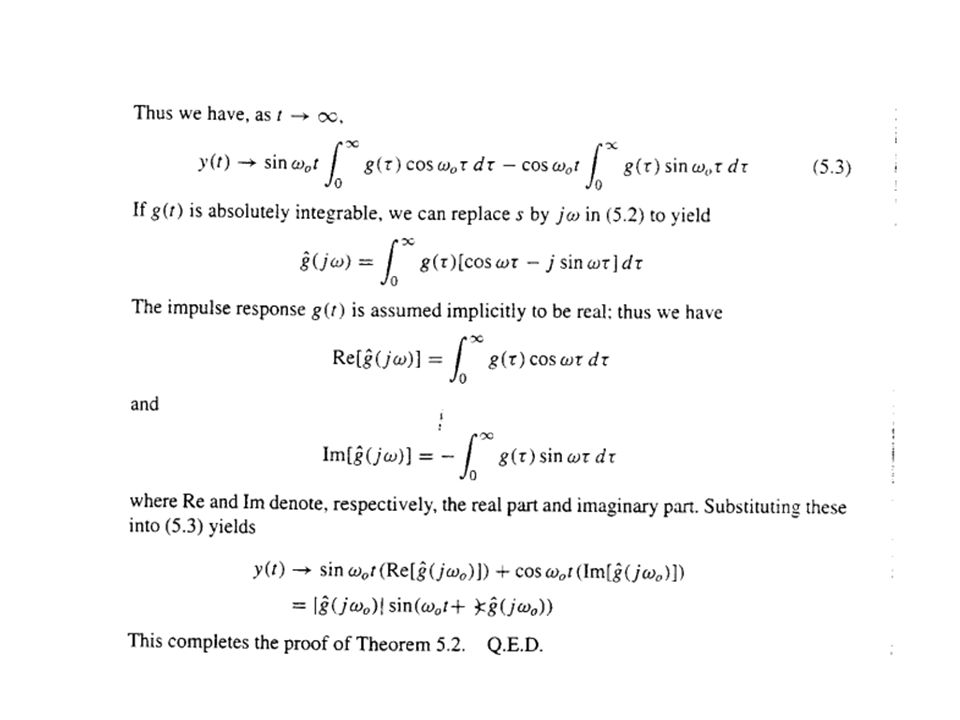
Teorema 5.2 𝑔 0 = 0 ∞ 𝑔 𝜏 𝑒 −0.𝜏 𝑑𝜏= 0 ∞ 𝑔 𝜏 𝑑𝜏

17
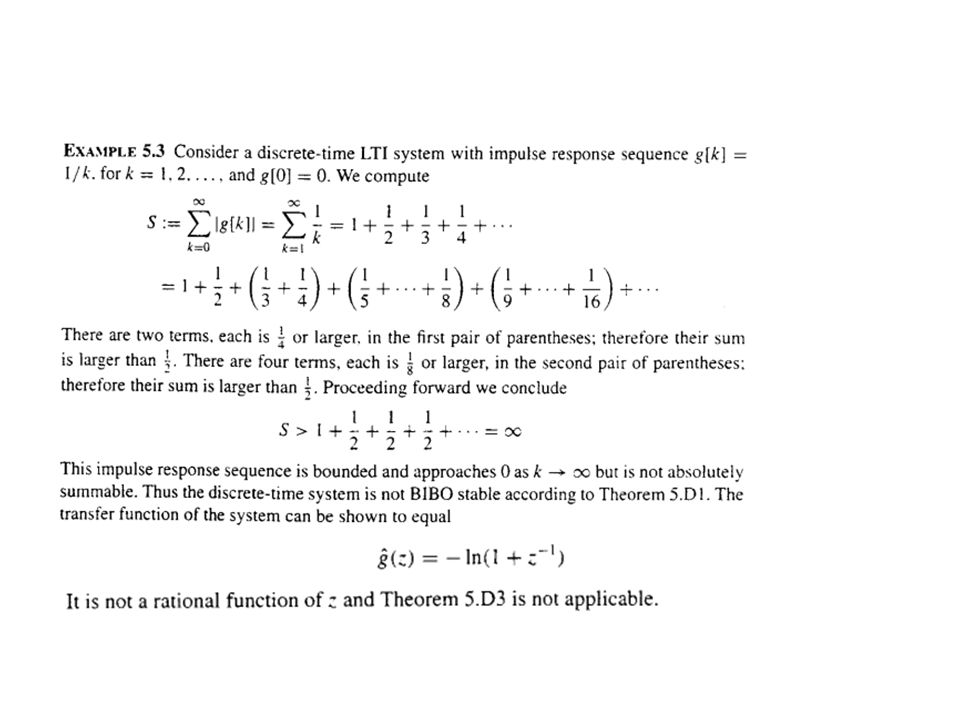
Caso discreto

19
Teorema 5.D3

26
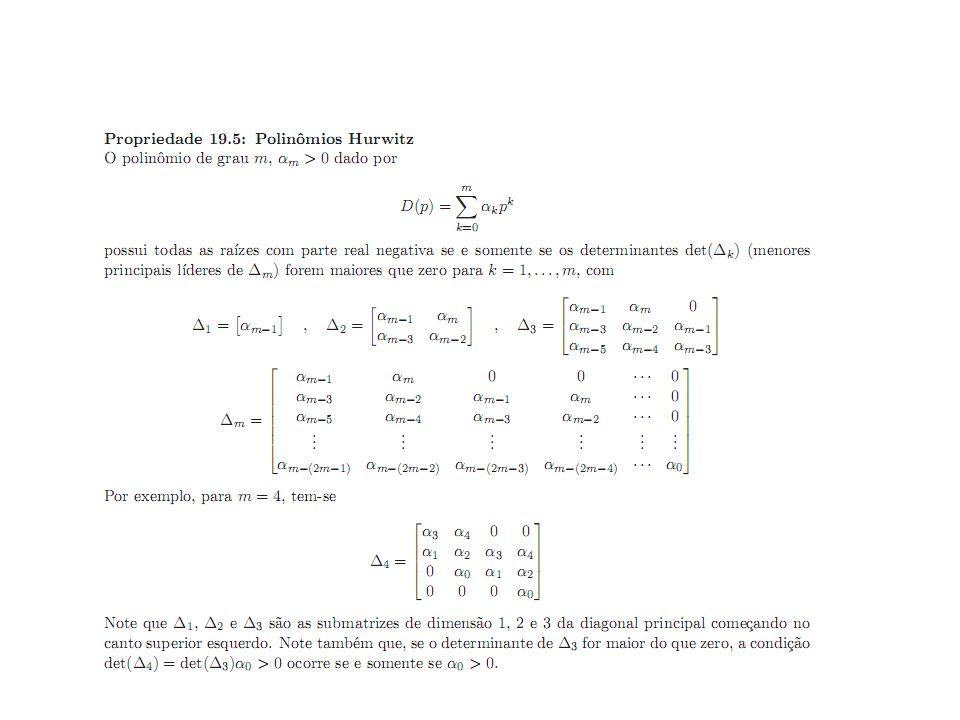
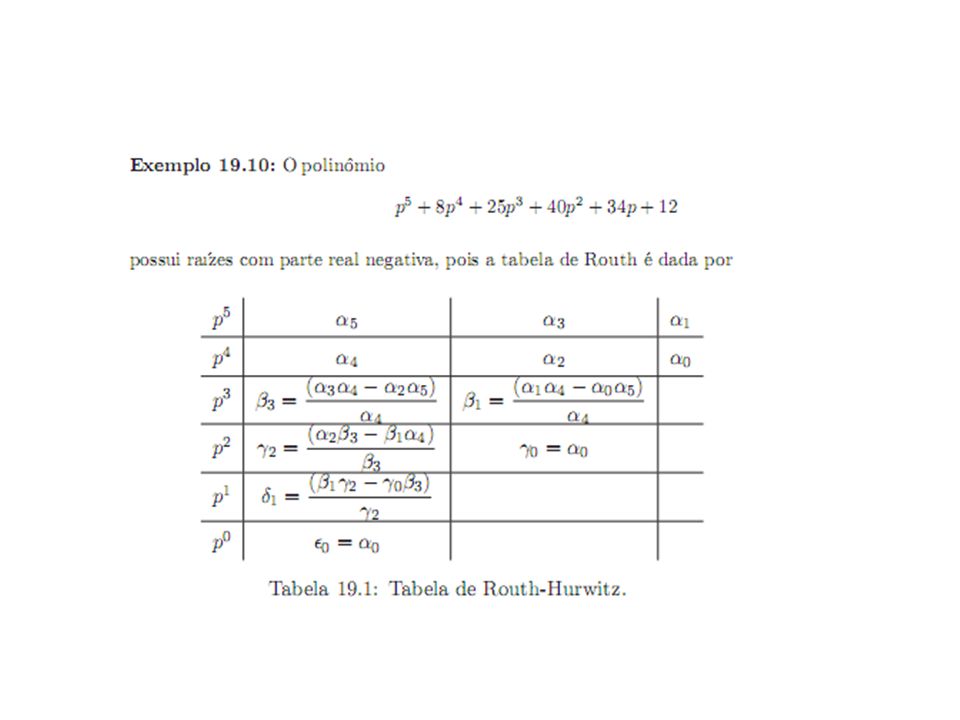
Tabela de Routh

29
Tabela de Routh-Hurwitz

30
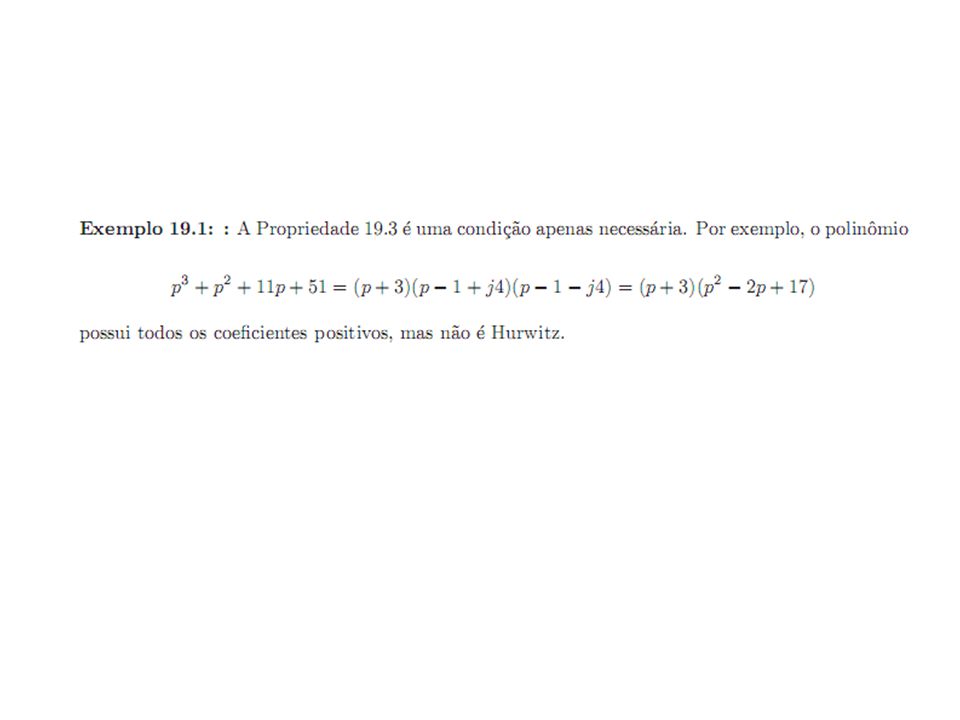
Exemplo

31
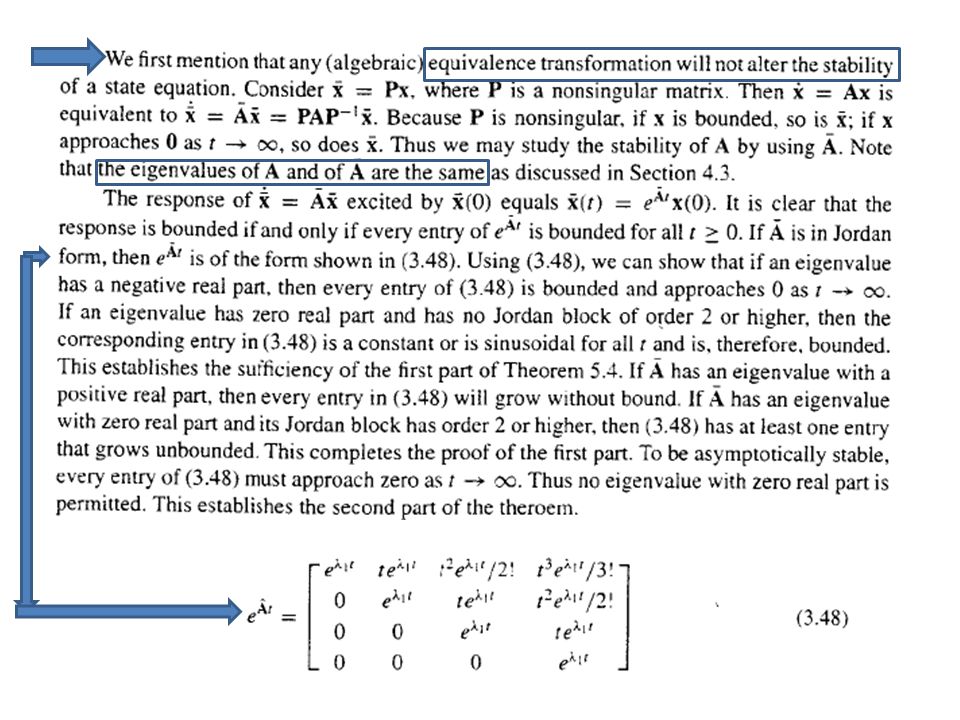
Estabilidade interna 𝐱 𝑡 = 𝑒 𝐀𝑡 𝐱 0 (ver Capítulo 4)
")
34
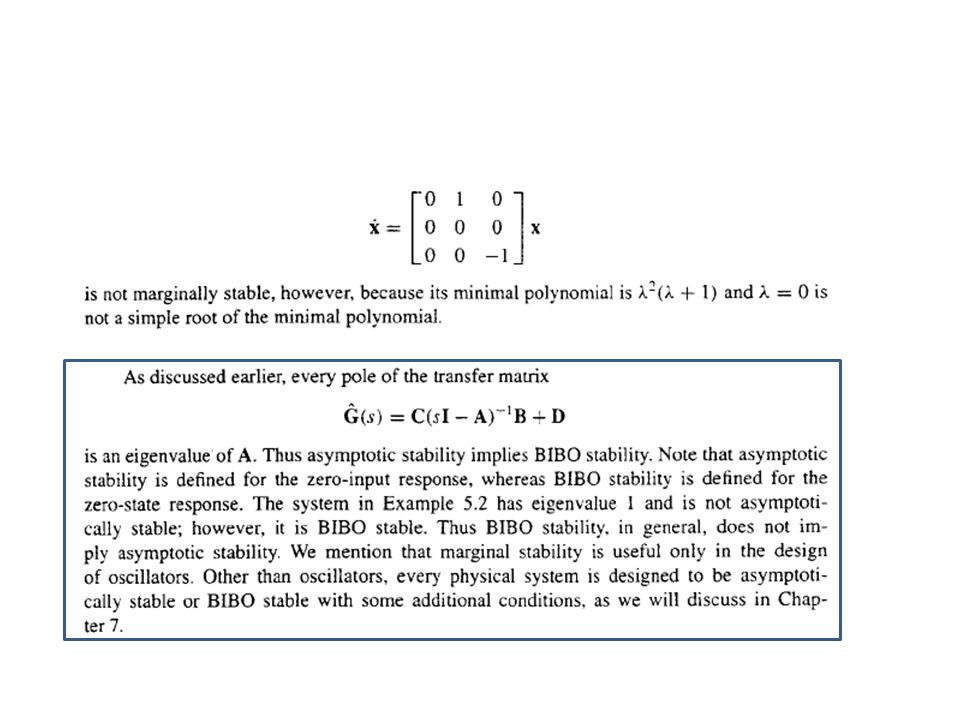
Polinômio mínimo: 𝜓 𝐀 =0. No caso acima, 𝐀 𝐀+𝐈 =𝟎, ou seja, o polinômio mínimo é mesmo 𝜆(𝜆+1).
.")
36
Caso discreto

37
A demonstração é similar ao caso de tempo contínuo, usando a forma de Jordan de 𝐀.

38
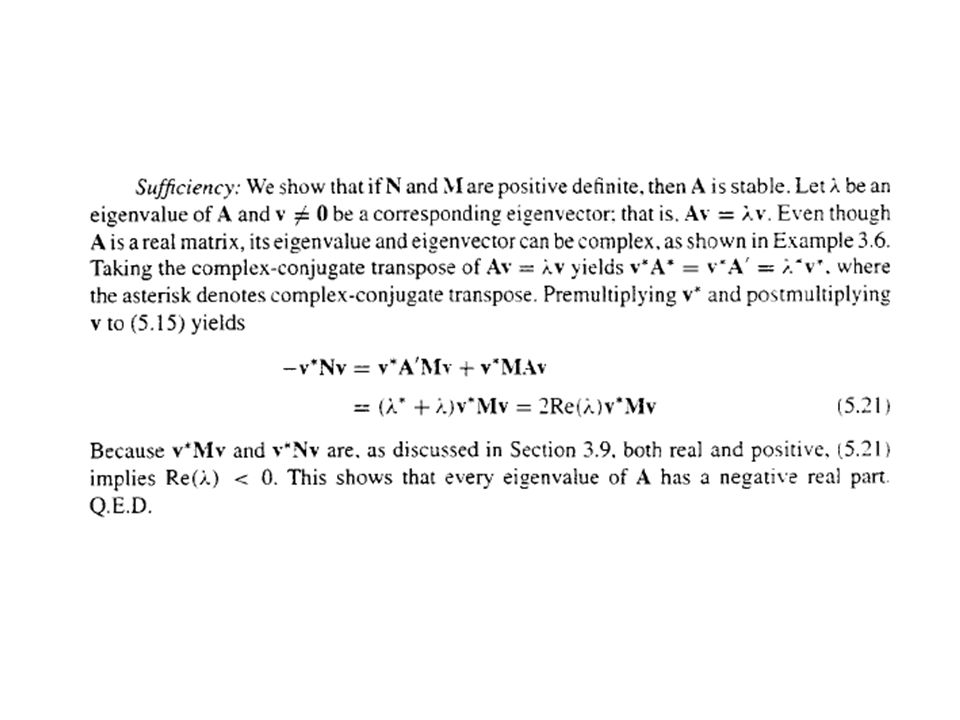
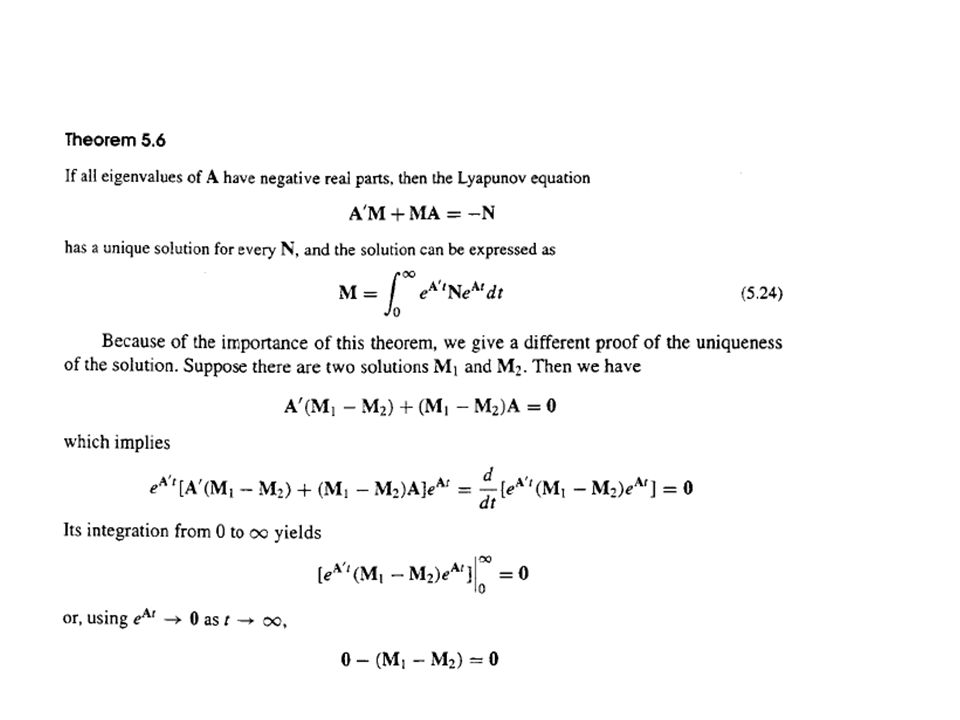
Teorema de Lyapunov

39
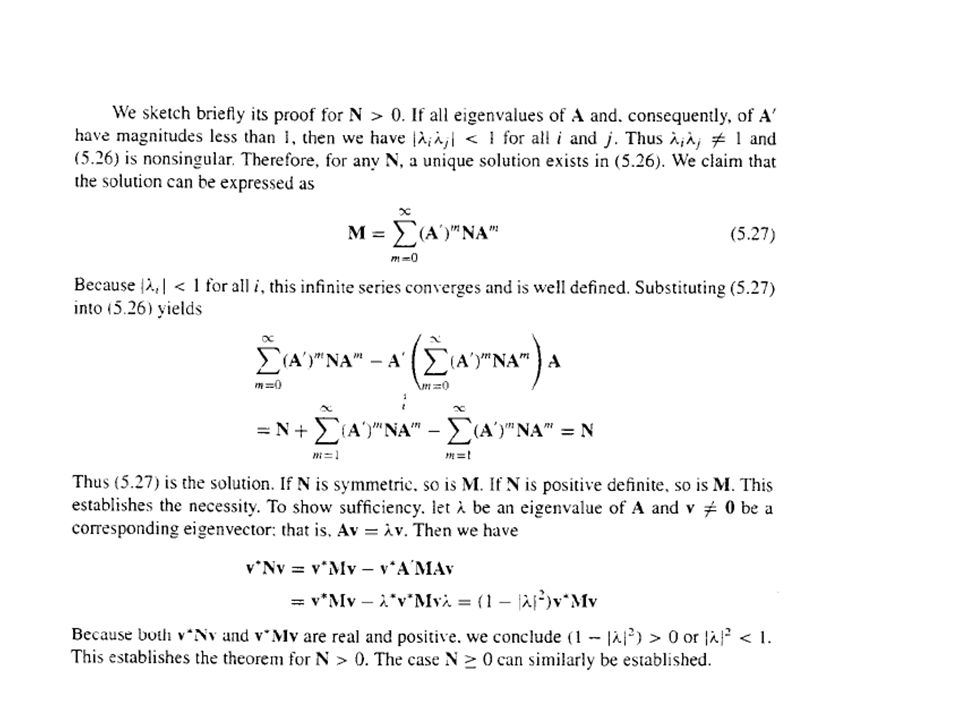
Prova do teorema

42
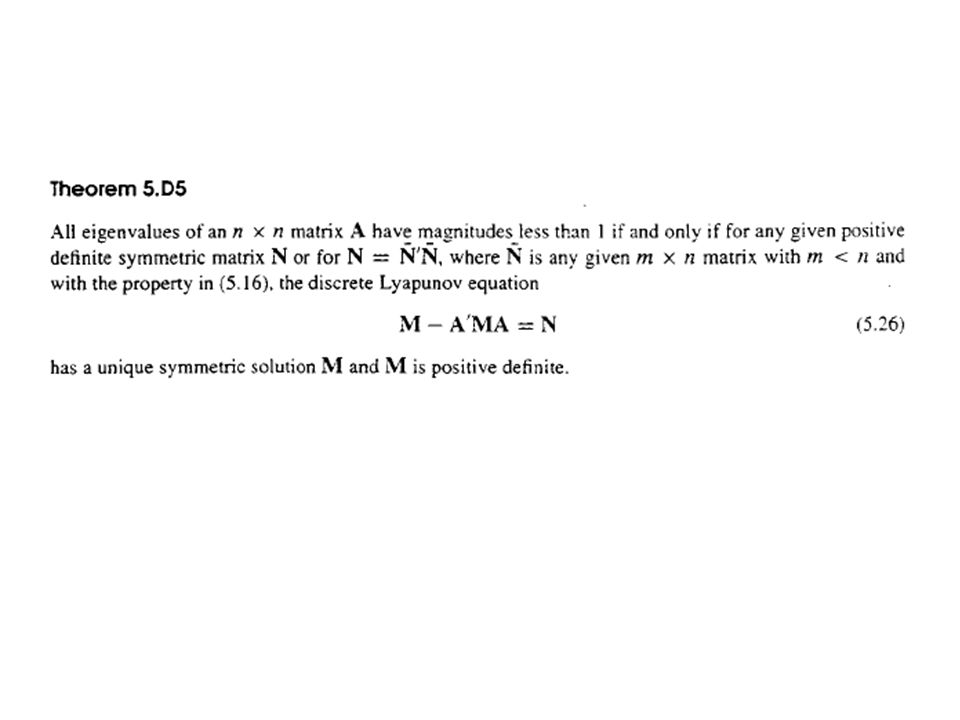
Caso discreto da Equação de Lyapunov

46
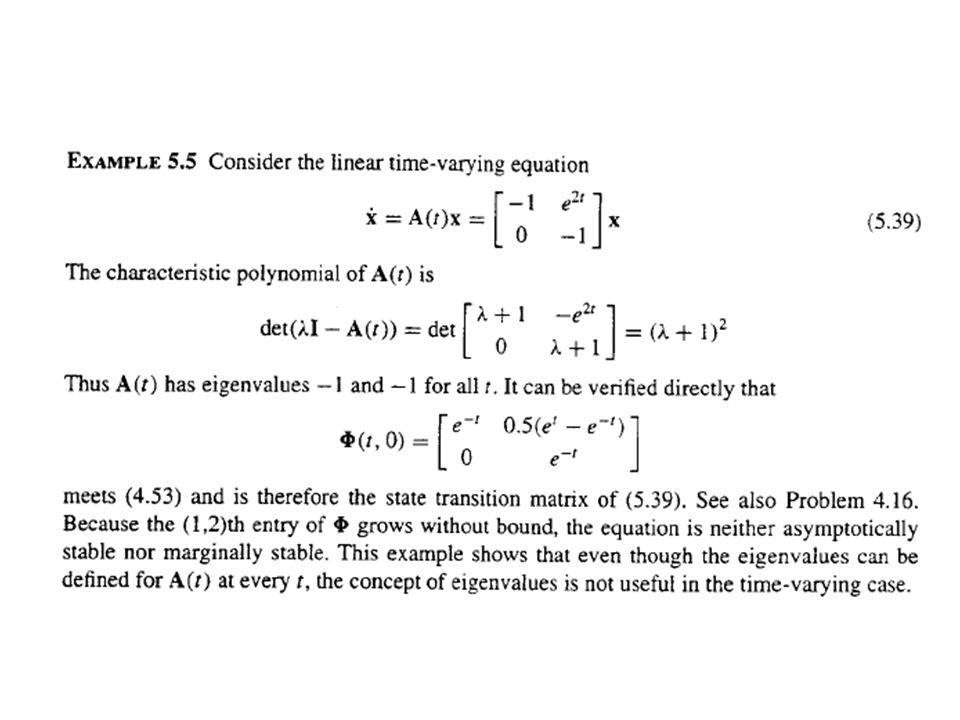
Estabilidade de sistemas LTV

Apresentações semelhantes






























: sincronismo de tarefas,>")
