Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Universidade Federal do Rio Grande do Norte Centro de Tecnologia
Departamento de Engenharia Elétrica TRABALHO DE INSTRUMENTAÇÃO ELETRÔNICA Flávio César N de Oliveira Maio/07 Professor: Luciano Fontes

2
Projeto de Controle de Temperatura de Caldeiras Industriais

3
Objetivo Neste projeto é proposto um sistema automatizado de controle
de temperatura de caldeiras industriais capaz de amenizar os custos de operação e aproveitar ao máximo sua capacidade de produção.

4
Definições Caldeira é um recipiente metálico cuja função é, entre muitas, a produção de vapor através do aquecimento da água. As caldeiras em geral são empregadas para alimentar máquinas térmicas, autoclaves para esterilização de materiais diversos, cozimento de alimentos através do vapor, calefação ambiental. Caldeira Industrial

5
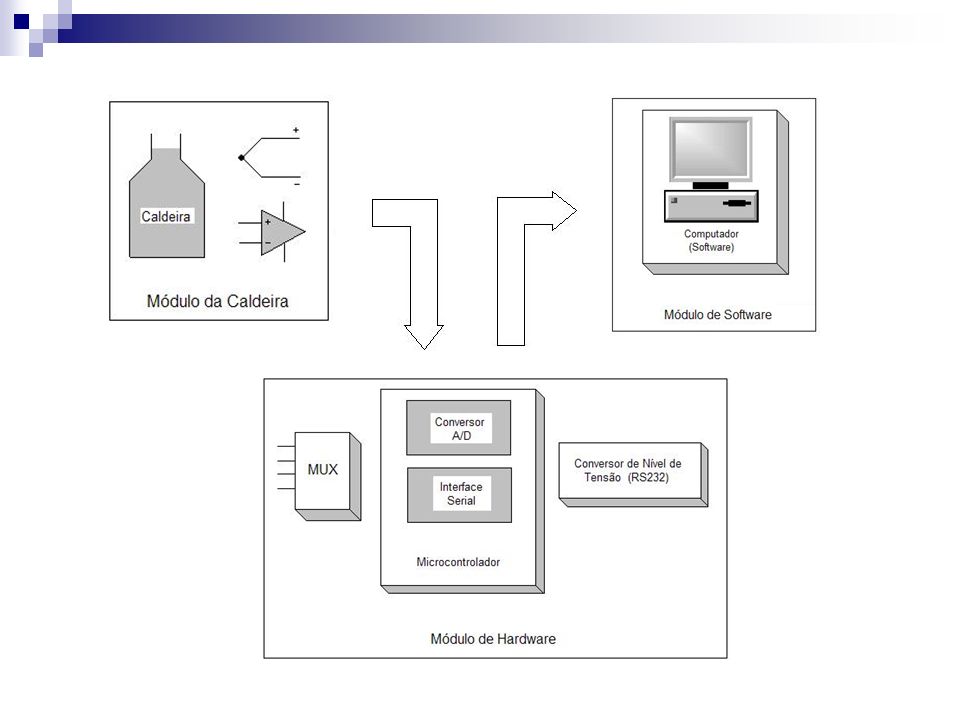
Projeto Sub-Dividido em três Módulos:
Módulo da Caldeira - composto por caldeira industrial, sensores de temperatura (termopares), circuito de condicionamento de sinais baseados em amplificadores operacionais (conformador) e atuadores de temperatura (relés). Módulo de Hardware - responsável pela realização do controle da temperatura, baseado em microcontrolador (PIC 16F876). Módulo de Software - Responsável pela interface com o operador. É realizada através de computador, desenvolvido em linguagem orientada a objetos (C++).
, circuito de condicionamento de sinais baseados em amplificadores. operacionais (conformador) e atuadores de temperatura (relés). Módulo de Hardware - responsável pela realização do controle da temperatura, baseado em microcontrolador (PIC 16F876). Módulo de Software - Responsável pela interface com o operador. É realizada. através de computador, desenvolvido em linguagem orientada a objetos (C++).")
7
Módulo da Caldeira Transdutor de Temperatura Conformador

8
Transdutores de Temperatura
A escolha do transdutor mais adequado deve obedecer a algumas diretrizes, como a precisão e o intervalo de temperatura de operação. Tendo em vista estes fatores, foi escolhido o sensor de temperatura do tipo TERMOPAR.

9
Termopar Em 1822, o físico Thomas Seebeck descobriu (acidentalmente) que a junção de dois metais gera uma tensão elétrica que é função da temperatura a qual está submetida a junção. O funcionamento dos termopares é baseado neste fenômeno, que é conhecido como Efeito de Seebeck. Embora praticamente se possa construir um termopar com qualquer combinação de dois metais, utilizam-se apenas algumas combinações normalizadas, isto porque possuem tensões de saída previsíveis e suportam grandes gamas de temperaturas. Neste sistema é utilizado o termopar do tipo T, no qual os materiais presentes são Cobre e Constantan (cobre+níquel). Este tipo de termopar é capaz de medir temperaturas entre –185 ºC e 400 ºC.
 que a junção de dois metais gera uma tensão elétrica que é função da temperatura a qual está submetida a junção. O funcionamento dos termopares é baseado neste fenômeno, que é conhecido como Efeito de Seebeck. Embora praticamente se possa construir um termopar com qualquer combinação de dois metais, utilizam-se apenas algumas combinações normalizadas, isto porque possuem tensões de saída previsíveis e suportam grandes gamas de temperaturas. Neste sistema é utilizado o termopar do tipo T, no qual os materiais. presentes são Cobre e Constantan (cobre+níquel). Este tipo de termopar é capaz. de medir temperaturas entre –185 ºC e 400 ºC.")
10
Intervalo de Temperatura (°C)
Termopar Tipos Intervalo de Temperatura (°C) Voltagem de Saída (mV) E 0 à 980 0 à 75,12 J -185 à 870 -7,52 à 50,05 K -185 à 1260 -5,51 à 51,05 T -185 à 400 -5,28 à 20,80 Tipos Material Positivo Material Negativo E Cromo Constantan J Ferro K Alumínio T Cobre
 Voltagem de Saída (mV) E. 0 à à 75,12. J à ,52 à 50,05. K à ,51 à 51,05. T à ,28 à 20,80. Tipos. Material Positivo. Material Negativo. E. Cromo. Constantan. J. Ferro. K. Alumínio. T. Cobre.")
11
Circuito Conformador Como os sinais gerados são muito pequenos, na ordem dos mV, o que torna difícil sua leitura e, por conseqüência, a análise de características, é necessária a amplificação destes sinais. O circuito conformador amplifica os sinais de baixa amplitude para possibilitar uma medição precisa. A melhor forma encontrada para amplificar os sinais dos sensores foi a utilização do amplificador de instrumentação INA129 da Texas Instruments. Tal amplificador pode fornecer ganhos de até vezes aumentando consideravelmente a amplitude do sinal.

12
Circuito Conformador

13
Comportamento do Sensores
Após a amplificação dos sinais, pode-se analisar o comportamento dos termopares, ou seja, a linearidade das respostas (temperatura X tensão de saída). A saída do termopar não é linear. A relação entre a temperatura e a tensão de saída é uma equação polinomial de 5ª a 9ª ordem dependendo do tipo do termopar. Após a coleta de algumas amostras de medidas de temperatura e tensão de saída, pode-se montar uma tabela, que por sua vez gera um gráfico (T x V), ou seja, a tensão de saída do conformador variando de maneira proporcional à temperatura. Utilizando as amostras e técnicas de regressão linear chega-se a uma equação do tipo Y = a + bx
. A saída do termopar não é linear. A relação entre a temperatura e a. tensão de saída é uma equação polinomial de 5ª a 9ª ordem dependendo do tipo. do termopar. Após a coleta de algumas amostras de medidas de temperatura e. tensão de saída, pode-se montar uma tabela, que por sua vez gera um gráfico. (T x V), ou seja, a tensão de saída do conformador variando de maneira. proporcional à temperatura. Utilizando as amostras e técnicas de regressão linear chega-se a uma. equação do tipo. Y = a + bx.")
14
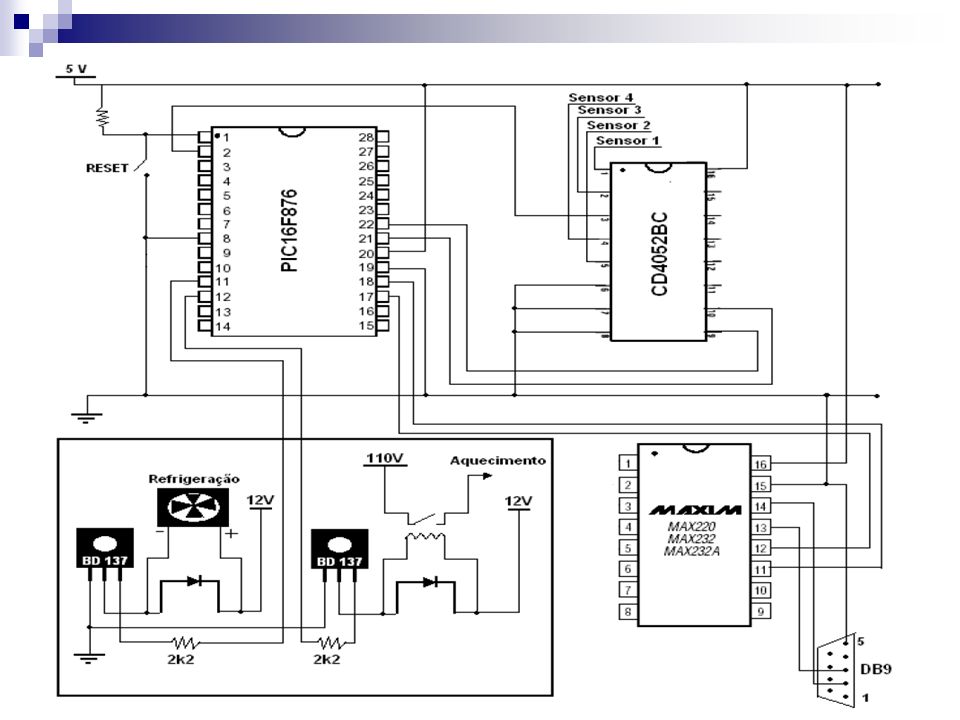
Módulo de Hardware Multiplexador Microcontrolador Conversor de Nível

15
Multiplexador Através deste componente torna-se possível a realização da aquisição de quatro diferentes sinais, referentes a quatro sensores de temperatura, utilizando apenas um canal de conversão A/D. Todos os sinais provenientes dos sensores são aplicados no multiplexador. O microcontrolador realiza a seleção do sinal desejado através dos 2 bits de seleção presentes no multiplexador. O multiplexador utilizado no projeto é o CD4052BC da Fairchild Semiconductors, este componente é um mux/demux analógico de 4 canais ( 4/1 ) com duas entradas de seleção digital.
 com duas entradas de seleção digital.")
16
Microcontrolador (PIC 16F876)
O PIC realiza a função de controle de temperatura baseado em informações do operador como a equação de conversão para °C e a temperatura requisitada, ou seja, o sistema regula a temperatura da caldeira para que permaneça igual ou próxima à requisitada pelo usuário. Como todo controlador, o PIC 16F876 realiza os cálculos necessários obedecendo aos sinais de entrada (sinais dos sensores e parâmetros fornecidos pelo usuário). Através dos pinos Rb0 e Rb1, o microcontrolador “escolhe” uma combinação de bits que irão definir a seqüência de aquisição dos sinais dos sensores ligados ao Mux.
. Através dos pinos Rb0 e Rb1, o microcontrolador escolhe uma combinação de bits que irão definir a seqüência de aquisição dos sinais dos sensores ligados ao Mux.")
17
Facilidades do PIC 16F876 Conversor A/D incorporado: Para possibilitar os cálculos necessários, Os sinais adquiridos são convertidos da forma analógica para a forma digital. Esta tarefa é realizada no microcontrolador pelo Módulo de Conversão Analógico-Digital (A/D), um dos recursos disponíveis no PIC-16F876. Transmissão serial: A transmissão serial dos valores de temperatura em cada um dos sensores, é realizada, pelo módulo MSSP (Master Synchronous Serial Port ou Porta Serial Síncrona Master) incorporado ao microcontrolador.
, um dos recursos disponíveis no. PIC-16F876. Transmissão serial: A transmissão serial dos valores de temperatura em cada um dos sensores, é realizada, pelo módulo MSSP (Master Synchronous Serial Port ou Porta Serial Síncrona Master) incorporado ao microcontrolador.")
18
Conversor de Nível O nível do sinal num PC é de -10V para o nível lógico um e +10V para nível lógico zero. Como os níveis lógicos num microcontrolador são de +5V para o nível lógico um e 0V para o nível lógico zero, a utilização de uma componente eletrônico capaz de realizar as conversões dos níveis de tensão é necessária. Um circuito integrado projetado especialmente para executar este trabalho é o MAX232. O MAX232 é um conversor de nível de dois canais de recepção e dois de transmissão. Cada canal receptor converte os sinais provenientes da porta serial para o nível 5V TTL/CMOS. Cada canal transmissor converte as entradas em nível TTL/CMOS para níveis compatíveis a porta serial do PC.

20
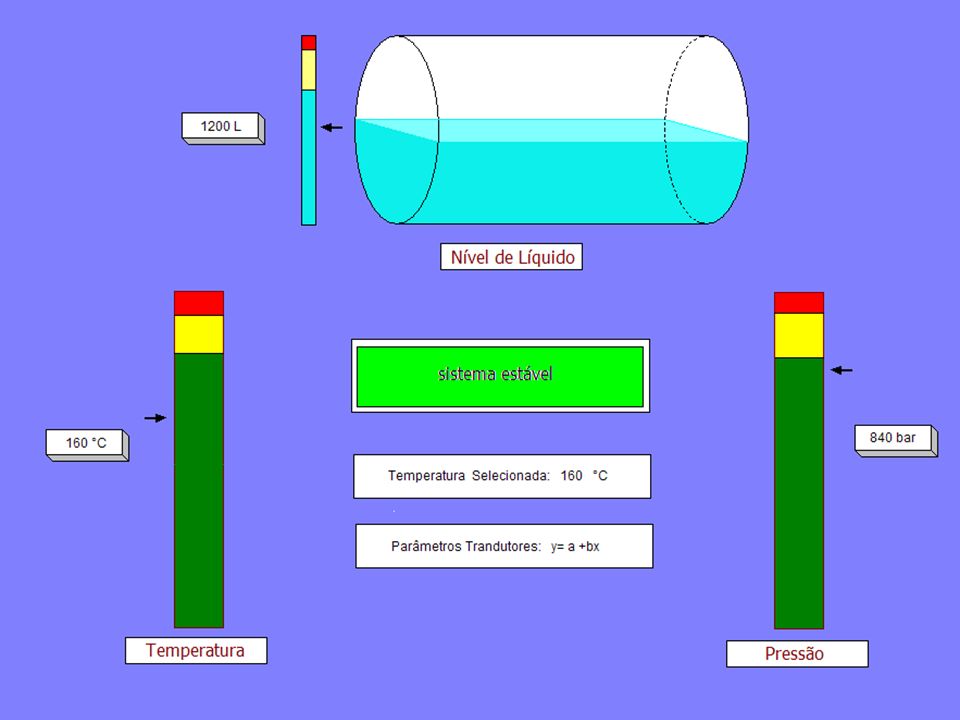
Módulo de Software O PC (software) é a interface do sistema com o usuário. Através dele o usuário pode manter-se atualizado sobre o atual estado do sistema (tempo real) e configurar o mesmo de acordo com suas necessidades. O desenvolvimento deste módulo foi realizado através de linguagem de programação orientada a objetos de maneira a facilitar a estruturação dos dados. No caso, a linguagem utilizada foi a C++, e o software é o Borland Builder C++ (versão 5) da Borland.
 e configurar o mesmo de acordo com suas necessidades. O desenvolvimento deste módulo foi realizado através de linguagem. de programação orientada a objetos de maneira a facilitar a estruturação dos. dados. No caso, a linguagem utilizada foi a C++, e o software é o Borland. Builder C++ (versão 5) da Borland.")
23
Conclusões Aplicação da tecnologia de microcontroladores em substituição a tecnologia de CLP’s, usualmente utilizada em soluções de automação industrial. Transdutores flexíveis. Sistema Relativamente barato.

24
Referências Microcontrollers PIC16F87X Datasheet. The Microchip Worldwide Site. Disponível em MAX232 Dual EIA-232 Drivers/Receivers Datasheet. Texas Instruments. Disponível em CD4052BC Dual 4-Channel Analog Multiplexer/Demultiplexer Datasheet. Fairchild Semiconductors. Disponível em TOCCI, Ronald J. Sistemas Digitais: Princípios e Aplicações. Prentice Hall, 2003.

25
THE END

Apresentações semelhantes




>")















