Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Aula teórica 7: Realimentação de Sistemas
Influência das ações de controle na resposta dos sistemas de controle Ajuste de controladores pelo método do Ziegler Nichols

2
Influência das acções de controle
na resposta dos sistemas

3
Por sua podem classificar-se PROPORCIONAL----------P
PROPORCIONAL INTEGRAL PI PROPORCIONAL DERIVATIVO PD PROPORCIONAL INTEGRAL DERIVATIVO PID DE ADIANTAMENTO DE FASE DE ATRASO DE FASE DE ATRASO-ADELANTO DE FASE Por sua ação podem classificar-se Usualmente lhes chama compensadores

4
Esta é a que mas usaremos

5
Função de transferência
de um controlador P Terá que sabê-lo

6
Função de transferência
de um controlador PI Terá que sabê-lo

7
Função de transferência
de um controlador PD Terá que sabê-lo

8
Função de transferência
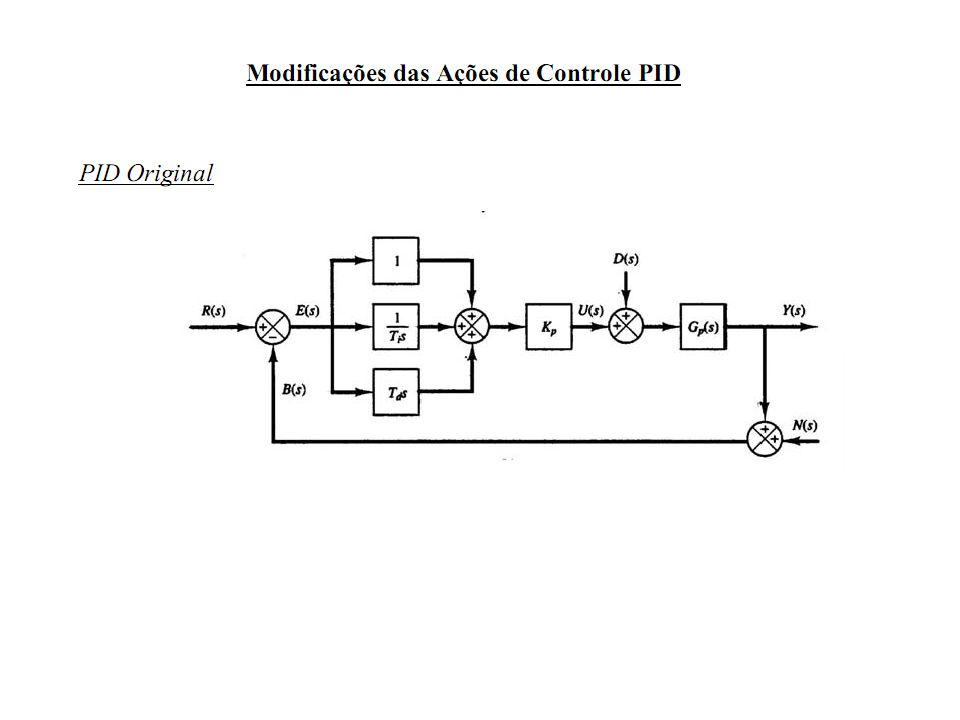
de um controlador PID Terá que sabê-lo

12
Em aulas anteriores estudamos as ações de controle básicas
P PI PD PID Como influi estes nesta? Em aulas anteriores estudamos a resposta transitória e suas especificações Em aulas anteriores estudamos a resposta transitória dos sistemas de ordem superiora e a possibilidade de que se fizessem instáveis Hoje estudamos o erro em estado estável como especificação da resposta quando se estabiliza

13
Controle Proporcional (P)
É um amplificador, com ganho ajustável (K) O aumento do ganho K, diminui o erro de regime (ver tabela resumo de erro) Em geral, o aumento de K torna o sistema mais oscilatório podendo instabilizá-lo Revise os exemplos de aulas anteriores para que veja que aumentos sucessivos de ganho podem fazer que o sistema oscile mais e até se volte instável
 O aumento do ganho K, diminui o erro de regime (ver tabela resumo de erro) Em geral, o aumento de K torna o sistema mais oscilatório. podendo instabilizá-lo. Revise os exemplos de aulas anteriores para que veja. que aumentos sucessivos de ganho podem fazer que o. sistema oscile mais e até se volte instável.")
14
Controlador Proporcional Integral (PI)
Observe que põe um pólo na origem portanto Aumentará o tipo de sistema e então atuará em obter exatidão no estado estável Isto é bom Aumentará a ordem do sistema e então há possibilidades de instabilidade pode degradar o desempenho do controlador em malha fechada. Isto é mau

15
Isto é mau Isto é bom Controlador Proporcional Derivativo (PD)
Só põe um zero Não atua no estado estacionário, portanto não serve para obter exatidão A ação derivativa tem a desvantagem de amplificar os sinais de ruído, o que pode causar um efeito de saturação nos atuadores do sistema. Isto é mau Aumenta o amortização portanto melhora a resposta transitória Isto é bom

16
Controlador Proporcional Integral Derivativo (PID)
Coloca dois zeros Aumenta o amortização portanto melhora a resposta transitória Isto é bom Coloca um pólo na origem que aumenta o tipo Atuará em obter exatidão no estado estável Isto é bom

17
? Que valores dará aos parâmetros de cada controlador (K, Kd, Ki)? Podem ser tomados arbitrariamente? NÃO Durante muitos anos grande quantidade de especialistas trabalharam nisto Hoje em dia ninguém pode enumerar a quantidade de métodos e procedimentos de ajuste que existem

18
Método chamado do Ziegler- Nichols
(1/4 razão de decréscimo) As regras de ajuste foram propostas em 1942 e ainda se utilizam Apoiou-se na experiência com a resposta transitória de muitos tipos de sistemas Sua origem se apóia na resposta real da planta, nós o utilizaremos com os modelos dos sistemas Geralmente os sistemas que se ajustam com este método oferecem 50% de sobrepasso o qual é indesejável por isso muitas vezes se usa como ponto de partida e se procede a um ajuste fino depois
 As regras de ajuste foram propostas em 1942 e ainda se utilizam. Apoiou-se na experiência com a resposta transitória de muitos tipos. de sistemas. Sua origem se apóia na resposta real da planta, nós o utilizaremos. com os modelos dos sistemas. Geralmente os sistemas que se ajustam com este método oferecem 50% de sobrepasso o qual é indesejável por isso muitas vezes se usa como ponto. de partida e se procede a um ajuste fino depois.")
19
No que consiste? Em um laço de controle como este, coloca-se o controlador PID em modo P Fazem-se aumentos sucessivos do ganho até que se obtenha uma resposta que oscile de maneira sustentada

20
Nessa resposta se mede o período da onda e lhe chamaremos Pu
Ao valor do ganho que produziu essa resposta lhe chamaremos Ku Logo

21
observe e conclua sobre o resultado
Para esse laço fechado de controle, se ajustarmos o controlador pelo método do Ziegler- Nichols obtêm as respostas que se vêem no gráfico EXEMPLO observe e conclua sobre o resultado

22
Para terminar Recorde que O PID podemos escrever o de duas formas
Assim está em muitos livros e também o usaram Ziegler-Nichols Assim está em muitos livros e também no MATLAB Notas do professor Bibliografia

Apresentações semelhantes