Carregar apresentação
A apresentação está carregando. Por favor, espere

1
MGattass Rotações e Quatérnios

2
MGattass Objetos compostos hierarquicamente

3
MGattass Hieraquia de movimentos

4
MGattass Transformações em 3D (translações e escalas) x y z 1 0 1 0 0 0 0 1 0 txtx tyty tztz 1 y z 1 x = 1 0 0 0 x y z x y z 1 0 sysy 0 0 0 0 szsz 0 0 0 0 1 y z 1 x = sxsx 0 0 0
 x y z txtx tyty tztz 1 y z 1 x = x y z x y z 1 0 sysy szsz y z 1 x = sxsx 0 0 0")
5
MGattass Rotação em torno do eixo y x y z y z x y

6
MGattass Rotação em torno do eixo x x y z x

7
MGattass Rotação em torno do eixo z x y z z

8
MGattass Rotações em torno dos eixos cartesianos x y z x y z

9
MGattass Instanciação de objetos braço ante-braço x y z 1 1 1

10
MGattass Ordem das transformações x y R x y T x y R x y x y T (a) (b)
 (b)")
11
MGattass Composição com sistema local móvel x,x L y,y L xLxL yLyL TLTL x y p 2 = R T pp 1 = T p e p 2 = R p 1 x T R y xx yy p= R p e p 2 = T L p p 2 = R T p ou p2p2 x yLyL x y xLxL R p p p 2 = R T R -1 R p

12
MGattass Instâncias de objetos x2x2 y z2z2 xz y2y2 x4x4 y4y4 z4z4 x6x6 x1x1 y1y1 z1z1 x3x3 y3y3 z3z3 x5x5 z5z5 y5y5 d1d1 d2d2

13
MGattass x2x2 y z2z2 xz y2y2 x4x4 y4y4 z4z4 x1x1 y1y1 z1z1 x3x3 y3y3 z3z3 x5x5 z5z5 y5y5 d1d1 d2d2 baseI ante-braçoR y R z1 T y1 cotoveloR y R z1 T y1 T y2 braçoR y R z1 T y1 T y2 R z3 T y3 pulsoR y R z1 T y1 T y2 R z3 T y3 T y3 mãoR y R z1 T y1 T y2 R z3 T y3 T y3 R z5 OpenGL:

14
x2x2 y z2z2 xz y2y2 x4x4 y4y4 z4z4 x1x1 y1y1 z1z1 x3x3 y3y3 z3z3 x5x5 z5z5 y5y5 d1d1 d2d2 Desenha a base; Roda em y; Roda em z 1 ; Translada em y 1 de d 1 /2; Desenha o ante-braço; Translada em y 2 de d 1 /2; Desenha cotovelo; Roda em z 3 ; Translada em y 3 de d 2 /2; Desenha o braço; Translada em y 3 de d 2 /2; Desenha o pulso; Roda em z 5 ; Desenha a mão;

15
MGattass Hierarquia em árvore base braço direitobraço esquerdo

16
MGattass Hierarquia em árvore x5x5 y5y5 y6y6 y7y7 y8y8 y9y9 x6x6 x7x7 x8x8 x9x9 a b c d eef a palma base dos dedos dedo direitodedo esquerdo

17
y7y7 y8y8 y9y9 x7x7 x8x8 x9x9 a b c e ef void desenhaDedos(float b,float c, float e, float f ) { /* dedo esquerdo */ glPushMatrix(); /* Salva matriz corrente C 0 */ glTranslatef((f+e)/2,(b+c)/2,0.); /* C=CT esq */ glScalef(e,c,e); /* C=CS */ glutSolidCube(1.0); glPopMatrix(); /* Recupera da pilha C=C 0 */ /* dedo direito */ glPushMatrix(); /* Salva matriz corrente C 0 */ glTranslatef(-(f+e)/2,(b+c)/2,0.); /* C=CT dir */ glScalef(e,c,e); /* C=CS */ glutSolidCube(1.0); glPopMatrix(); /* Recupera da pilha C=C 0 */ }
 { /* dedo esquerdo */ glPushMatrix(); /* Salva matriz corrente C 0 */ glTranslatef((f+e)/2,(b+c)/2,0.); /* C=CT esq */ glScalef(e,c,e); /* C=CS */ glutSolidCube(1.0); glPopMatrix(); /* Recupera da pilha C=C 0 */ /* dedo direito */ glPushMatrix(); /* Salva matriz corrente C 0 */ glTranslatef(-(f+e)/2,(b+c)/2,0.); /* C=CT dir */ glScalef(e,c,e); /* C=CS */ glutSolidCube(1.0); glPopMatrix(); /* Recupera da pilha C=C 0 */ }")
18
MGattass Algebra da rotação em torno de um eixo unitário ê x y z

19
MGattass Rotação em torno de um eixo ê x y z

20
MGattass A coluna da matriz é a transformada dos vetores da base

21
MGattass Matriz da rotação em torno de um eixo ê x y z

22
MGattass Matriz de rotação em torno de um eixo

23
MGattass Demonstração de:

24
MGattass Transformações em 3D (rotação em torno de um eixo qualquer) x y z 1 m 12 m 22 m 32 0 m 13 m 23 m 33 0 0 0 0 1 y z 1 x = m 11 m 21 m 31 0 x y z m 11 = e x 2 + cos (1- e x 2 ) m 12 = e x e y (1-cos ) - e z sen m 13 = e z e x (1-cos ) + e y sen m 21 = e x e y (1-cos ) + e z sen m 22 = e y 2 + cos (1- e y 2 ) m 23 = e y e z (1-cos ) - e x sen m 31 = e x e z (1-cos ) - e y sen m 32 = e y e z (1-cos )+ e x sen m 22 = e z 2 + cos (1- e z 2 )
 x y z 1 m 12 m 22 m 32 0 m 13 m 23 m y z 1 x = m 11 m 21 m 31 0 x y z m 11 = e x 2 + cos (1- e x 2 ) m 12 = e x e y (1-cos ) - e z sen m 13 = e z e x (1-cos ) + e y sen m 21 = e x e y (1-cos ) + e z sen m 22 = e y 2 + cos (1- e y 2 ) m 23 = e y e z (1-cos ) - e x sen m 31 = e x e z (1-cos ) - e y sen m 32 = e y e z (1-cos )+ e x sen m 22 = e z 2 + cos (1- e z 2 )")
25
MGattass Fórmula de Rodrigues 1

26
MGattass Fórmula de Rodrigues 2

27
MGattass Matriz de rotação em torno de um eixo ê que não passa pela origem x y z x y z p0p0 p0p0 x y z p0p0 M x y z p0p0

28
MGattass Interface para rotações tipo ArcBall

29
MGattass Rotação do ArcBall

30
MGattass Conservativo

31
MGattass 90° + 90° Complexidade da Rotação Giroscópio

33
MGattass Yaw-Pitch-Roll x z y - yaw - pitch - roll

34
MGattass Ângulos de Euler l Transforma x-y-z em x-y-z em 3 passos Rotação yaw de em torno eixo z Rotação pitch de em torno do eixo Rotação de em torno do eixo

35
MGattass Ângulos de Euler l Transforma x-y-z em x-y-z em 3 passos Rotação de em torno eixo z Rotação de em torno do eixo

36
MGattass x z y

37
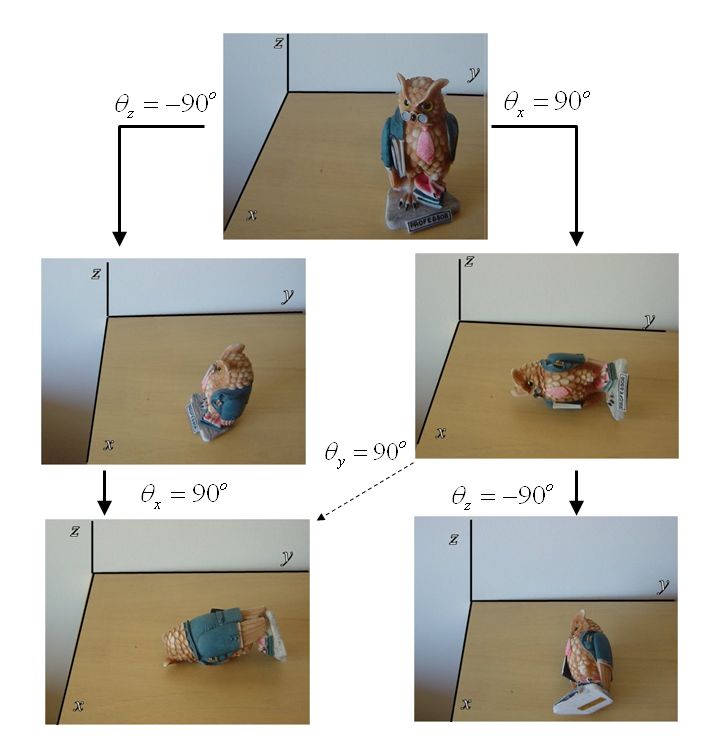
Parametrização de rotações: Ângulos de Euler x x y z y x y z z x y z

38
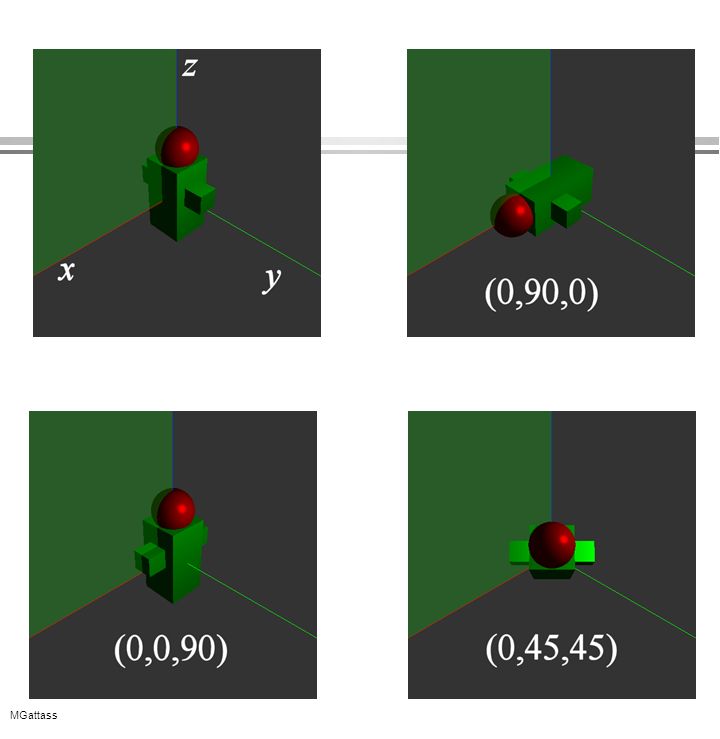
MGattass Ângulos de Euler Gimbal lock

39
MGattass Ângulos de Euler Gimbal lock x x y z y =90 o x y z z x y z

40
Interpolação não gera posições entre

41
MGattass Quatérnios

42
MGattass Soma e multiplicação por escalar

43
MGattass Produto de dois quatérnios

44
MGattass Produto de dois quatérnios(cont.)
")
45
MGattass Conjugado, normas e produto interno conjugado de um quatérnio norma de um quatérnio produto interno de dois quatérnios norma euclidiana

46
MGattass Quatérnio inverso e unitário inverso de um quatérnio unitário de um quatérnio

47
MGattass Quatérnios e rotações Dada uma rotação definida por um eixo ê e um ângulo construímos o quatérnio unitário: Dado um ponto qualquer p do R 3 construímos o quatérnio: Calculamos o produto:

48
MGattass Demostração …

49
MGattass Composição de rotações seguida de

50
MGattass Composição de rotações

51
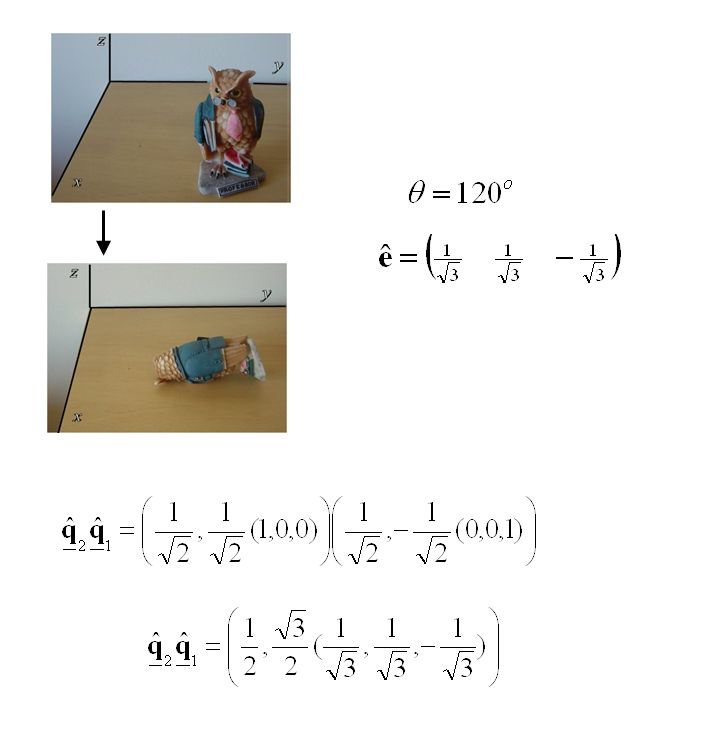
Exemplo

53
MGattass Interpolação de quatérnios não é unitário não representa rotação

54
MGattass Interpolação de quatérnios (1-t) t
 t")
55
MGattass

57
Quatérnios e matrizes

58
MGattass Matrizes e quatérnios

59
MGattass Matriz de rotação em torno de um eixo

60
MGattass Demonstração de

61
MGattass Transformação de normais x y x y s x =0.5 x y

62
MGattass FIM

Apresentações semelhantes