Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Algoritmos Genéticos aula 2 - exemplos

2
Caixeiro viajante Exemplos de programa

3
Caixeiro viajante representação intuitiva: o próprio caminho
problema: crossover D E B A H G F I C

4
Exemplo: recombinação de 2 pontos
1 2 A B C D E F G H I A B C H G F I D E B A H G F I C D E B F G I C

5
PMX crossover (partially mapped)
1 2 A B C D E F G H I x A H G F D E B A H G F I C x D E F G 3 4 x B C A H G F I D B C A H G F E I x B D E F G I C A H B D E F G I C

6
OX crossover (ordered)
1 2 A B C D E F G H I x A H G F D E B A H G F I C x D E F G 3 C D E A H G F I B 3- partindo do segundo ponto de quebra, as cidades do outro pai são copiadas na mesma ordem, omitindo as cidades já presentes no filho B A H D E F G I C

7
exemplos de mutação inversão: de duas cidades adjacentes
inserção: seleciona uma cidade e a coloca aleatoriamente em algum ponto deslocamento: seleciona um sub-percurso e o coloca aleatoriamente em algum ponto troca recíproca: troca de posição entre duas cidades

8
2opt method AB e CD fazem parte do percurso
se AB + CD > AC + BD então faço a troca para AC e BD C A B D A C B D

9
Trabalho de Jorge Meinhardt
“O presente trabalho pretende mostrar a possibilidade de uso de uma ferramenta de inteligência artificial utilizando a abordagem de algoritmo genético para auxílio ao projeto altimétrico de rodovias.”

10
exemplo: robocup p/ melhorar o drible, para melhorar a condução da bola, etc...

11
An Evolutionary Behavior Tool for Reactive Multi-agent Systems
Andre Zanki Cordenonsi Centro Universitário Franciscano Área de Ciências Exatas Rua dos Andradas 1614 Centro - Santa Maria – RS CEP Luis Otávio Alvares Universidade Federal do Rio Grande do Sul Instituto de Informática Av. Bento Gonçalves, Bairro Agronomia - Porto Alegre - RS -Brasil CEP Caixa Postal: 15064

12
Topics Introduction Artificial Life The Simula++ Genetic Operators
Food Foraging Problem Final Considerations and Further Works

13
1. Introduction Multi-agent Systems: “intelligent” autonomous agents
Reactive Multi-agent Systems: the perception/action approach Evolutionary Reactive Multi-agent Systems: agents can modify their behavior by a genetic evolutionary process

14
1. Introduction (…) Why to use an Evolutionary Reactive Multi-agent Systems ? adaptation to dynamically environments adaptation to unknown environments Objective of this paper: shows the specification and implementation of an Evolutionary Reactive Multi-agent Systems where the behavior of the agents can be modified during the simulation

15
1. Introduction (…) Previous work: the Simula Tool! [Frozza]
A graphical tool to teach the multi-agent technology developed in the Instituto de Informática – UFRGS by Rejane Frozza and Luis Otávio Alvares A tool to simulate reactive multi-agent systems, using a graphical interface to build the agents behavior and to shows the simulation.
![1. Introduction (…) Previous work: the Simula Tool! [Frozza]](http://slideplayer.com.br/slide/359330/2/images/15/1.+Introduction+%28%E2%80%A6%29+Previous+work%3A+the+Simula+Tool%21+%5BFrozza%5D.jpg "A graphical tool to teach the multi-agent technology developed in the Instituto de Informática – UFRGS by Rejane Frozza and Luis Otávio Alvares. A tool to simulate reactive multi-agent systems, using a graphical interface to build the agents behavior and to shows the simulation.")
16
2. Artificial Life What is life ? The subject of : - Philosophy
- Biology - Chemistry - History - …

17
2. Artificial Life (…) - … and Computer Science !
The Artificial Life IS : “ the understanding of life through the abstraction of its fundamental dynamic principles, and to create such dynamics in another physical medias, such as the computers ” Chistopher Langton

18
2. Artificial Life (…) The Emergent Behavior
Complex/Organized behavior formed by the simple/local interactions among the agents Ex: ant colonies, assembly of cells

19
3. The Simula ++ Reactive Multi-agent Systems Didactic tool
Graphical User Interface

20
3. The Simula ++ (…) Class of agents and the Behavior Initial State
Rule A Rule B Rule C Agent 00 Rule A Rule B Rule C Agent 01 Rule A Rule B Rule C Class X Rule A Rule B Rule C Agent 02 Initial State

21
3. The Simula ++ (…) Each Agent has - Set of Independent Elements
- Chromosome ( set of rules )
")
22
3. The Simula ++ (…) Independent Elements ( equal for all agents of the same class ) - Initial Energy - Energy Amount - Maximum Life Time - Life Time - Sexual Maturity Time - New Generation Time

23
3. The Simula ++ (…) Chromosome: the rule characteristics
- declarative - precondition - action - priority RULE A priority = 7 if (not perceive agent A) then random_move();
 then. random_move();")
24
3. The Simula ++ (…) The new Generation Algorithm LT > SMT
reach NGT yes no no no yes LT == SMT Execute Action yes Insert Agent Fertile Agents New Offspring !

25
4. Genetic Operators One-Point External Crossover Two-Point External Crossover Agent 00 Agent 01 Agent 00 Agent 01 Rule A Rule E Rule A Rule E Rule B Rule F Rule B Rule F Rule C Rule G Rule C Rule G Offspring Offspring Rule A Rule A Rule F Rule F Rule G Rule C

26
4. Genetic Operators (…) Internal Crossover Agent 00 Offspring
IF perceive Agent A AND not perceive Agent B THEN random move IF is Load THEN search base Offspring IF perceive Agent A OR not perceive Agent B THEN random move Agent 01 IF is not Load THEN search base IF not perceive Agent A OR not perceive Agent B THEN search mine IF is not Load THEN search mine

27
4. Genetic Operators (…) Mutation - between 1% and 2%
- change pieces of a rule (respecting the semantic value) AND/OR Agent A, Agent B, Agent C, … perceive_agent, search_agent, escape_from_agent,…
 AND/OR. Agent A, Agent B, Agent C, … perceive_agent, search_agent, escape_from_agent,…")
28
5. Food Foraging Problem Collect all minerals from an unknown environment The environment is a grid ( 100 x 100 ) Base is fixed All agents known where is the base There are three mines, with 100 units of mineral

29
5. Food Foraging Problem (…)
It was defined six simulation groups: Petit Poucet I [Drougol] Petit Poucet II [Drougol] Petit Poucet III [Drougol] Dockers [Drougol] Evolutionary Group Standard Group

30
5. Food Foraging Problem (…)
Standard Group (evolved by the evolutionary algorithm) IF NOT perceive (Mine) AND NOT perceive (Robot) THEN random move IF NOT perceive (Mine) AND perceive (Robot) THEN follows (Robot) IF NOT perceive (Mine) AND reach (Robot) THEN flee (Robot) IF perceive (Mine) THEN load AND return to base AND leave (Mark Track) IF perceive (Mark Track) THEN follows(Mark Track) AND remove(Mark Track)
 IF NOT perceive (Mine) AND NOT perceive (Robot) THEN random move. IF NOT perceive (Mine) AND perceive (Robot) THEN follows (Robot) IF NOT perceive (Mine) AND reach (Robot) THEN flee (Robot) IF perceive (Mine) THEN load AND return to base AND leave (Mark Track) IF perceive (Mark Track) THEN follows(Mark Track) AND remove(Mark Track)")
31
5. Food Foraging Problem (…)
E Group S Group Simulation steps Number of Robots PP1 PP2 PP3 Doc. E S Time to collect all minerals 3351 5315 3519 1746 2303 2217 Minimum time to collect all minerals 1113 1607 1075 695 770 540 Number of Robots for the minimum time 64 98 87 84 95

32
6. Conclusions and Further Works
Visual Analysis of the agent behavior Discovery of new rules to know/unknown problems Rapid prototype of RMAS Paradigm change (use or not use the evolutionary algorithm)
")
33
6. Conclusions and Further Works (…)
Two fitness measure (global/local) Automatic statistics and graphics Implementation of different genetic operators
 Automatic statistics and graphics. Implementation of different genetic operators.")
34
Bibliography DROGOUL, A. De la Simulation Multi-Agents à la Résolution
Collective de Problèmes. Paris, France: Université Paris VI, 1993. Thèse de Doctorat. FROZZA, R. SIMULA – Ambiente para Desenvolvimento de Sistemas Multiagentes Reativos. Porto Alegre: CPGCC da UFRGS, 1997. Dissertação de mestrado.

35
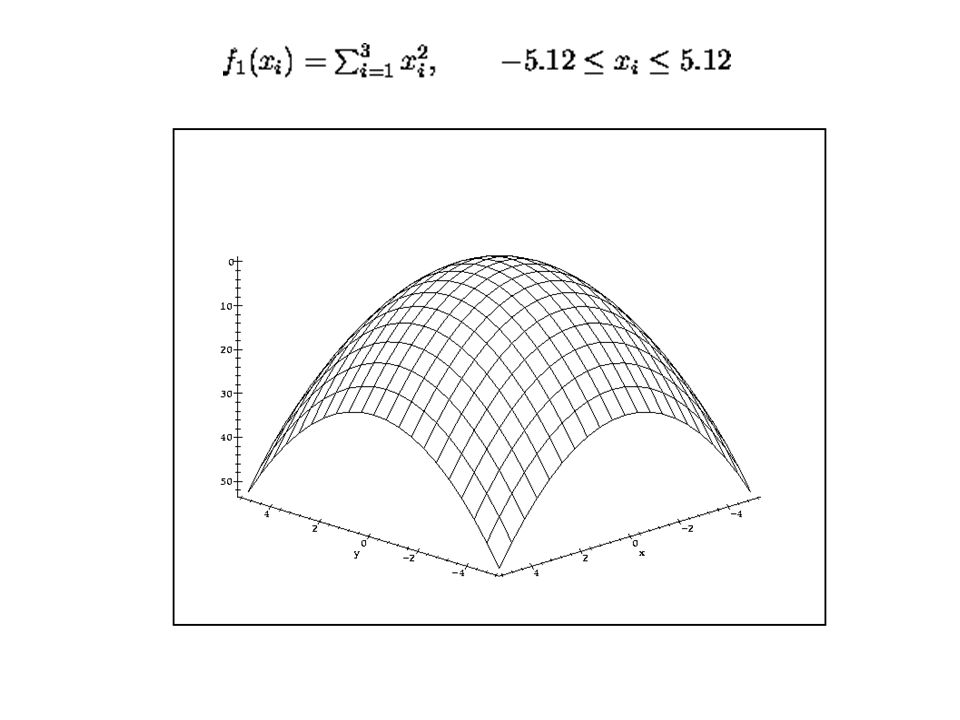
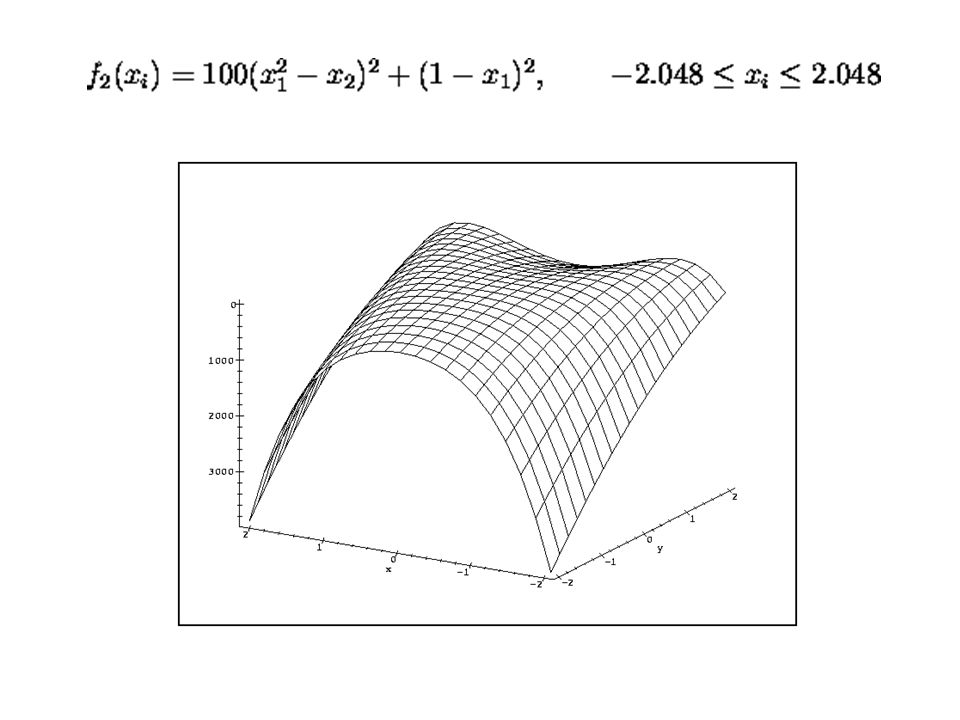
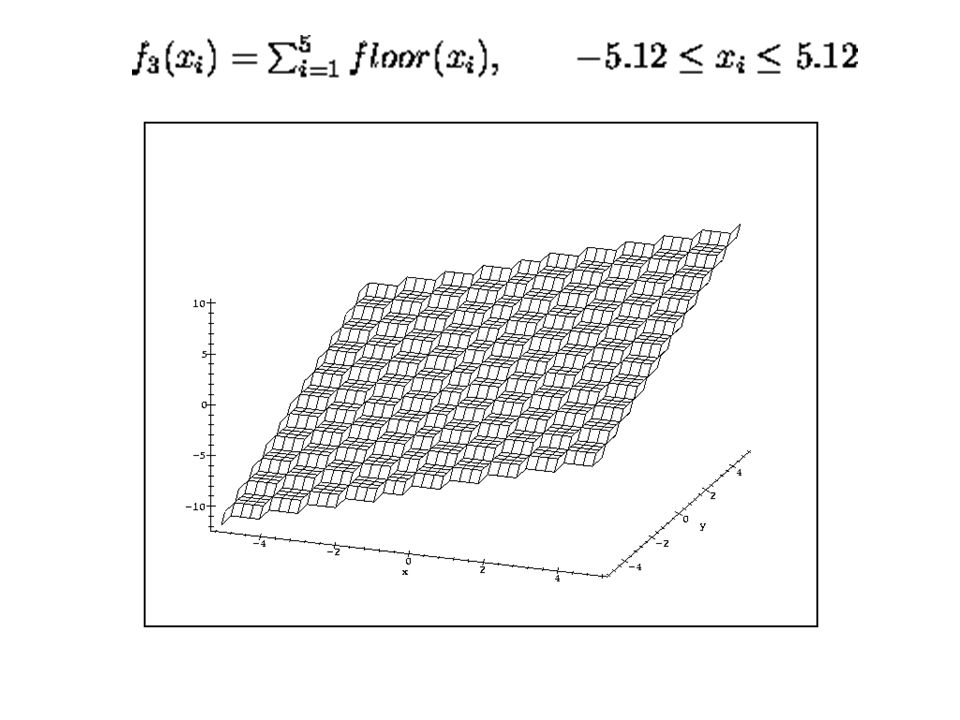
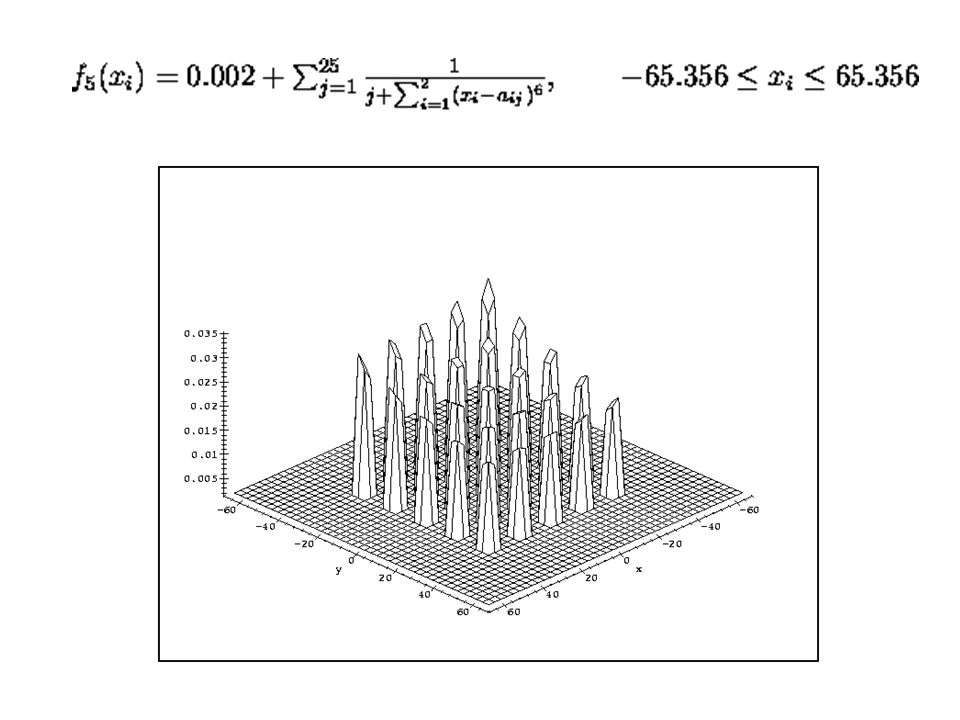
De Jong e Otimização de Funções
De Jong, em sua dissertação “An Analisys of The Behavior of a class of Genetic Adaptive Systems”,fez uma investigação cuidadosa de diversas variações do “algoritmo genético simples” aplicados à otimização de funções.

Apresentações semelhantes


 – Universidade Federal de Campina Grande (UFCG)EELA Grid School – December 04, 2006 Enhancing SegHidro/BRAMS.>")



: (based on and the message from INPAs General Director, Dr Adalberto Val, and on former.>")













