Carregar apresentação
A apresentação está carregando. Por favor, espere

1
SUPERVISÃO E CONTROLE OPERACIONAL DE SISTEMAS
Prof. André Laurindo Maitelli DCA-UFRN

2
INTRODUÇÃO

3
Automação no Dia-a-Dia
Em casa: Lavando roupa Lavando louça Esquentando o leite no microondas Na rua: Sacando dinheiro Fazendo compras

4
Automação no Dia-a-Dia

5
Introdução à Automação
Conjunto de técnicas destinadas a tornar automáticos vários processos na indústria, substituindo o trabalho muscular e mental do homem por equipamentos diversos Quantidade com qualidade e economia: Competitividade Início: Henry Ford (década de 20) - linha de produção de automóveis Avanço: microeletrônica (transistores - anos 60) Automação x desemprego
 - linha de produção de automóveis. Avanço: microeletrônica (transistores - anos 60) Automação x desemprego.")
6
Exemplo: Sistema Automatizado
LC LCV SP LE ligado desligado cheia vazia presente ausente motor da esteira garrafa válvula vazão saída vazão entrada

7
Objetivos da Automação
Qualidade: controle de qualidade eficiente, compensação automática de deficiências do processo, processos de fabricação sofisticados Flexibilidade: inovações freqüentes no produto, atendimento a especificidades do cliente, produção de pequenos lotes

8
Objetivos da Automação
Produtividade: produção de refugo zero, redução dos estoques Viabilidade Técnica: processamento imediato de grande volume de informações e/ou complexidade, limitações do homem, condições desumanas de trabalho

9
Tecnologias Disponíveis
Instrumentação Inteligente Instrumentação Virtual Computador no Processo Controlador Lógico Programável (CLP) Sistema Digital de Controle Distribuído (SDCD) Controle Supervisório e Aquisição de Dados (SCADA) Integração de Sistemas (Redes)
 Sistema Digital de Controle Distribuído (SDCD) Controle Supervisório e Aquisição de Dados (SCADA) Integração de Sistemas (Redes)")
10
Instrumentação Inteligente
Instrumentação inteligente é aquela à base de microprocessador Condiciona o sinal, no lugar do operador e apresenta informação de modo amigável Possui CPU Memória Módulo I/O

11
Instrumentação Inteligente
HART/Fieldbus Diagnósticos de Sensores, Dispositivos e Processo Estação de Operação Operações Status Cuidado Bom Mau ETR

12
Instrumentação Virtual
Camada de software, hardware ou de ambos, colocada em um computador de uso geral, para o usuário interagir com o computador como se fosse um instrumento convencional Instrumento personalizado feito dentro do computador através de software aplicativo

13
Instrumentação Virtual

14
Computador no Processo
Computador usado em controle para fazer: Aquisição de Dados Controle Seqüencial (CLP, SDCD ou supervisório ) Controle Lógico (CLP) Controle Distribuído (SDCD/DCS) Controle Supervisório Controle Supervisório e Aquisição de Dados (SCADA)
 Controle Lógico (CLP) Controle Distribuído (SDCD/DCS) Controle Supervisório. Controle Supervisório e Aquisição de Dados (SCADA)")
15
Computador no Processo

16
Aquisição de Dados Primeira aplicação usada pelo computador, ainda usada (e combinada com controle supervisório) Coleta de dados analógicos e digitais, em tempo real, para armazenagem e uso posterior: análise, indicação, registro, totalização, alarme, intertravamento e controle

17
Aquisição de Dados

18
Controlador Lógico Programável CLP
Sistema digital (1969) introduzido para substituir relés eletromecânicos Sistema programável Aplicado a controle lógico ou discreto Grande capacidade de coletar dados e condicionar sinais Não possui(a) interface homem-máquina
 introduzido para substituir relés eletromecânicos. Sistema programável. Aplicado a controle lógico ou discreto. Grande capacidade de coletar dados e condicionar sinais. Não possui(a) interface homem-máquina.")
19
CLP

20
Sistema Digital de Controle Distribuído
Sistema (1974) introduzido para substituir painéis de controle convencionais, centralizando tarefas e distribuindo funções Sistema configurável Aplicado a controle contínuo Possui IHM poderosa e amigável
 introduzido para substituir painéis de controle convencionais, centralizando tarefas e distribuindo funções. Sistema configurável. Aplicado a controle contínuo. Possui IHM poderosa e amigável.")
21
Sistema Digital de Controle Distribuído - SDCD

22
CLP x SDCD CLP SDCD CLP/ 1970 – Funcionalidades divergentes abismo
Aplicações em controle discreto Aplicações em controle contínuo abismo 1980 – Funcionalidades comuns Espaço 1990 – Funcionalidades superpostas 2000 – Funcionalidades convergentes CLP/ CLP x SDCD

23
Sistemas SCADA

24
Definição Os sistemas SCADA (Supervisory Control And Data Acquisition) começaram a ser idealizados desde a primeira metade do século XX, com a necessidade de obtenção de dados meteorológicos em grande volume Atualmente eles estão sendo largamente utilizados na indústria, principalmente aquelas cujos processos são geograficamente muito distribuídos
 começaram a ser idealizados desde a primeira metade do século XX, com a necessidade de obtenção de dados meteorológicos em grande volume. Atualmente eles estão sendo largamente utilizados na indústria, principalmente aquelas cujos processos são geograficamente muito distribuídos.")
25
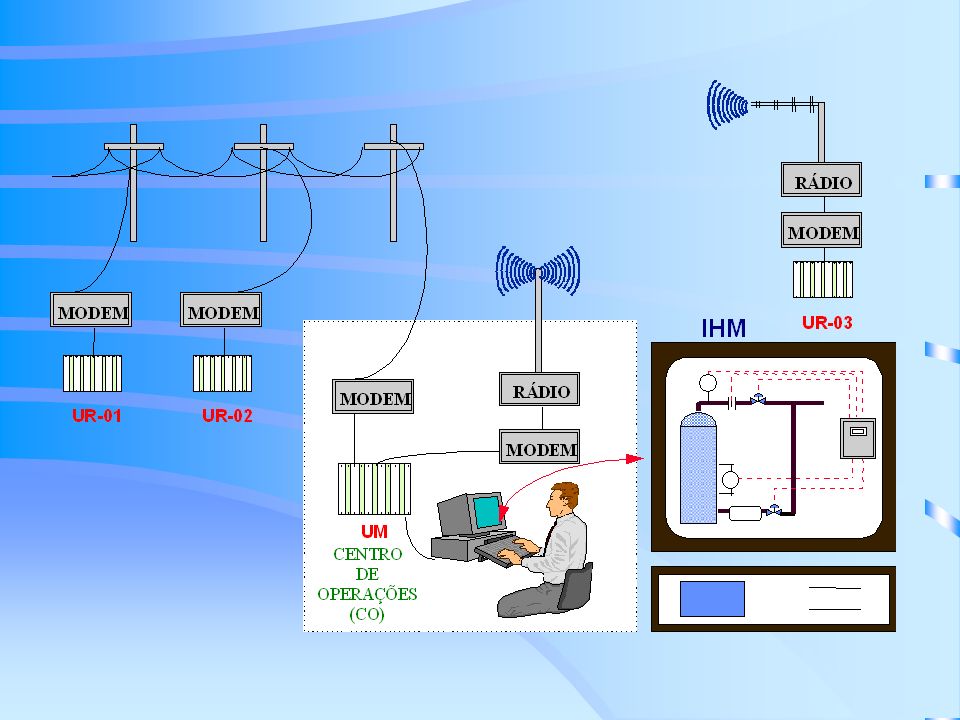
Componentes Básicos Centro de Operações (CO) com uma Unidade Mestre (UM), que interage com as URs e uma Interface Homem-Máquina (IHM) baseada em computador Uma ou mais Unidades Remotas (URs) que interagem diretamente com os processos Sistema de comunicação que permite a troca de informações entre o CO e as URs
 com uma Unidade Mestre (UM), que interage com as URs e uma Interface Homem-Máquina (IHM) baseada em computador. Uma ou mais Unidades Remotas (URs) que interagem diretamente com os processos. Sistema de comunicação que permite a troca de informações entre o CO e as URs.")
27
Componentes Computador(es) principais (host computers)
Rede(s) de Área Local Estação Mestre Modem(s) Mestre(s) Rede(s) de Telemetria Modem(s) Remoto(s) Estações Remota(s)
 de Área Local. Estação Mestre. Modem(s) Mestre(s) Rede(s) de Telemetria. Modem(s) Remoto(s) Estações Remota(s)")
28
Computadores Host Um ou mais computadores host podem se comunicar com a estação mestre através de uma rede de conexão local Os computadores host rodam um software de Interface Homem-Máquina (IHM) que tipicamente exibe, registra, soa alarmes e relata os dados coletados pela estação mestre Computadores host podem também ser configurados para inicializar ações de controle para as estações remotas via a estação mestre
 que tipicamente exibe, registra, soa alarmes e relata os dados coletados pela estação mestre. Computadores host podem também ser configurados para inicializar ações de controle para as estações remotas via a estação mestre.")
29
Projeto de um Sistema SCADA
Rede de Telemetria: topologia de conexão modo de transmissão meio de ligação protocolo de comunicação Modems Estação Mestre Estações Remotas

30
Rede de Telemetria topologia de conexão modo de transmissão
meio de ligação protocolo de comunicação

31
1- Topologia de Conexão Ponto-multiponto: Ponto-a-ponto
mais que dois modems particionam um canal de comunicação comum Ponto-a-ponto entre dois modems (tal como com modems de discagem) ou uma combinação de ambos
 ou uma combinação de ambos.")
32
2- Modo de Transmissão Linhas de transporte: Atmosfera Dial-up Leased
Rádio Microondas Satélite

33
3- Meio de Ligação Semi-Duplo Duplo-Cheio
transmissão de dados em uma única direção por vez utilizada em conexão ponto-para-multiponto Duplo-Cheio dois dispositivos podem simultaneamente enviar e receber dados (duas direções) utilizada em conexão ponto-para-ponto
 utilizada em conexão ponto-para-ponto.")
34
4- Protocolo de Comunicação
É primariamente dependente da topologia de conexão, modo de transmissão e requerimentos de aplicação, tal como conexão com equipamentos existentes.

35
Modems O tipo de Modem a ser utilizado em uma aplicação é ditado pela escolha dos meios de comunicação Uma vez especificado o tipo de Modem (tal como por discagem ou por rádio), existem várias características e opções que variam de acordo com o fabricante: Modem por discagem Modem por linha dedicada Modem por rádio
, existem várias características e opções que variam de acordo com o fabricante: Modem por discagem. Modem por linha dedicada. Modem por rádio.")
36
Modems Podem ser usados tanto para aplicações ponto-para-ponto, como para aplicações ponto-para-multiponto A consideração principal para modems de rádio é a banda de freqüência que os mesmos vão operar Os usuários finais devem estar licenciados para operar um modem de rádio em uma localização particular com determinadas freqüências de rádio

37
Estação Mestre e Remotas
Processadores do tipo CLP e Software de Controle podem ser usados como estação mestre de um sistema SCADA A determinação de qual tipo de CLPs devem ser usados em uma estação mestre é baseada estritamente nos requerimentos necessários de memória (número de estações remotas que estão ligadas a cada estação mestre) No caso de estações remotas, também podemos utilizar processadores do tipo CLP
 No caso de estações remotas, também podemos utilizar processadores do tipo CLP.")
38
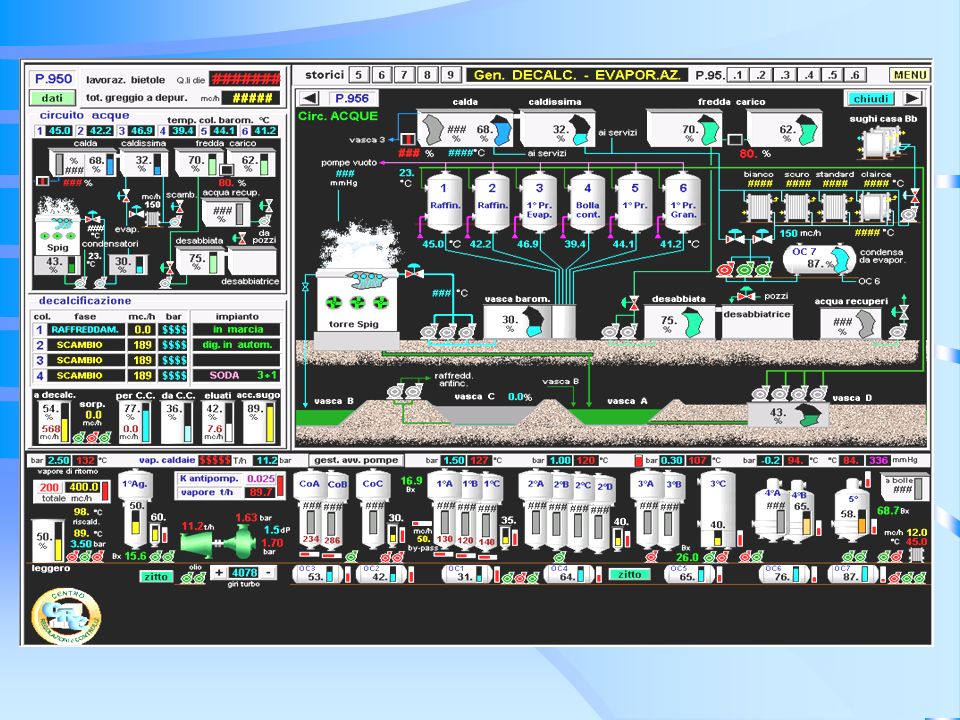
Sistemas Supervisórios
Permitem uma visualização gráfica com informações do processo por cores e animações Dão ao projetista um ampla gama de comunicação com os mais diversos tipos de marcas e modelos de equipamentos disponíveis no mercado

39
Sistemas Supervisórios

41
Integração de Sistemas
Contínuo Seqüencial Discreto Medição Gerência Corporativa Gerência de Produção Tempo Real Transacional Controle Gerência Industrial Integração de Sistemas Transacional Tempo Real

42
Integração de Sistemas
Interligar as várias ilhas de automação em único sistema para Coordenar as diferentes funções Compartilhar dados Compartilhar recursos Otimizar algumas funções Unir técnicas e negócios

43
Redes de Computadores Integram todo o conjunto de informações presentes na indústria Sistema distribuído é eficaz no compartilhamento de informações e recursos dispostos por um conjunto de máquinas processadoras Vários usuários podem trocar informações em todos os níveis dentro da fábrica

44
Componentes de uma Rede
Unidade de Processamento: onde é executado o software do usuário Sistema Especialista (gerenciador): composto por hardware (equipamento de rede, placa, etc) e software Meio Físico: linha transmissora de dados, podendo ser par trançado, coaxial ou fibra ótica. Outros: satélites, microondas
: composto por hardware (equipamento de rede, placa, etc) e software. Meio Físico: linha transmissora de dados, podendo ser par trançado, coaxial ou fibra ótica. Outros: satélites, microondas.")
45
Protocolo de Comunicação
Conjunto de regras, procedimentos e leis que governam a troca de informações entre dois ou mais processos, incluindo o formato e ações a serem executadas quando do envio e do recebimento destes dados

46
Protocolos Industriais
Vários protocolos de comunicação foram desenvolvidos pelos mais diferentes fabricantes de equipamentos industriais Mais conhecidos: Interbus Modbus Devicebus Fieldbus Profibus

47
Até a próxima aula !!!

Apresentações semelhantes
. All trademarks, trade names, services marks and logos referenced herein belong to their respective.>")


















