Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Aula Teorica 8 LUGAR GEOMETRICO DAS RAIZES
Adição de pólos e zeros ao LGR O Contorno das raízes O LGR de um sistema de segunda ordem variando razão de amortização Projecto de Controladores pelo metodo do LGR

2
A adição de pólos Efeitos de adicionar pólos e zeros ao GH
Em aulas posteriores aprenderemos a desenhar controladores usando o LGR e esse é um problema de modificar o lugar com adição de pólos e zeros por isso na aula de hoje veremos estes efeitos A adição de pólos (Explicaremos através de um exemplo) Considere a função LGR
 Considere a função. LGR.")
3
Se agora introduzir um polo aonde
Mudanças que se produzem: O ângulo das assíntotas troca de até A intercessão das assíntotas se move desde até sobre o eixo real Observe que O sistema antes era estável para qualquer valor de K Agora há um valor crítico de K que pode fazê-lo instável

4
Se agora introduzir um polo aonde
O ângulo das assíntotas troca até Concluindo A adição de pólos ao GH(s) tem o efeito de mover a porção dominante do LGR para a direita
 tem o efeito de mover a porção dominante do LGR para a direita.")
5
A adição de zeros (Explicaremos através de um exemplo)
Se sobre o mesmo sistema anterior colocamos agora um zero em As partes conjugadas do LGR se movem para as esquerda e formam um círculo

6
Se se colocarem um par de ceros complexos
Muito útil para desenhar PID Concluindo A adição de zeros ao GH(s) tem o efeito de mover a porção dominante do LGR para a esquerda
 tem o efeito de mover a porção dominante do LGR para a esquerda.")
7
variante 1 2 3 4 5 6 b 10 8 2 3 4 5 6 1 efeito de mover um pólo

8
variante 1 2 3 4 * a 5 0.5 0.2 efeito de mover um zero 2 3 1 4

9
Contorno das raízes Até agora so vimos o LGR variando um parâmetro somente No desenho de controladores muitas vezes terá que se analisar a variação de mais de um parâmetro Isso se chama Contorno das Raízes Suponha uma equação característica P e Q são polinômios K1 e K2 são parâmetros variáveis entre zero e infinito

10
O procedimento é Primeiro faz um dos dois parâmetros zero K2=0
Dividindo tudo por P Logo traça o LGR variando K1(0→α) e estabelece dentro do lugar o valor que deseja que tenha K1 Depois restaura o valor de K2 enquanto considera que K1 está fixo traça o LGR variando K2 (0→α) (Explicaremos através de um exemplo)
 e estabelece dentro do lugar o. valor que deseja que tenha K1. Depois restaura o valor de K2 enquanto considera que K1 está fixo traça o LGR variando K2 (0→α) (Explicaremos através de um exemplo)")
11
Considere que a equação característica de um sistema é:
onde K1 e K2 são os parâmetros variáveis Considere primeiro que K2 é zero e ficará

12
Suponha que escolhe um valor de K1 A equação é agora K1 é o valor que escolhemos (é um número) A seguir mostraremos o LGR e o CR com várias seleções de K1

13
1 2 3 3 Assim o pode ver mais claro se o obtiver no MATLAB 2 1 1 2 3

14
O LGR de um sistema de segunda ordem variando razão de amortização
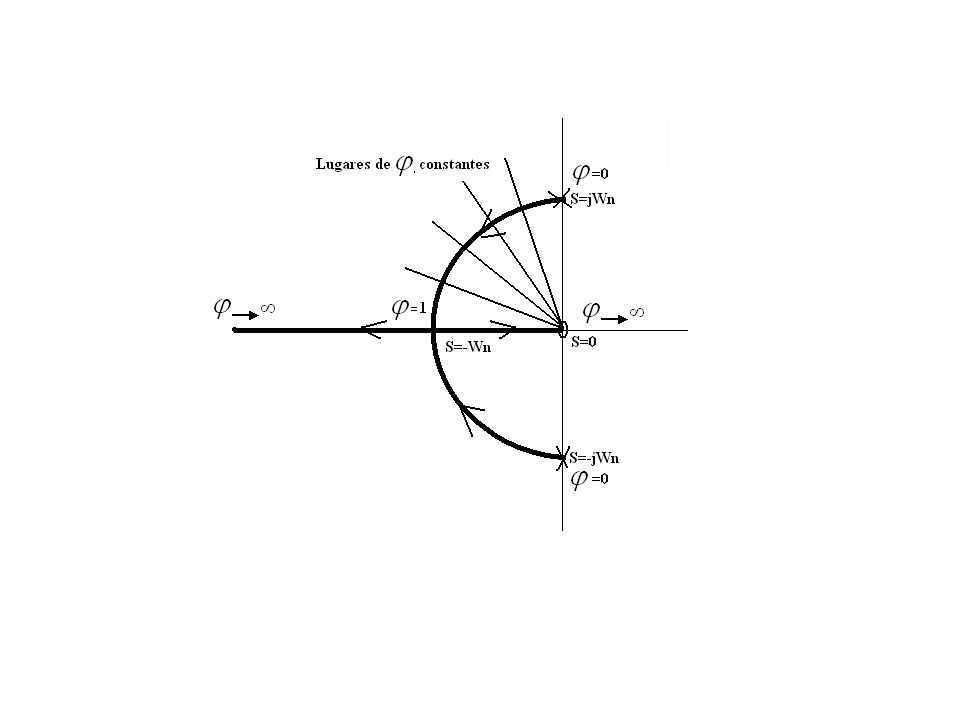
Um sistema de segunda ordem típica como este tem dois parâmetros que podem variar Analisemos a variação das raízes quando varia Arrumando para ter a forma

15
Esta é a equação com que faremos
o LGR com variando entre zero e infinito

16
zero polos LGR sobre o eixo real Número de ramos 2 Numero de assíntotas P-Z=1 em 180o

17
Ponto de chegada ao eixo real

18
LGR com variando entre zero e infinito Quanto vale aqui?

19
Substituindo o valor de S na equação de

22
Uma raiz complexa qualquer se pode representar assim sobre o lugar

23
Concluindo Este conteúdo é útil no desenho de controladores que posteriormente veremos Nunca faremos estes traços à mãos, aprenderemos a fazê-lo no MATLAB

24
Intervalo

25
Recordar que

26
Suponha graficamente

27
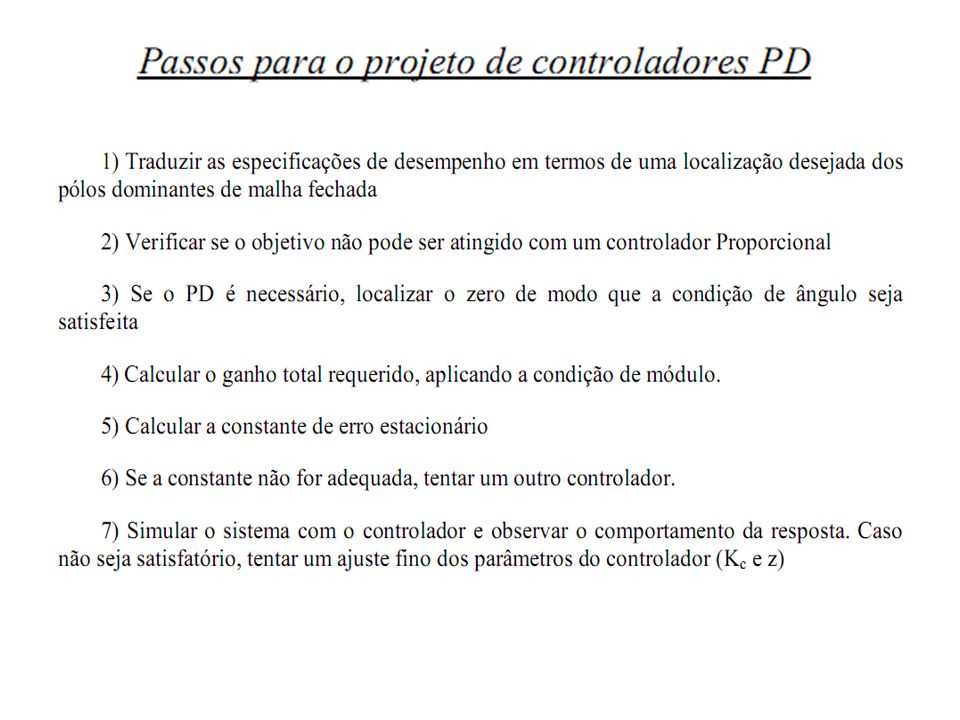
Observações importantes
Quando desejamos modificar o desempenho transitivo do sistema, as raízes da equação característica devem trocar portanto terá que modificar o LGR para que passe pelo ponto indicado conforme sejam as especificações Quando desejamos modificar o desempenho em estado estável, so utilizaremos o ganho do controlador sem variar muito o LGR

28
Projetar um PD é colocar adequadamente um zero
Só coloca um zero no LGR Projetar um PD é colocar adequadamente um zero

30
Estabelecimento ≥2.17

31
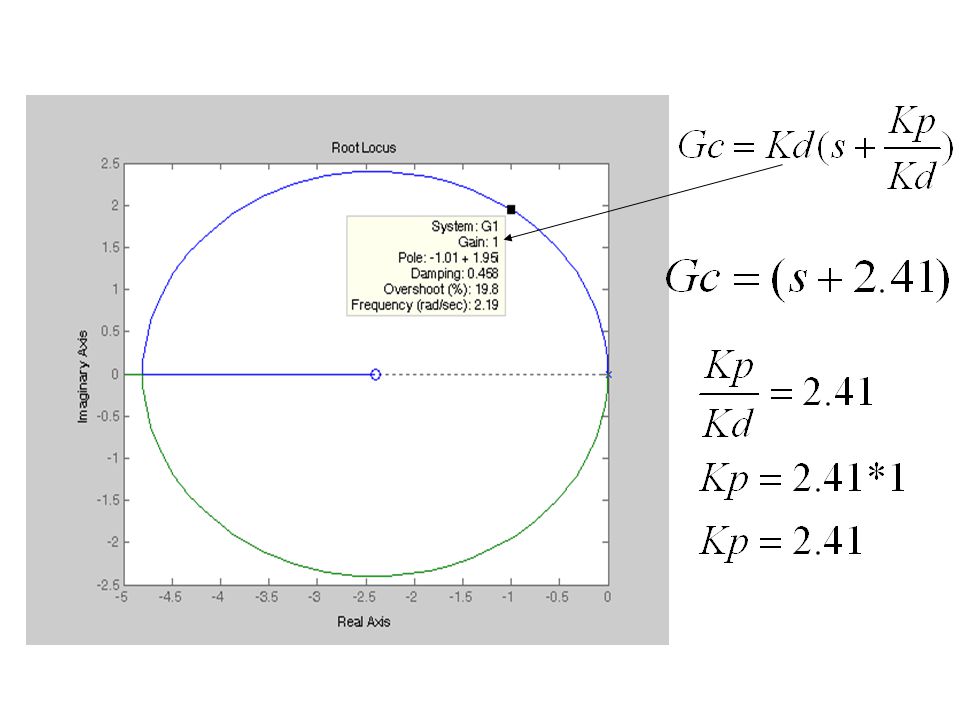
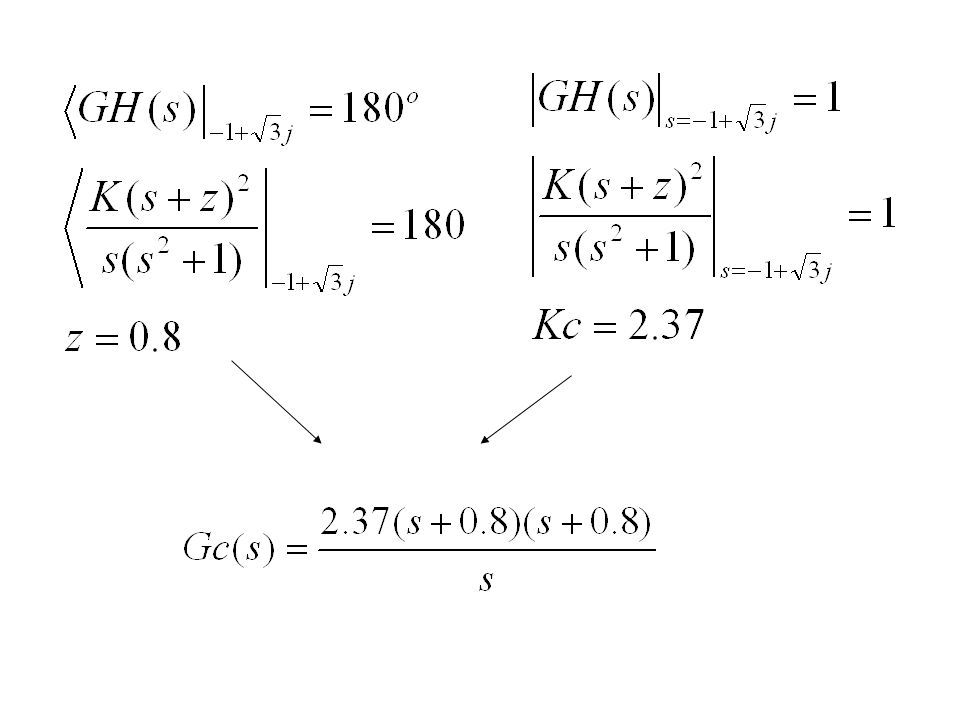
Aplicando a condição de fase
Que valor tomará Kc?

32
Aplicando a condição de magnitude
Agora

33
Como fazer isto com o Matlab?
G=tf(2,[1 0 0]) pd= *j angcero=pi+angle(pd^2) zero=imag(pd)/tan(angcero)-real(pd) para achar o zero G1=tf(2*[1 zero],[1 0 0]) rlocus(G1) para achar Kd
 pd= *j. angcero=pi+angle(pd^2) zero=imag(pd)/tan(angcero)-real(pd) para achar o zero. G1=tf(2*[1 zero],[1 0 0]) rlocus(G1) para achar Kd.")
35
Verificando se se satisfazem os requisitos
Não satisfaz Kd=1 Lc=feedback(Kd*G1,1) step(Lc)
 step(Lc)")
36
Aumentando Kc a um valor ligeiramente maior que 2
Aumentando Kc a um valor ligeiramente maior que 2.5 se obtêm os requisitos

37
Coloca um pólo na origem
e um zero em Sobre a origem não temos alternativas portanto o projeto se apóia em se localizar o zero

39
Tenha em conta que: Para que o estado transitório não se afete muito os pólos de laço fechado dominantes devem manter-se Quais são? Devido a que DEVEM MANTER-SE

40
Este é o LGR do sistema antes de pôr o PI

41
Agora O pólo do sistema está em - 2 portanto uma primeira aproximação pode ser colocar o zero do controlador em -0.2 LGR agora LGR antes Não passa por -1+j portanto se o deixarmos assim o comportamento transitório pode variar com respeito ao anterior

42
Uma segunda aproximação pode ser colocar o zero do controlador em -0.1
Agora Não se consegue acontecer exatamente por -1+j mas pode aceitar-se essa aproximação jou continuar afastando o zero LGR antes LGR agora

43
Resposta a entrada rampa
Ess=0

44
Resposta a entrada rampa
agora antes

45
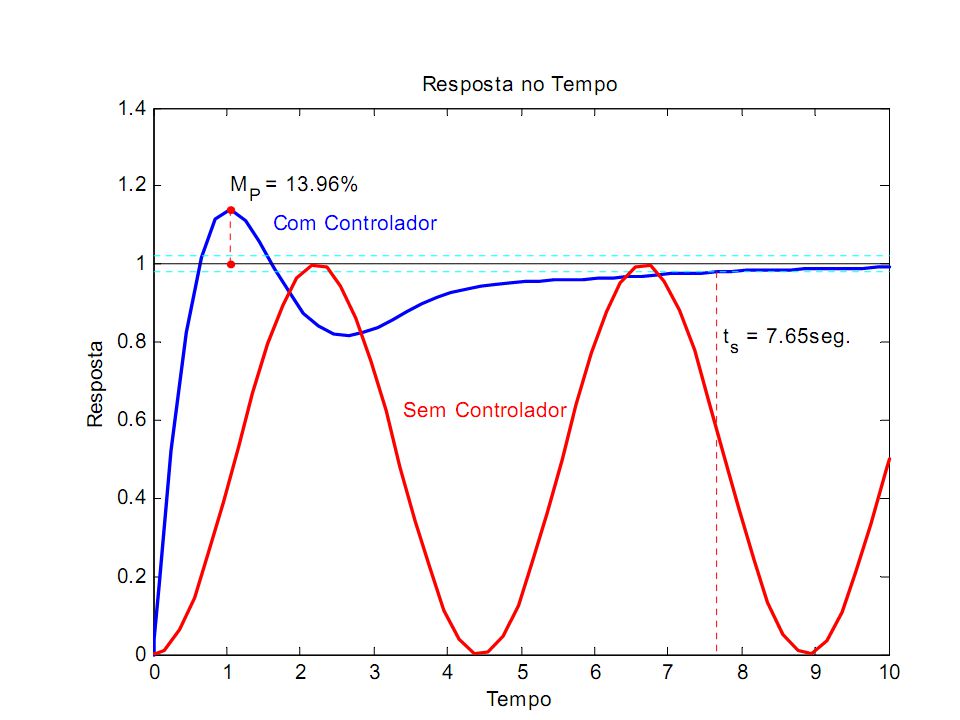
esta variação não é importante
resposta ao degrau unitário agora antes Se o mas importante era o zero erro em regime esta variação não é importante

46
Coloca um pólo na origem e dois zeros

48
Não é a única

51
Tragam os vossos computadores com MATLAB instalado
Em próxima atividade continuaremos com este tema mas em aula prática. Tragam os vossos computadores com MATLAB instalado

Apresentações semelhantes