Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Controle de Processos por Computador
UFOP Controle de Processos por Computador

2
Introdução à Automação Industrial
Elementos básicos de um sistema de automação Energia Elétrica Programa de instruções Seqüência de operações que devem ser realizadas em um ciclo de trabalho Exemplo: Carregamento de uma peça em uma máquina; processamento da peça; descarregamento Ajuste e verificação dos parâmetros (entradas) e variáveis (saídas observadas) de processo, respectivamente Tomada de decisões Interação com o operador
 e variáveis (saídas observadas) de processo, respectivamente. Tomada de decisões. Interação com o operador.")
3
Introdução à Automação Industrial
Sistema de controle Execução do programa de instruções Controle em malha aberta Controle em malha fechada Parâmetros de entrada Variáveis de saída Controlador Atuador Processo Parâmetros de entrada Variáveis de saída Controlador Atuador Processo Sensor de realimentação

4
Introdução à Automação Industrial
Funções de controle avançadas Monitoramento de segurança Chaves limite Sensores fotoelétricos Sensores de temperatura Sensores de pressão Visão computacional Diagnóstico de manutenção Monitoramento de status Diagnóstico de falhas Detecção de erros e recuperação Erros aleatórios Erros sistemáticos Erros absurdos Recuperação através da realização de ajustes ao término do ciclo de trabalho, ou durante o mesmo, dependendo da gravidade

5
Introdução à Automação Industrial
Níveis de automação Dispositivo Sensores e atuadores Máquinas Máquinas ferramentas Robôs industriais Células Equipamentos de manipulação de materiais Máquinas de processamento Planta MRP (Material Requirements Planning) Controle de chão de fábrica Controle de qualidade Empresa Marketing Pesquisa Agendamento mestre da produção (Master Production Scheduling)
 Controle de chão de fábrica. Controle de qualidade. Empresa. Marketing. Pesquisa. Agendamento mestre da produção (Master Production Scheduling)")
6
Sistemas de Controle Industriais
Controle contínuo Parâmetros e variáveis são contínuos Exemplo: Controle de posição de uma peça em relação uma máquina de usinagem Em geral, visa manter uma variável de saída em um valor desejado Controle discreto Parâmetros e variáveis são discretos As ações são realizadas em instantes discretos, podendo ser: Dirigidas por eventos Início de processamento de uma peça, cuja presença é detectada por uma chave limite Dirigida por tempo O tratamento térmico sobre uma peça metálica realizado durante um determinado intervalo de tempo

7
Abordagens de Controle de Processos por Computador
Monitoramento de processos Coleta de dados Controle digital direto (Direct Digital Control – DDC) Controle de diversas variáveis de saída através de um computador Multiplexadores Conversores AD e DA Computadores Novas funções de controle (tratamento de não-linearidades) Edição dos programas de controle Maior facilidade na atualização e modificação do sistema de controle
 Controle de diversas variáveis de saída através de um computador. Multiplexadores. Conversores AD e DA. Computadores. Novas funções de controle (tratamento de não-linearidades) Edição dos programas de controle. Maior facilidade na atualização e modificação do sistema de controle.")
8
Abordagens de Controle de Processos por Computador
Controle numérico (Numerical Control – NC) Controle da seqüência de passos de processamento Inclui o controle da posição de uma ferramenta em relação a um objeto (cálculo de trajetórias) Sistemas de controle distribuídos Múltiplas estações de controle de processos Estações de operadores locais distribuídas pela planta Sala de controle central Estações de operadores e de controle de processos interligadas por redes de comunicações
 Controle da seqüência de passos de processamento. Inclui o controle da posição de uma ferramenta em relação a um objeto (cálculo de trajetórias) Sistemas de controle distribuídos. Múltiplas estações de controle de processos. Estações de operadores locais distribuídas pela planta. Sala de controle central. Estações de operadores e de controle de processos interligadas por redes de comunicações.")
9
Abordagens de Controle de Processos por Computador
Estação de operador local Sala de controle central Estação de operador local Estação de controle de processo Estação de controle de processo Estação de controle de processo Material bruto Produto Processo

10
Componentes de Sistemas de Controle
Sensores Transdutores, que transformam diversas grandezas físicas (temperatura, pressão etc.) em sinais elétricos São utilizados para a medição de variáveis de processo Devem ser calibrados antes da utilização Características desejáveis Precisão Confiabilidade Baixo custo
 em sinais elétricos. São utilizados para a medição de variáveis de processo. Devem ser calibrados antes da utilização. Características desejáveis. Precisão. Confiabilidade. Baixo custo.")
11
Componentes de Sistemas de Controle
Sensores de temperatura Termopares (princípio físico do efeito de Seebeck)
")
12
Componentes de Sistemas de Controle
Termístores (semicondutores cuja resistência varia em função da temperatura) Aumento da temperatura
 Aumento da temperatura.")
13
Componentes de Sistemas de Controle
Sensores de luz Fotodiodo Diodo que conduz corrente elétrica na presença de luz Sensores de distância Ultra-som Sensores de movimento Fototacômetro (codificadores ópticos) Medição de velocidade Exemplo: Feixe de laser que atravessa um disco com orifícios e é detectado por uma célula fotoelétrica (geração de um trem de pulsos cuja freqüência é proporcional a velocidade de rotação do disco
 Medição de velocidade. Exemplo: Feixe de laser que atravessa um disco com orifícios e é detectado por uma célula fotoelétrica (geração de um trem de pulsos cuja freqüência é proporcional a velocidade de rotação do disco.")
14
Componentes de Sistemas de Controle
Sensores de pressão Piezoeletricidade (geração de corrente elétrica por cristais em resposta ao aumento de pressão mecânica) Sensores de posição potenciômetros
 Sensores de posição. potenciômetros.")
15
Componentes de Sistemas de Controle
Atuadores Realização de ações sobre o processo Tipos de atuadores Elétricos (motor de passos, motor de corrente contínua etc.) Hidráulicos São empregados para a aplicação de forças elevadas Pneumáticos São baseados em ar comprimido Adequados para aplicações que demandam forças relativamente menores (comparados aos atuadores hidráulicos)
 Hidráulicos. São empregados para a aplicação de forças elevadas. Pneumáticos. São baseados em ar comprimido. Adequados para aplicações que demandam forças relativamente menores (comparados aos atuadores hidráulicos)")
16
Componentes de Sistemas de Controle
Motor de passos Atuador de posicionamento As bobinas do estator são polarizadas alternadamente Pode ser unipolar (apresenta uma derivação entre o enrolamento de duas bobinas) ou bipolar
 ou bipolar.")
17
Componentes de Sistemas de Controle
Funcionamento do motor de passos de imã permanente unipolar

18
Componentes de Sistemas de Controle
Passo inteiro com polarização de apenas uma bobina Menor torque

19
Componentes de Sistemas de Controle
Passo inteiro com polarização de duas bobinas Maior torque

20
Componentes de Sistemas de Controle
Meio passo

21
Componentes de Sistemas de Controle
Exemplo: 25 dentes e 4 fases = 100 passos por volta 3,6º por passo

22
Componentes de Sistemas de Controle
Resumo sobre motor de passos de imã permanente unipolar Conversores A/D e D/A Utilizados no caso de controle digital

23
Componentes de Sistemas de Controle
Conversão AD Número de níveis de quantização = 2n, sendo n o número de bits do conversor Espaço de quantização ou resolução Erro de quantização Processo sensor entrada digital do computador AD condicionamento do sinal amplificador outros sinais multiplexador

24
Componentes de Sistemas de Controle
Método da aproximação sucessiva (exemplo 5.1) O número de comparações é igual ao número de bits do conversor A primeira tensão de comparação é igual metade do valor máximo da faixa de operação do conversor A segunda tensão de comparação é metade da primeira, e assim sucessivamente Se a diferença entre a tensão de entrada e a tensão de comparação for positiva, tem-se bit 1. Caso contrário, tem-se bit 0 Finalmente, os valores das tensões de comparação são multiplicados pelos respectivos bits a fim de verificar qual o valor decimal aproximado
 O número de comparações é igual ao número de bits do conversor. A primeira tensão de comparação é igual metade do valor máximo da faixa de operação do conversor. A segunda tensão de comparação é metade da primeira, e assim sucessivamente. Se a diferença entre a tensão de entrada e a tensão de comparação for positiva, tem-se bit 1. Caso contrário, tem-se bit 0. Finalmente, os valores das tensões de comparação são multiplicados pelos respectivos bits a fim de verificar qual o valor decimal aproximado.")
25
Componentes de Sistemas de Controle
Exercício: Um sinal contínuo deve ser digitalizado através de um conversor AD de 12 bits. A faixa de tensão é de 30V. Determine o número de níveis de quantização, a resolução e o erro de quantização Um sinal de tensão compreendido em uma faixa de 0-115V deve ser digitalizado por um conversor AD. Determine o número mínimo de bits necessários para a obtenção de erros de quantização de no máximo ±5V e ±1V Assumindo um sinal de entrada de 5.2V, utilize o método das aproximações sucessivas para codificar tal entrada a partir de um conversor AD de 8 bits e faixa de operação de 10V

26
Componentes de Sistemas de Controle
Conversão DA sendo Eref a tensão de referência do conversor, n o número de bits e E0 a saída analógica Exercício: Um conversor DA possui tensão de referência de 120V e 8 bits de precisão. Em um dado instante, o registrador apresenta a seqüência Qual a saída analógica correspondente ?

27
Introdução aos Sistemas de Controle
Objetivos de análise e de projeto Determinar a resposta transitória Determinar a resposta de estado estacionário Reduzir o erro de estado estacionário Garantir a estabilidade do sistema

28
Introdução aos Sistemas de Controle

29
Introdução aos Sistemas de Controle
Procedimento de projeto

30
Introdução aos Sistemas de Controle
Entradas utilizas para a análise de sistemas de controle

31
Modelagem no Domínio da Freqüência
A Transformada de Laplace é uma generalização da Transformada Contínua de Fourier, na qual a variável complexa “s” deve possuir parte real e imaginária A Transformada de Laplace de uma função f(t) é definida como
 é definida como.")
32
Modelagem no Domínio da Freqüência
Em sistemas de controle, assume-se que f(t) = 0 para t < 0. Então:
 = 0 para t < 0. Então:")
33
Modelagem no Domínio da Freqüência
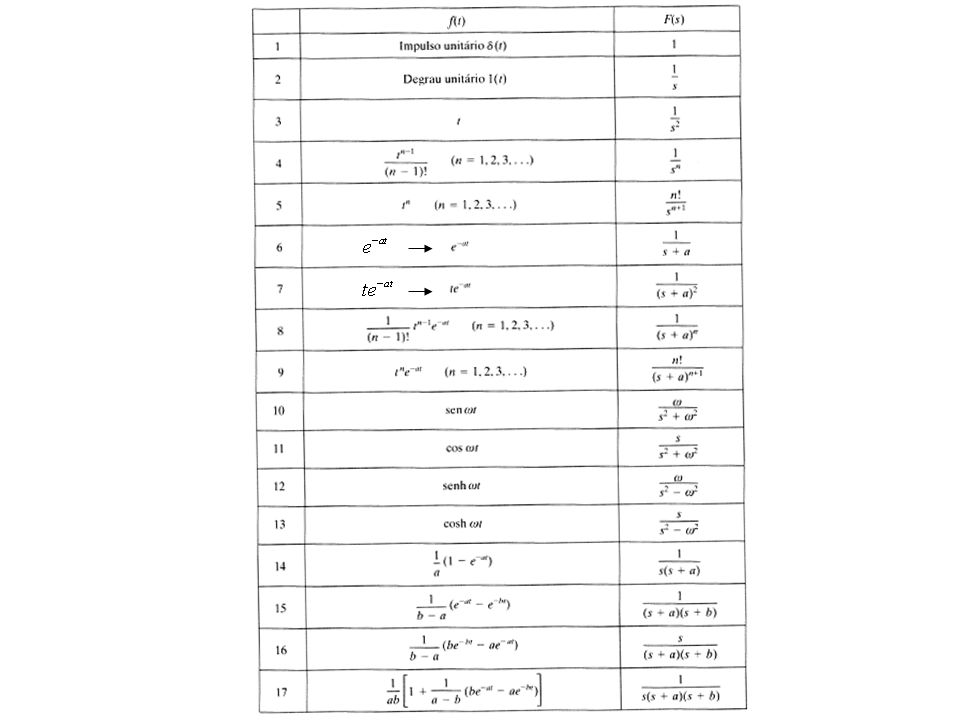
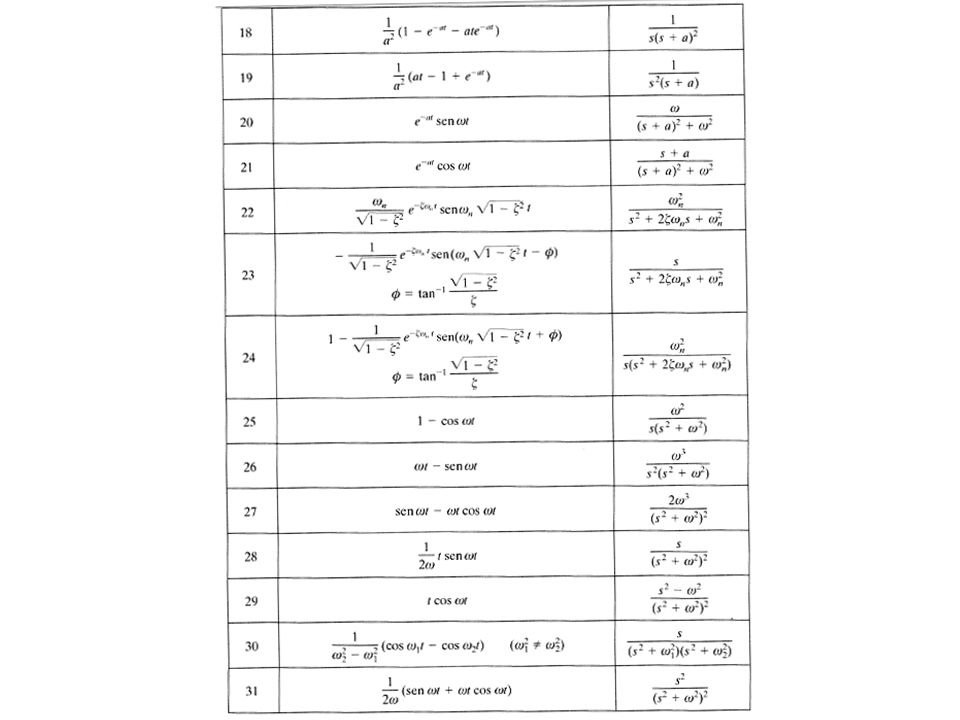
A transformada inversa de Laplace é definida por: As transformadas das funções mais comuns se encontram tabeladas

34
Modelagem no Domínio da Freqüência

35
Modelagem no Domínio da Freqüência

36
Modelagem no Domínio da Freqüência
Exercício: Obter a Transformada de Laplace de: f(t) = Ae-atu(t) Exercício Demonstrar o teorema da transformada da derivada de uma função f(t) (dica: efetuar integração por partes) Demonstrar o teorema da integração no tempo (dica: utilize o teorema acima)
 = Ae-atu(t) Exercício. Demonstrar o teorema da transformada da derivada de uma função f(t) (dica: efetuar integração por partes) Demonstrar o teorema da integração no tempo (dica: utilize o teorema acima)")
37
Modelagem no Domínio da Freqüência
Expansão em frações Pode ser utilizada para a obtenção da transformada de Laplace inversa, quando se tem uma expressão em “s” bastante complexa Raízes do denominador de F(s) reais e distintas
 reais e distintas.")
38
Modelagem no Domínio da Freqüência
Raízes do denominador de F(s) reais e repetidas Raízes do denominador de F(s) complexas
 reais e repetidas. Raízes do denominador de F(s) complexas.")
39
Modelagem no Domínio da Freqüência
Exercício: Determine a expansão em frações parciais da função Determine a transformada inversa de Laplace de F(s)
")
42
Modelagem no Domínio da Freqüência
Função de Transferência Transformada de Laplace de uma equação diferencial que relaciona as entradas e saídas de um sistema linear invariante no tempo

43
Modelagem no Domínio da Freqüência
Transformada de Laplace

44
Modelagem no Domínio da Freqüência
Representação em diagrama de blocos

45
Modelagem no Domínio da Freqüência
Funções de transferência de circuitos elétricos Utilização da Lei de Kirchhoff das tensões (somatório das quedas de tensão em uma malha igual a zero) e das correntes (somatório das correntes em um nó igual a zero)
 e das correntes (somatório das correntes em um nó igual a zero)")
46
Modelagem no Domínio da Freqüência
Relação entre tensões e correntes em componentes de circuito elétrico (resistor, capacitor e indutor)
")
47
Modelagem no Domínio da Freqüência
Tensão no capacitor Exemplo: Circuito RLC Tensão de entrada determinando a relação entre tensão de entrada e carga no circuito determinando a relação entre tensão de entrada e tensão no capacitor

48
Modelagem no Domínio da Freqüência
Continuação

49
Modelagem no Domínio da Freqüência
Exercício (exemplo 2.7): Repetir o exemplo anterior, porém utilizando a transformada de Laplace e impedâncias para a determinação da função de transferência
: Repetir o exemplo anterior, porém utilizando a transformada de Laplace e impedâncias para a determinação da função de transferência.")
50
Modelagem no Domínio da Freqüência
Generalização para circuitos complexos via método das malhas Substituir todos os elementos passivos pelas impedâncias correspondentes Substituir as fontes e variáveis no domínio do tempo pelas respectivas transformadas de Laplace Aplicar a lei de Kirchhoff das tensões em cada malha Resolver o sistema de equações em termos da saída desejada Obter a função de transferência

51
Modelagem no Domínio da Freqüência
Funções de transferência de sistemas mecânicos em translação

53
Modelagem no Domínio da Freqüência
Comparação entre os domínios elétrico e mecânico Tensão-Corrente x Força-Velocidade Corrente-Tensão x Força-Velocidade

54
Modelagem no Domínio da Freqüência
Analogia com circuitos elétricos Força mecânica ↔ Diferença de potencial elétrico (força eletromotriz) Deslocamento mecânico ↔ Carga elétrica Elementos passivos Amortecedor viscoso ↔ Resistor Mola ↔ Capacitor Massa ↔ Indutor A soma das forças escritas em função da velocidade, em sistemas mecânicos, é análoga a soma das quedas de tensão escritas em função da corrente, em circuitos elétricos (lei de Kirchhoff das tensões)
 Deslocamento mecânico ↔ Carga elétrica. Elementos passivos. Amortecedor viscoso ↔ Resistor. Mola ↔ Capacitor. Massa ↔ Indutor. A soma das forças escritas em função da velocidade, em sistemas mecânicos, é análoga a soma das quedas de tensão escritas em função da corrente, em circuitos elétricos (lei de Kirchhoff das tensões)")
55
Modelagem no Domínio da Freqüência
Outra possibilidade de analogia com circuitos elétricos Força mecânica ↔ Corrente elétrica Velocidade ↔ Diferença de potencial elétrico Elementos passivos Amortecedor viscoso ↔ Resistor Massa ↔ Capacitor Mola ↔ Indutor A soma das forças escritas em termos da velocidade, em sistemas mecânicos, é análoga a soma das correntes escritas em termos da tensão, em circuitos elétricos (lei de Kirchhoff das correntes)
")
56
Modelagem no Domínio da Freqüência
Exemplo:

57
Modelagem no Domínio da Freqüência
Exemplo: (dois graus de liberdade)
")
58
Modelagem no Domínio da Freqüência
Procedimento para a solução do problema Analisa-se um bloco de cada vez Considera-se inicialmente somente as forças associadas ao movimento do M1, enquanto M2 é mantido parado Considera-se depois somente as forças associadas ao movimento de M2 e que agem sobre M1 Na seqüência aplica-se o princípio da superposição para se obter o conjunto de forças atuantes sobre o bloco M1 Por fim, repete-se o procedimento para o outro bloco Obtém-se um sistema de equações lineares que pode ser resolvido para as variáveis de interesse

59
Modelagem no Domínio da Freqüência
Deseja-se encontrar a relação entre X2(s) e F(s): A partir do sistema de equações lineares abaixo, pode-se encontrar tal relação
 e F(s): A partir do sistema de equações lineares abaixo, pode-se encontrar tal relação.")
60
Modelagem no Domínio da Freqüência
Funções de transferência de sistema mecânico em rotação

61
Modelagem no Domínio da Freqüência
Exercício: Determine a função de transferência ɵ2(s) / T(s) do sistema físico indicado abaixo
 / T(s) do sistema físico indicado abaixo.")
62
Modelagem no Domínio da Freqüência
Solução:

63
Modelagem no Domínio da Freqüência
sendo Continuação

64
Modelagem no Domínio da Freqüência
Funções de transferência de sistemas eletromecânicos Estator Rotor Deseja-se determinar a relação entre o torque e a velocidade de rotação

65
Modelagem no Domínio da Freqüência
Em um motor de corrente contínua, tem-se na armadura: sendo vb(t) a força contra-eletromotriz contrária ao movimento do rotor dentro do campo magnético produzido pelo eletroímã estacionário do estator, em que
 a força contra-eletromotriz contrária ao movimento do rotor dentro do campo magnético produzido pelo eletroímã estacionário do estator, em que.")
66
Modelagem no Domínio da Freqüência
As duas equações apresentadas podem ser escritas em termos da transformada de Laplace: Sabendo-se que o torque produzido pelo motor é proporcional a corrente de armadura ia(t), tem-se:
, tem-se:")
67
Modelagem no Domínio da Freqüência
Substituindo as equações de Tm(s) e Vb(s) na equação do circuito da arqmadura, tem-se: Determinando o somatório dos torques sobre o motor, encontra-se Substituindo a equação acima na anterior, obtém-se:
 e Vb(s) na equação do circuito da arqmadura, tem-se: Determinando o somatório dos torques sobre o motor, encontra-se. Substituindo a equação acima na anterior, obtém-se:")
68
Modelagem no Domínio da Freqüência
Admitindo que Ra >> La, pode-se aplicar a seguinte simplificação: Logo a função de transferência desejada é:

69
Modelagem no Domínio da Freqüência
Observação: Deve-se notar que o momento de inércia total e o amortecimento viscoso total (motor + carga) são calculados por em que N1 e N2 correspondem ao número de dentes da engrenagem do motor e da carga, respectivamente
 são calculados por. em que N1 e N2 correspondem ao número de dentes da engrenagem do motor e da carga, respectivamente.")
Apresentações semelhantes