Carregar apresentação
A apresentação está carregando. Por favor, espere

1
CLP – Controlador lógico Programável

2
PLC – Programmable Logic Controllers

3
História O CLP - Controlador Lógico Programável tem a sua história desde 1960 e foi a maior revolução que ocorreu no mundo da eletrônica na área de automação industrial. Antes do surgimento dos CLPs as tarefas de comando e controle de máquinas e processos Industriais eram feitas por relés eletromagnéticos, especialmente projetados para este fim, o resultado era um volume considerável de dispositivos dispostos sobre painéis com grande espaço e pouca flexibilidade.

4
CLP/PLC

5
História O CLP nasceu praticamente dentro da indústria automobilística americana, especificamente na Hydronic Division da General Motors, em 1968, devido a grande dificuldade de se mudar a lógica de controle de painéis de comando a cada mudança na linha de montagem. Estas mudanças implicavam em altos gastos de tempo e dinheiro.

6
História Sob a liderança do engenheiro Richard Morley, foi preparada uma especificação que refletia os sentimentos de muitos usuários de relés, não só da indústria automobilística como de toda a indústria manufatureira. Nascia assim a indústria de controladores programáveis, hoje com um mercado mundial estimado em 4 bilhões de dólares anuais. No Brasil é estimado em 50 milhões de dólares anuais.

7
História Inicialmente, os CPLs eram chamados CP – controlador programável, mas com o advento dos Computadores Pessoais convencionou-se CLP para evitar conflitos de nomenclatura. Originalmente os CLPs foram usados em aplicações de controle discreto (on-off liga-desliga), como os sistemas a relés, porém eram facilmente instalados, economizando espaço e energia, alem de possuírem indicadores de diagnósticos o que facilitavam a manutenção. Uma eventual necessidade de adequação da lógica de controle da máquina era realizada em pouco tempo, apenas com mudanças no programa, sem necessidade de alterar à arquitetura elétrica.
, como os sistemas a relés, porém eram facilmente instalados, economizando espaço e energia, alem de possuírem indicadores de diagnósticos o que facilitavam a manutenção. Uma eventual necessidade de adequação da lógica de controle da máquina era realizada em pouco tempo, apenas com mudanças no programa, sem necessidade de alterar à arquitetura elétrica..")
8
História A década de 70 marca uma fase de grande aprimoramento dos CLPs. Com as inovações tecnológicas dos microprocessadores, maior flexibilidade e um grau também maior de aperfeiçoamento na sua eletrônica interna, os Controladores Lógicos Programáveis incorporam: 1972 - Funções temporização e contagem; 1973 - Operações aritméticas, manipulação de dados de comunicação com computadores; 1974 - Comunicação com interfaces homem-máquina, IHM; 1975 - Maior capacidade de memória,controle analógicos e controle PID; 1979 a 1981 - Módulos de I-O remotos, módulos com capacidade de controle de posicionamento;

9
História CLP da Modicon década de 80.

10
História Até recentemente não havia nenhuma padronização entre fabricantes, apesar da maioria utilizar as mesmas normas construtivas. Porém, pelo menos ao nível de software aplicativo, os controladores programáveis podem se tornar compatíveis com a adoção da norma IEC 1131-3, que prevê a padronização da linguagem de programação e sua portabilidade.

11
História Hoje os CLPs oferecem um considerável número de benefícios para aplicações Industriais, que podem ressaltar em economia que excede o custo do CLP e devem ser considerados quando da seleção de um dispositivo de controle industrial. As vantagens de sua utilização, comparados a outros dispositivos de controle industrial incluem:

12
História Menor Ocupação de espaço; Menor potência elétrica requerida; Reutilização; Maior confiabilidade; Maior flexibilidade, satisfazendo um maior número de aplicações; Número de condutores usados para interligar os sistemas de controle aos sensores e atuadores, além de propiciar a distribuição da inteligência por todo o processo. Permite a interface através de rede de comunicação com outros CLPs e microcomputadores; Menor tempo de projeto do sistema. Capacidade de operação em ambiente industrial. Hardware e/ou dispositivo de fácil controle e rápida programação ou reprogramação, com a mínima interrupção da produção.

13
História Sinalizadores de estados. Módulos do tipo plug-in de fácil manutenção e substituição. Possibilidade de monitoração do estado e operação do processo ou sistema, através da comunicação com computadores. Compatibilidade com diferentes tipos de sinais de entrada saída. Capacidade de alimentar, de forma contínua ou chaveada, cargas que consomem correntes de até 2 A. Hardware de controle que permite a expansão dos diverso tipos de módulos, de acordo com a necessidade. Custo de compra e instalação competitivo em relação aos sistemas de controle convencionais. Possibilidade de expansão da capacidade de memória.

14
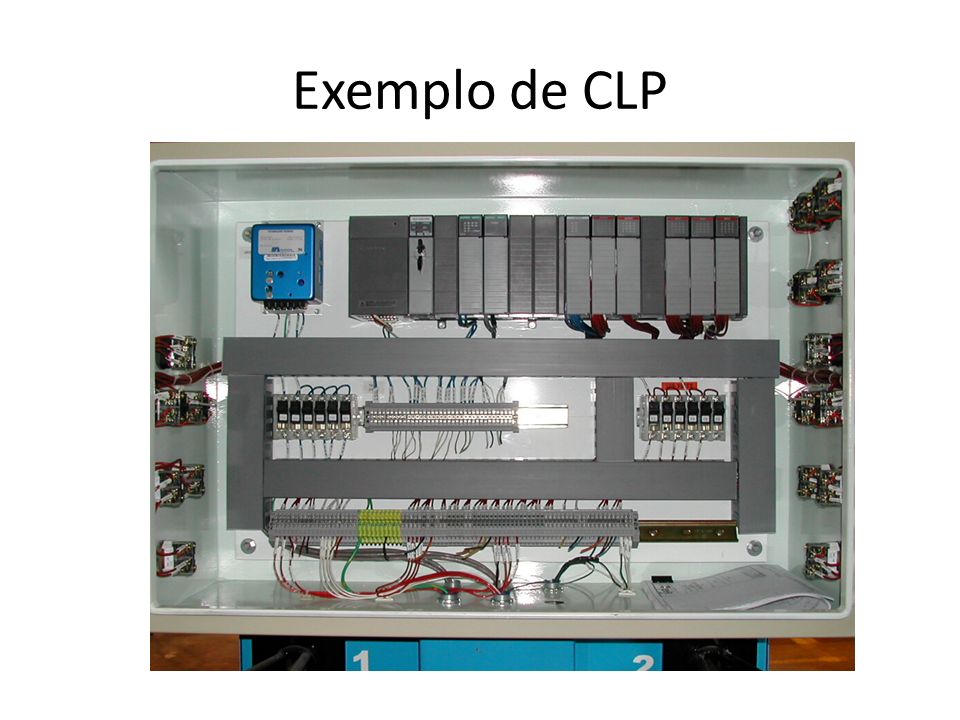
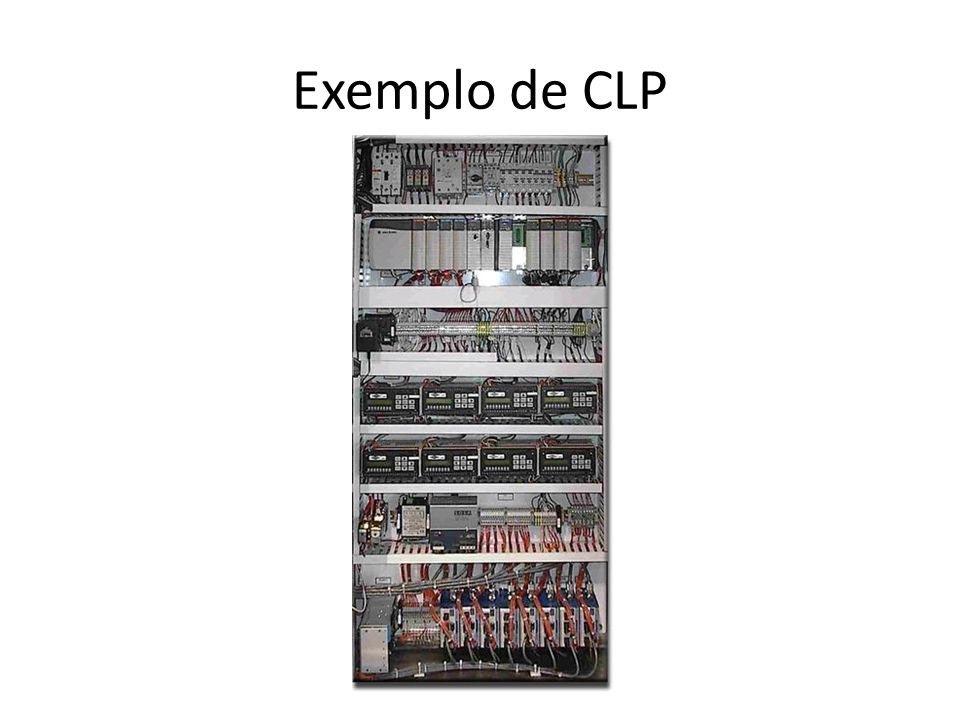
Exemplo de CLP

22
Comunicação entre CLP e computador

23
Exemplo de CLP IHM

24
Exemplo de CLP IHM touch screen

25
Aplicações Controle de Sistemas de Iluminação; Comando de Portas ou Cancelas; Sistemas de Energia; Sistemas de Refrigeração e Ar-Condicionado; Sistemas de Ventilação; Sistemas de Transporte; Controle de Silos e Elevadores; Comando de Bombas e Compressores; Sistemas de Alarme; Comando de Semáforos; Sistemas de Irrigação; Entre outras.

26
Classificação dos CLPs Os CLPs podem ser classificados segundo a sua capacidade: Nano e micro CLPs: possuem até 16 entradas e saídas. Normalmente são compostos por um único módulo com capacidade de memória máxima de 512 passos. CLPs de médio porte: capacidade de entrada e saída em até 256 pontos, digitais e analógicas. Permitem até 2048 passos de memória. CLPs de grande porte: construção modular com CPU principal e auxiliares. Módulos de entrada e saída digitais e analógicas, módulos especializados, módulos para redes locais. Permitem a utilização de até 4096 pontos. A memória pode ser otimizada para o tamanho requerido pelo usuário.

27
Tipos de CLP

28
O hardware de um PLC modular é composto basicamente por 5 elementos: – Fonte de Alimentação – Chassi ou Rack de Montagem – Processador ou CPU – Cartões de I/O – Unidade de Programação

29
Fonte de alimentação Fornecer corrente para todos os módulos do PLC; Níveis de tensão de 24 Vdc ou 110/220 Vac; A escolha da fonte depende da soma de corrente dos diversos módulos.

30
Fonte de alimentação

31
Chassi ou rack Concentra todos os módulos; Permite sustentação e proteção aos outros módulos; Provê conexões para dados e alimentação; Possui número variado de ranhuras (slots); Permite interligação com outros módulos.
; Permite interligação com outros módulos.")
32
Chassi ou rack

33
Cartões de I/O Divide-se em: – Entrada: Digital Analógica – Saída Digital Analógica

34
Cartões de I/O

35
Processador Executa as instruções previamente programadas; Memória: RAM e EEPROM; Bateria e Capacitor; Controla os dispositivos de entrada e saída; Controla os canais de comunicação.

36
Unidade de programação

37
Tipos de variáveis São utilizadas variáveis discretas e analógicas, pois esta mixagem é permitida neste tipo de linguagem. As variáveis analógicas são aquelas que variam continuamente com o tempo. Elas são comumente encontradas em processos químicos advindas de sensores de pressão, temperatura e outras variáveis físicas. As variáveis discretas, ou digitais, são aquelas que variam discretamente com o tempo.

38
Tipos de variáveis

39
Entradas discretas ou digitais São aquelas que fornecem apenas um pulso ao controlador, ou seja, elas têm apenas um estado ligado ou desligado, nível alto ou nível baixo que trabalha com um e zero. Alguns exemplos são: as botoeiras, válvulas eletro-pneumáticas.

40
Entradas discretas ou digitais

41
Entradas analógicas Como o próprio nome já diz, elas medem as grandezas de forma analógica. Para trabalhar com este tipo de entrada os controladores tem conversores analógico-digitais (A/D). Atualmente no mercado os conversores de 10 bits são os mais populares. As principais medidas feitas de forma analógica são a temperatura e pressão. Como exemplo, sensores de pressão ou termopares.
. Atualmente no mercado os conversores de 10 bits são os mais populares. As principais medidas feitas de forma analógica são a temperatura e pressão. Como exemplo, sensores de pressão ou termopares..")
42
Entradas analógicas Termopares flexíveisSensor PT 100

43
Saídas discretas ou digitas São aquelas que exigem do controlador apenas um pulso que determinará o seu acionamento ou desacionamento. Como exemplo têm-se elementos como contatores que acionam os motores de indução e as válvulas eletro-pneumáticas.

44
Saídas discretas ou digitas Contatores Motores Válvulas

45
Saídas analógicas Como dito anteriormente, de forma similar o controlador necessita de um conversor digital para analógico (D/A), para trabalhar com este tipo de saída. Os exemplos mais comuns são: válvula proporcional, acionamento de motores DC, displays gráficos, entre outros.

46
Saídas analógicas Válvula proporcionalConversor Digital para Analógico

47
Principais linguagens de Programação Para a programação do PLC, ou seja criação da inteligência do PLC, é preciso termos como ferramenta uma linguagem que seja inteligível para o programador e lógica para o equipamento. A primeira linguagem criada para programação de PLC´s foi a Ladder. O fato de ser uma linguagem gráfica, baseada em símbolos semelhantes aos encontrados nos esquemas elétricos ( contatos e bobinas ), foi determinante para aceitação do PLC por técnicos e engenheiros acostumados com os sistemas de controle a relés, e é ainda a mais usada.
, foi determinante para aceitação do PLC por técnicos e engenheiros acostumados com os sistemas de controle a relés, e é ainda a mais usada..")
48
Principais linguagens de Programação As linguagens de programação não limitam apenas na linguagem Ladder, a norma IEC 61131-3, define cinco linguagens de programação, que são: Lista de Instruções – LI Texto Estruturado – ST Linguagem Ladder – LD Diagrama de Blocos de Funções - FBD Diagrama Funcional Seqüencial – SFC

49
Elementos básicos de uma programação Ladder A linguagem Ladder foi a primeira que surgiu na programação dos Controladores Lógico Programáveis (CLPs), pois sua funcionalidade procurava imitar os antigos diagramas elétricos, utilizados pelos Técnicos e Engenheiros da época. O objetivo era o de evitar uma quebra de paradigmas muito grande, permitindo assim a melhor aceitação do produto no mercado.

50
Elementos básicos de uma programação Ladder O diagrama de contatos (Ladder) consiste em um desenho formado por duas linhas verticais, que representam os pólos positivo e negativo de uma bateria, ou fonte de alimentação genérica. Entre as duas linhas verticais são desenhados ramais horizontais que possuem chaves. Estas podem ser normalmente abertas, ou fechadas e representam os estados das entradas do CLP. Dessa forma fica muito fácil passar um diagrama elétrico para linguagem Ladder. Basta transformar as colunas em linhas, para o caso de uma simples partida direta.

52
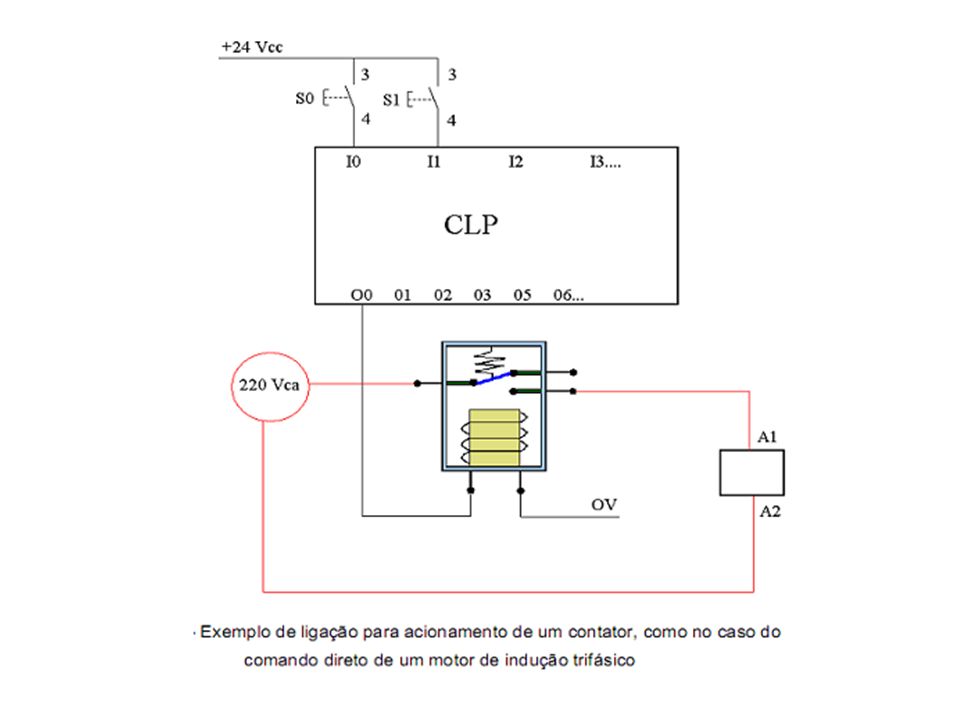
Elementos básicos de uma programação Ladder Não se deve esquecer de ligar as botoeiras e contatores, que são os elementos de comando, externamente ao CLP. Para o caso deste comando as ligações elétricas. É importante observar que o relé foi colocado para permitir a existência de dois circuitos diferentes, o de comando composto por uma tensão contínua de 24 V, e o circuito de potência, composto por uma tensão alternada de 220 V. Ainda no CLP a letra I significa entrada (Input) e a letra O significa saída (Output). Deve-se lembrar sempre que em painéis elétricos o CLP está inserido na parte de comando do mesmo.
 e a letra O significa saída (Output). Deve-se lembrar sempre que em painéis elétricos o CLP está inserido na parte de comando do mesmo..")
54
Elementos essenciais de uma programação Ladder

55
Linguagem Ladder Características: – Linguagem Gráfica; – Conjunto de instruções completo; – Regras gerais: Linhas Verticais: linhas-mãe ou linhas de alimentação As saídas estão sempre na direita O fluxo de execução ocorre de cima para baixo e da esquerda para a direita

56
Exemplo de programa Ladder

57
Funções lógicas em Ladder As funções lógicas são estudadas em todos e quaisquer elementos. A combinação entre os contatos NA e NF servem de importante orientação para o projetista e programador de circuitos lógicos. Função E Função OU Função NÃO E Função NÃO OU Função INVERSORA

58
Função E (AND)
")
59
Função OU (OR)
")
60
Função NÃO E (NAND)
")
61
Função NÃO OU (NOR)
")
62
Função inversora

63
Circuitos de selo Os selos são as combinações mais básicas entre elementos, destinados a manter uma saída ligada, quando se utilizam botoeiras. Com as duas chaves pressionadas o circuito sempre estará desligado. É o mais utilizado por questões de segurança.

Apresentações semelhantes