Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Como Implementar um Problema O objetivo desta aula é fornecer algumas noções técnicas sobre os passos necessários para implementação numérica de um caso no PHOENICS. Serão abordados os itens: As equações de transporte e seus modelos simplificados; As formas de discretização; A escolha da grade; A definição das propriedades; As condições de contorno e termos fontes.

2
FORMA GERAL DAS EQUAÇÕES NO PHOENICS TransienteFonte Convecção Difusão t é o tempo; é a densidade; V é o vetor velocidade; é a propriedade a ser conservada; é o coeficiente de difusão de ; S representa os termos fontes; PHOENICS provê soluções para versões discretizadas de um conujunto de EDP que têm a forma geral:

3
FORMA CONSERVATIVA DE ALGUMAS EQ. DE TRANSPORTE TransienteFonte Convecção Difusão

4
Modelos Matemáticos Simplificados As equações de transporte, na sua forma geral, são bastante complexas devido aos termos não lineares e seus acoplamentos. Uma significativa redução do esforço computacional é obtida se o escoamento puder ser modelado de forma mais simples: Laminar / Turbulento Incompressível / Compressível Euler (s/ viscosidade) / Navier Stokes (viscoso) Potencial (irrotacional) / Euler (rotacional) Stokes (Re -> 0 ) / Re ~ 1 (inercia e viscoso dominantes) Camada Limite (Re -> inf) / Re ~ 1 (inercia e viscoso dominantes) É frequente o surgimento de escoamentos complexos em casos aplicados onde reações químicas (combustão), turbulência, interações entre fases e domínio complexo surgem simultâneamente.
 / Navier Stokes (viscoso) Potencial (irrotacional) / Euler (rotacional) Stokes (Re -> 0 ) / Re ~ 1 (inercia e viscoso dominantes) Camada Limite (Re -> inf) / Re ~ 1 (inercia e viscoso dominantes) É frequente o surgimento de escoamentos complexos em casos aplicados onde reações químicas (combustão), turbulência, interações entre fases e domínio complexo surgem simultâneamente..")
5
MODELOS IMPLEMENTADOS NO VR 17 modelos

6
Modelo Numérico de Discretização: Método dos Volumes Finitos O método dos Volumes Finitos, VF, utiliza a forma integral das equações de contorno como ponto de partida. O domínio de solução é subdividido em um número finito de volumes de controle, VC, adjacentes entre sí onde as equações de conservação são aplicadas. Cada variável é calculada no centroide de cada VC. Os valores das variáveis e propriedades nas faces do VC são determinados por interpolação. O método VF pode acomodar qualquer tipo de grade e é, portanto, aplicável para geometrias complexas. A grade passa a definir as fronteiras do VC e não é necessariamente relacionada a um sistema de coordenadas.

7
Forma Discretizada da Equação I representa uma variável genérica que pode ser: u1, u2, v1, v2, w1, w2, k, e, h1, h2, C1 a C150. P não aparece na lista pois ela é calculada por meio das sucessivas correções da pressão que vem dos ajustes de velocidade para satisfazer o balanço de massa. (método SIMPLE) O domínio de cálculo é dividido em volumes cujas faces são identificadas pelas direções cardiais West-East (x), South-North (y) e Low-High (z) x y z P North East High
 O domínio de cálculo é dividido em volumes cujas faces são identificadas pelas direções cardiais West-East (x), South-North (y) e Low-High (z) x y z P North East High.")
8
Discretização do meio contínuo no espaço e no tempo & nomenclatura das direções.

9
Forma Discretizada da Equação II No plano (x,y), p. exemplo, os centros VCs maiúsculas e faces VCs minúsculas. O método dos Volumes Finitos representa a influência que o ponto P recebe dos vizinhos na forma de produtos de coeficientes e do valor das variáveis: Molécula computacional forma de resíduo zero coeficiente

10
Forma Discretizada da Equação III As equações de conservação são discretizada na forma de um sistema de equações algébricas lineares constituido pela soma das moléculas computacionais que realizam o balanço em cada VC. Os coeficientes que multiplicam cada variável levam as informações sobre transporte convectivo e difusivo da propriedade em questão. Todos os coeficientes, a P e seus vizinhos a nb, são sempre positivos. Existem diversos esquemas discretizantes que conduzem. A escolha deles influência na solução e na taxa de convergência.

11
Esquemas de Discretização Convecção & Difusão: HYBRIDO (default)
")
12
Geometria - Grade I A localização discreta onde as variáveis serão calculadas é definida pela grade numérica. Ela é uma representação do domínio geométrico onde o problema será resolvido. A grade transmite ao modelo informações a respeito da localização do centróide do VC e dos centros das faces, das áreas das faces e do volume e também da distância entre centróides e faces de VC adjacentes. A definição da grade é parte fundamental do problema: - A precisão numérica da solução depende diretamente da definição da grade uma vez que as variáveis são calculadas em pontos discretos definidos pela grade. - A definição da grade é um dos elementos que influência na taxa de convergência (ou divergência) da solução. - O custo computacional é basicamente determinado pelo tamanho da grade.
 da solução. - O custo computacional é basicamente determinado pelo tamanho da grade..")
13
Grades Cartesianas e Polares Uniforme Cartesiana Não-Uniforme Power Não-Uniforme duas regiões Uniforme Polar Não-Uniforme Fine Grid Embedding

14
O sistema polar de coordenadas do PHOENICS O Sistema cilíndrico polar está implementado no PHOENICS e seus termos fontes associados: centrífugo e coriolis para as equações de quantidade de movimento. No sistema polar é necessário definir o Raio Interno, RINNER. As demais especificações de domínio são coincidentes com aquelas do sistema cartesiano. A direção X do cartesiano corresponde a direção tangencial. A direção Y do cartesiano corresponde a direção radial. A direção Z do cartesiano corresponde a direção axial.

15
Necessidade do Controle Espaçamento Grade É necessário controlar o espaçamento da grade para capturar características do escoamento que mudam rápidamente (altos gradientes) e ao mesmo tempo economizar tempo computacional em regiões que variam lentamente. O tamanho da grada é um filtro do tamanho do fenômeno que se quer detectar. Estruturas do escoamento menores que 2x o espaçamento da grade não serão detectadas (alaising). Escoamento de Camada Limite. Aplica-se grades não- uniformes Power ou duas- regiões Esteira de Vórtices em cilindros. Aplica- se fine grid embedding para capturar as dimensões dos vórtices
. Escoamento de Camada Limite. Aplica-se grades não- uniformes Power ou duas- regiões Esteira de Vórtices em cilindros. Aplica- se fine grid embedding para capturar as dimensões dos vórtices.")
16
Grades BFC e Mult-Block para Geometrias Complexas Body Fitted Coordinates - BFC Ortogonal ou Não Ortogonal Multi-Block Ortogonal ou Não Ortogonal Grade Cartesiana com Objetos Imersos: Iteração volume a volume tipo escada ou; Iteração via software com algoritmo PARSOL

17
Tela do VR-PHOENICS com propriedades da Grade

18
Escolha do solver, direção principal do escoamento e eixos XYZ I O PHOENICS possui três tipos de solvers para sistemas de equações lineares que trabalham com métodos iterativos: (1) Varredura (sweeps)- DEFAULT; (2) Whole field e (3) ponto a ponto Group 7. Variables: STOREd,SOLVEd,NAMEd ONEPHS = T NAME( 1) =P1 ;NAME( 5) =V1 NAME( 7) =W1 ;NAME( 14) =TEMP * Y in SOLUTN argument list denotes: * 1-stored 2-solved 3-whole-field * 4-point-by-point 5-explicit 6-harmonic averaging SOLUTN(P1,Y,Y,N,N,N,Y) SOLUTN(V1,Y,Y,N,N,N,Y) SOLUTN(W1,Y,Y,N,N,N,Y) SOLUTN(TEMP,Y,Y,Y,N,N,Y)
 =P1 ;NAME( 5) =V1 NAME( 7) =W1 ;NAME( 14) =TEMP * Y in SOLUTN argument list denotes: * 1-stored 2-solved 3-whole-field * 4-point-by-point 5-explicit 6-harmonic averaging SOLUTN(P1,Y,Y,N,N,N,Y) SOLUTN(V1,Y,Y,N,N,N,Y) SOLUTN(W1,Y,Y,N,N,N,Y) SOLUTN(TEMP,Y,Y,Y,N,N,Y).")
19
Escolha do solver, direção principal do escoamento e eixos XYZ II Dividindo o domínio em fatias (slabs) no plano XY pode-se imaginar um solver iterativo que: 1. - Monta um único sistema de equações IZ = 1 a IZ last e resolve - whole field 2. - Resolve slab a slab de IZ = 1 a IZ = last - solver por varredura - DEFAULT 3. - Visita ponto a ponto do domínio - point by point

20
METODOLOGIAS DE SOLUÇÃO O PHOENICS possui três métodos de solução: Point-by-Point (Jacobi): método totalmente explícito no qual o valor de cada elemento de volume é calculado separadamente. Slabwise: método parcialmente implícito no qual os valores de todos os elementos de volume em um mesmo slab (plano com dimensão em Z constante) são calculados simultaneamente. Whole-field: método totalmente implícito no qual os valores de todos os elementos de volume são calculados simultaneamente.
 são calculados simultaneamente. Whole-field: método totalmente implícito no qual os valores de todos os elementos de volume são calculados simultaneamente..")
21
METODOLOGIAS DE SOLUÇÃO – II Solução do sistema linear de equações: Método TDMA (TriDiagonal Matrix Algorithm) linha por linha. Método do Gradiente Conjugado. Método de Gauss-Seidel com sobre-relaxações sucessivas. Acoplamento pressão-velocidade: SIMPLE (base)
.")
22
Escolha do solver, direção principal do escoamento e eixos XYZ Como a maioria dos modelos são não-lineares, o solver whole field não é recomendado pois tem um custo computacional maior e necessita a cada iteração uma atualização; O point-by-point por sua vez transmite os efeitos dos contornos e dos termos de transporte muito lentamente aos pontos vizinhos e, apesar de ser simples, também não é computacionalmente conveniente. O melhor compromisso encontra-se na solução por slabs DEFAULT. Como a varredura ocorre somente na direção Z é importante que a direção principal do escoamento coincida com o eixo Z no caso de problemas 3D. Casos 2D isto não se aplica pois ele por sí constitui um único slab. Casos com BFC é mandatório que a direção principal do escoamento e o eixo Z coincidam.

23
Condições Iniciais e de Contorno Qualquer modelo matemático expresso por meio de eq. diferenciais não é completo a menos que sejam definidas as C.I. e C.C. As C.I. e C.C. variam dependendo do tipo de equação diferencial que o modelo emprega. As equações diferenciais parciais de segunda ordem são classificadas por três tipos: Elípticas, Parabólicas e Hiperbólicas. A distinção é feita baseando-se na natureza das características, regiões do espaço (superfícies ou linhas) onde a informação sobre a solução é transportada.
 onde a informação sobre a solução é transportada..")
24
Condições Iniciais e de Contorno - EDP - HIPERBÓLICAS Hiperbólicas: duas características reais e distintas. A informação se propaga com velocidade finita em duas direções. Região influenciada pelo valor do ponto C P X Y a b c P depende das informações ao longo do segmento a-b Região influenciada pelo valor do ponto P Característica a esquerda Característica a direita Características (Mach const.) Y X C.C.: necessário conhecer u & v ou ao longo da linha
 Y X C.C.: necessário conhecer u & v ou ao longo da linha.")
25
Condições Iniciais e de Contorno - EDP - PARABÓLICAS Parabólicas: as linhas características se degeneram para uma única curva real. A informação se propaga com velocidade finita em uma direção. Fisicamente significa que a informação de P influencia a solução somente em um lado do plano XY O valor de P influência a solução somente aos pontos à sua direita. P depende dos valores à sua esquerda mas não daqueles à sua direita. A solução numérica utiliza um processo de marcha em X. É necessário especificar somente uma fronteira em X a outra extremidade é aberta X Y P Região influenciada pelo valor do ponto P Y X u = Uinlet u = Uext u = 0

26
Condições Iniciais e de Contorno - EDP - ELÍPTICAS Elípticas: as linhas características são complexas. A informação se propaga em todas direções com velocidade infinita. Fisicamente significa que a informação de P recebe a influência de todos os pontos do domínio! X Y P a bc d T = 0 Dirichlet q= -k T/ x Neuman T/ x = 0 Neuman T/ x = 0 Neuman Em EDP Elípticas somente se você conhecer os valores em todo o contorno você pode determinar a solução

27
Condições de Contorno p/ Escoamentos z y INLET OUTLET NWALL SWALL BLOCK

28
Condição Inicial (tempo) Tal como o espaço o tempo também é representado numa grade cujos volumes variam com incrementos no tempo. Os modelos transientes são de natureza PARABÓLICA no tempo. Isto é, um evento no futuro não pode influenciar o que acontece no presente. Nenhuma condição pode ser imposta na solução (exceto no contorno) em qualquer instante após o início (t=0). Portanto o problema é especificado com uma condição ou campo inicial. Existem duas possibilidades de implementação de esquemas transientes: IMPLÍCITA (default) ou EXPLÍCITA Group 7. Variables: STOREd,SOLVEd,NAMEd NAME( 1) =P1 ;NAME( 3) =U1 NAME( 5) =V1 * Y in SOLUTN argument list denotes: * 1-stored 2-solved 3-whole-field * 4-point-by-point 5-explicit 6-harmonic averaging SOLUTN(P1,Y,Y,N,N,N,N) SOLUTN(U1,Y,Y,N,N,N,Y) SOLUTN(V1,Y,Y,N,N,N,Y)
 em qualquer instante após o início (t=0). Portanto o problema é especificado com uma condição ou campo inicial. Existem duas possibilidades de implementação de esquemas transientes: IMPLÍCITA (default) ou EXPLÍCITA Group 7. Variables: STOREd,SOLVEd,NAMEd NAME( 1) =P1 ;NAME( 3) =U1 NAME( 5) =V1 * Y in SOLUTN argument list denotes: * 1-stored 2-solved 3-whole-field * 4-point-by-point 5-explicit 6-harmonic averaging SOLUTN(P1,Y,Y,N,N,N,N) SOLUTN(U1,Y,Y,N,N,N,Y) SOLUTN(V1,Y,Y,N,N,N,Y).")
29
Implementação Condições de Contorno e Fontes PHOENICS As condições de contorno e os termos fontes das equações são implementados com o mesmo procedimento no PHOENICS. Lista dos tipos de c.c. e termos fonte disponíveis no VR.

30
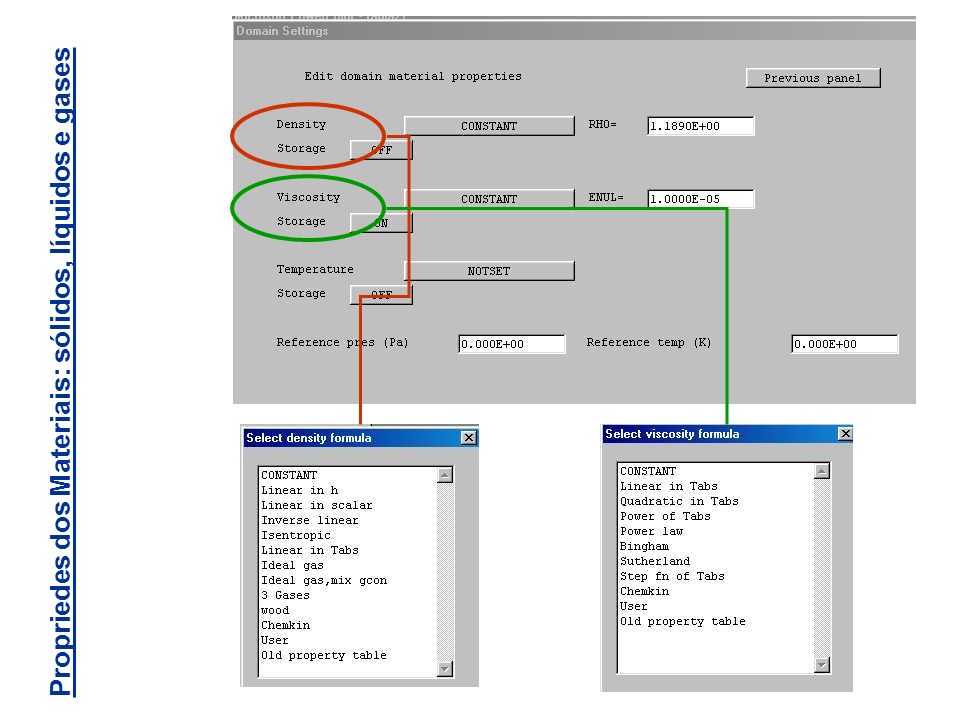
Propriedes dos Materiais: sólidos, líquidos e gases

32
SUMMARY To properly define a case in phoenics one has to specify: GradeLaminar/Turbulento Isotérmico/Calor Compressível/Incomp Propriedades de transporte Condições Iniciais Termos FonteEsquema NuméricoArquivos saída The boundary conditions are specified through objects on the tool bar of VR

33
Conselhos Gerais sobre Implementação de Problemas O PHOENICS, como qualquer outro pacote de CFD passará a falsa impressão que você poderá fazer tudo daqui por diante. Não é verdade, não crie altas expectivas nem falsas impressões. Inicie seus casos da forma mais simples possível. Verifique os aspectos fundamentais e básicos do problema antes de implementá- lo. Procure na biblioteca do PHOENCS algum exemplo parecido com aquilo que você deseja. A biblioteca de casos é um dos grandes diferenciais do PHOENICS, use-a. Introduza as modificações no seu problema uma a uma, numca todas de uma vez. Teste-as isoladamente. Tenha em mente que o método numérico complementa a análise de um problema mas não substitui medidas experimentais. É sempre bom, sempre que possível comparar seus resultados numéricos com algum dado experimental.

Apresentações semelhantes






>")




>")







