Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Parâmetros Geométricos de Câmeras
Realidade Aumentada Cooperativa Marcelo Gattass

2
Parâmetros da câmera Calibração de câmeras:
Extrínsecos ou externos Localização e orientação da câmera Intrínsecos ou internos Definem a relação entre um ponto em coordenadas da câmera e o pixel Calibração de câmeras: estimativas destes parâmetros.

3
Câmera segue um modelo simples
caixa filme objeto pinhole raios de luz imagem Câmera plano de projeção centro de projeção Projeção cônica

4
Objetos distantes aparecem pequenos

5
Linhas paralelas se encontram

6
Notação y' yc p’ zc x' xc

7
(X,Y,Z)T (x’,y’)T(xim,yim)T
yc y' eixo óptico zc y0 x' oc xc x0 f xim yim y' vista lateral yc oy zc fovy h pixels x' oc ox xim f w pixels

8
(xim,yim)T (x’,y’)T yim y’ x’ xim sx p' sy oy o ox Verificando: 3 2 1
xim 1 ox 2 3 4 5 Verificando:

9
(X,Y,Z)T (xim,yim)T
T (xim,yim)T")
10
Parâmetros intrínsecos com cisalhamento

11
Parâmetros intrínsecos com distorção radial
Projeção cônica, distância focal: f Transformação câmera para imagem: Deformação radial:

12
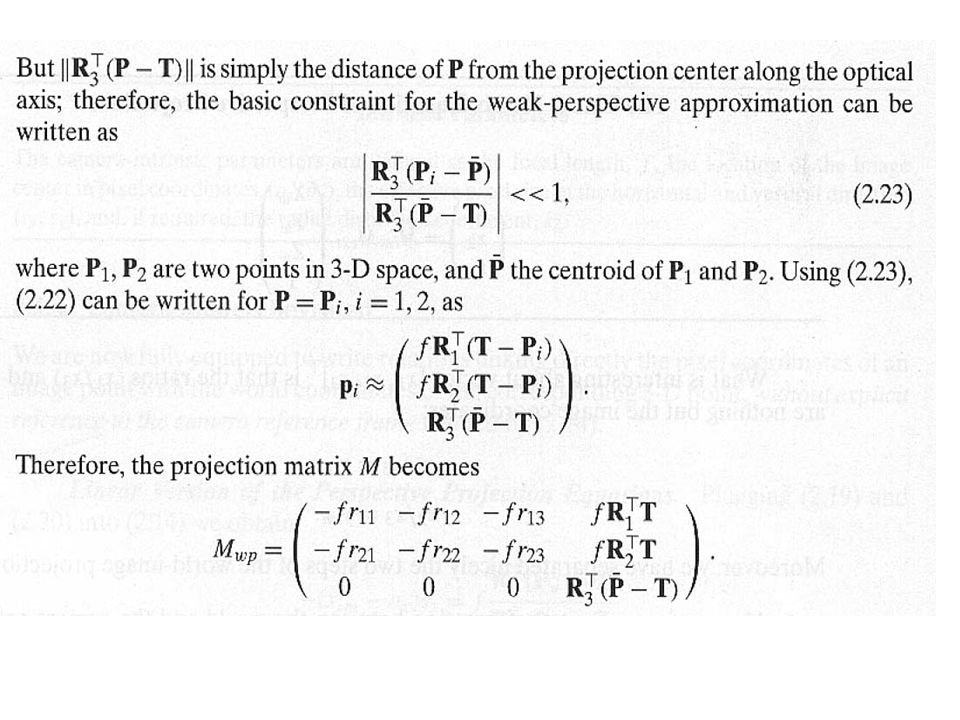
Um caso mais simples valor médio Projeção ortigráfica
seguida de escala

13
Parâmetros extrínsecos
xc yc zc Pc t yw xw zw Pw Outras notações:

14
Parâmetros extrínsecos
Translação –Tx, Ty, Tz (3 g.l.) Rotação (3 g.l.)
 Rotação (3 g.l.)")
15
Formulações para rotação
90° + 90°

16
Velocidade de rotação B B’ B’ B A

17
Re-escrevendo de forma matricial

18
Produto vetorial aplicado 2 vezes

19
Rotações finitas em torno dos eixos cartesianos
y qy x qx qz z

20
Rotações não comutam.

21
Yaw-Pitch-Rol x z y

22
Ângulos de Euler Transforma x-y-z em x’-y’-z’ em 3 passos
Rotação de f em torno eixo z Rotação de q em torno do eixo x Rotação de y em torno do eixo z’

23
Ângulos de Euler Transforma x-y-z em x’-y’-z’ em 3 passos
Rotação de f em torno eixo z Rotação de q em torno do eixo x Rotação de y em torno do eixo z’

24
z y x

25
Composição com sistema local móvel
xL yL TL x y x,xL y,yL x yL y xL R p3= R p e p2 = TL p3 p2 = R T R-1 R p p2 = R T p ou x T R y p1= T p e p2 = R p1 p2 = R T p

26
Ângulos de Euler na ordem x,y,z
qz y y y qy qx x x x

27
Problemas com ângulos de Euler: Gimbal lock

28
Ângulos de Euler Gimbal lock
z z z qz y y y qy=90o qx x x x

29
Interpolação não gera posições “entre”

30
Algebra da rotação em torno de um eixo unitário ê
z y x

31
Rotação em torno de um eixo ê
z y x

32
A coluna da matriz é a transformada dos vetores da base

33
Matriz da rotação em torno de um eixo ê
y x

34
Matriz de rotação em torno de um eixo

35
Demonstração de:

36
Transformações em 3D (rotação em torno de um eixo qualquer)
y’ z’ 1 m12 m22 m32 m13 m23 m33 y z x = m11 m21 m31 z m11 = ex2 + cosq (1- ex2) m12 = exey(1-cosq ) - ez sen q m13 = ezex(1-cosq ) + ey sen q m21 = exey(1-cosq ) + ez sen q m22 = ey2 + cosq (1- ey2) m23 = eyez(1-cosq ) - ex sen q m31 = exez (1-cosq ) - ey sen q m32 = eyez(1-cosq )+ ex sen q m22 = ez2 + cosq (1- ez2) y x
 m12 = exey(1-cosq ) - ez sen q. m13 = ezex(1-cosq ) + ey sen q. m21 = exey(1-cosq ) + ez sen q. m22 = ey2 + cosq (1- ey2) m23 = eyez(1-cosq ) - ex sen q. m31 = exez (1-cosq ) - ey sen q. m32 = eyez(1-cosq )+ ex sen q. m22 = ez2 + cosq (1- ez2) y. x.")
37
Fórmula de Rodrigues 1

38
Fórmula de Rodrigues 2

39
Quatérnios e rotações Dada uma rotação definida por um eixo ê e um ângulo construímos o quatérnio unitário: Dado um ponto qualquer p do R3 construímos o quatérnio: Calculamos o produto:

40
Demonstração …

41
Modelo de câmera do livro

42
Linearização do problema
Neglecting radial distortion

43
Casos particulares

45
Problema yim oy ox xim y' yc zc x' 1000 vista lateral fovy 480
oc zc 1000 fovy oy xim yim 480 ox w pixels x' y'

Apresentações semelhantes










>")








