Carregar apresentação
1
Transformações Geométricas Coordenadas Homogêneas e Rotações

2
Motivação: representação de movimentos e formas

3
Objetos compostos hierarquicamente Hieraquia de movimentos Base Braço 1 Braço 2 Braço 3 Dedo Hieraquia de transformações

4
Transformações R 2 R 2 Exemplos: x y x´ y´ p´p´ = x y x y p =

5
Transformações lineares R 2 R 2 x y m 11 x´ y´ = m 21 m 22 m 12 Mostre que: 1 0 x y 0 1 m 11 m 21 1 0 T = m 12 m 22 0 1 T = T (0) = 0 A) B)
 = 0 A) B)")
6
Transformações lineares: escala x y a = x y x´ y´ a´a´ = Redução (0< s x <1), Aumento (s y >1) c b x y i j
, Aumento (s y >1) c b x y i j")
7
Transformações lineares: espelhamento x´ = -1x y´ = y x y x´ y´ p' = = p x y x y i j

8
Transformações lineares: rotação x´ y´ p' = x´ y´ r x´ = x.cos - y.sen y´ = x.sen + y.cos x y p = x y r rr

9
Transformações Lineares: matriz derivada pela geometria x y i j

10
Mudança de referêncial x y p = x y x y cos u v = sen cos -sen u v u v ou x y p = x´ y´ p' = x y x y uxux u v = vxvx vyvy uyuy Para montarmos a matriz que transforma as coordenadas de um refencial xy para um novo refencial uv basta escrevermos as linhas como sendo os unitários das direções. x y i j

11
Mudança de coordenadas entre sistemas rotacionados As coordenas de um ponto rodado de um ângulo em relação a um sistema são iguais as coordenadas do ponto original em relação a um sistema que sofre a rotação inversa. Como o novo sistema sofre a rotação inversa, a matriz de rotação é a inversa da matriz que levaria da base original para a este novo sistema. As colunas de uma matriz de uma rotação são as transformadas dos vetores da base e a transposta desta matriz é a sua inversa (rotação matriz ortonormal). Logo as linhas da matriz que escreve uma mudança entre bases ortonormais rodadas são as coordenadas do vetores da nova base em relação a base original.
. Logo as linhas da matriz que escreve uma mudança entre bases ortonormais rodadas são as coordenadas do vetores da nova base em relação a base original..")
12
Transformações lineares: cisalhamento (shear) Cisalhamento em x x x yy x y i j
 Cisalhamento em x x x yy x y i j")
13
Exemplo de aplicação do cisalhamento x y a b c plano de projeção m x y a' m' x y c' b' a' m'

14
Exemplo de aplicação do cisalhamento x y a x y c' b' a' m'

15
Decomposição Singular de Matrizes diagonal rotações

16
Exemplo: cisalhamento como composição de rotações e escala

17
Transformações Geométricas: Translação x y p p' txtx tyty t = x y = txtx tyty + = x y x y ? x´ y´ = ? ? ? x y 1 x´ y´ = 0 1 0 txtx tyty + Não pode ser escrito na forma Ruim para implementação

18
Translação num plano do R 3 yhyh xhxh w w=1 x y t matriz de translação

19
Concatenação x y x0x0 y0y0 x y x y x y x0x0 y0y0

20
Concatenação xyx y x y xyx y x y T1T1 R1R1 E R2R2 T2T2 P= T 2 R 2 E R 1 T 1 P

21
Vantagens das coordenadas homogêneas (pontos no infinito) yhyh xhxh w w=1 x y 2 3 u = u uhuh 2 3 0 = ? ? uhuh w h1h1 c1c1 h 2 = c 2 h3h3 c3c3 2 3 2 2 3 1 2 3 1/2 2 3 1/4 2 3 0... 1 1.5 2 3 4 6 8 12 infinito na direção (2,3) infinito na direção (2,3) h1h1 h2h2 h3h3 h4h4 c1c1 c2c2 c3c3 c4c4
 infinito na direção (2,3) h1h1 h2h2 h3h3 h4h4 c1c1 c2c2 c3c3 c4c4.")
22
Reta no espaço projetivo yhyh xhxh w reta: ax+by+c=0 plano: ax+by+cw=0 plano: w=1

23
Reta paralelas no espaço projetivo yhyh xhxh w plano: ax+by+c 1 w=0 reta: ax+by+c 1 =0 reta: ax+by+c 2 =0 plano: ax+by+c 2 w=0 reta= ax+by =0 plano: w=1

24
Matriz da Homografia

25
[A] : Afim Obs: Se fosse um paralelograma a imagem do ponto 2 seria (1,1) T e não (α, ) T
![[A] : Afim Obs: Se fosse um paralelograma a imagem do ponto 2 seria (1,1) T e não (α, ) T](http://images.slideplayer.com.br/2/358263/slides/slide_25.jpg "[A] : Afim Obs: Se fosse um paralelograma a imagem do ponto 2 seria (1,1) T e não (α, ) T")
26
[P] : Projetiva
![[P] : Projetiva](http://images.slideplayer.com.br/2/358263/slides/slide_26.jpg "[P] : Projetiva")
27
[N] : Paralelograma para quadrado unitário
![[N] : Paralelograma para quadrado unitário](http://images.slideplayer.com.br/2/358263/slides/slide_27.jpg "[N] : Paralelograma para quadrado unitário")
28
Transformações em 3D (translações e escalas) x y z 1 0 1 0 0 0 0 1 0 txtx tyty tztz 1 y z 1 x = 1 0 0 0 x y z x y z 1 0 sysy 0 0 0 0 szsz 0 0 0 0 1 y z 1 x = sxsx 0 0 0
 x y z txtx tyty tztz 1 y z 1 x = x y z x y z 1 0 sysy szsz y z 1 x = sxsx 0 0 0")
29
Rotação em torno do eixo y x y z y z x y

30
Rotação em torno do eixo x x y z x

31
Rotação em torno do eixo z x y z z

32
Rotações em torno dos eixos cartesianos x y z x y z

33
Instanciação de objetos braço ante-braço x y z 1 1 1

34
Ordem das transformações x y R x y T x y R x y x y T (a) (b)
 (b)")
35
Composição com sistema local móvel x,x L y,y L xLxL yLyL TLTL x y p 2 = R T pp 1 = T p e p 2 = R p 1 x T R y xx yy p= R p e p 2 = T L p p 2 = R T p ou p2p2 x yLyL x y xLxL R p p p 2 = R T R -1 R p

36
Instâncias de objetos x2x2 y z2z2 xz y2y2 x4x4 y4y4 z4z4 x6x6 x1x1 y1y1 z1z1 x3x3 y3y3 z3z3 x5x5 z5z5 y5y5 d1d1 d2d2

37
x2x2 y z2z2 xz y2y2 x4x4 y4y4 z4z4 x1x1 y1y1 z1z1 x3x3 y3y3 z3z3 x5x5 z5z5 y5y5 d1d1 d2d2 baseI ante-braçoR y R z1 T y1 cotoveloR y R z1 T y1 T y2 braçoR y R z1 T y1 T y2 R z3 T y3 pulsoR y R z1 T y1 T y2 R z3 T y3 T y3 mãoR y R z1 T y1 T y2 R z3 T y3 T y3 R z5 OpenGL:

38
x2x2 y z2z2 xz y2y2 x4x4 y4y4 z4z4 x1x1 y1y1 z1z1 x3x3 y3y3 z3z3 x5x5 z5z5 y5y5 d1d1 d2d2 Desenha a base; Roda em y; Roda em z 1 ; Translada em y 1 de d 1 /2; Desenha o ante-braço; Translada em y 2 de d 1 /2; Desenha cotovelo; Roda em z 3 ; Translada em y 3 de d 2 /2; Desenha o braço; Translada em y 3 de d 2 /2; Desenha o pulso; Roda em z 5 ; Desenha a mão;

39
Hierarquia em árvore base braço direitobraço esquerdo

40
Hierarquia em árvore x5x5 y5y5 y6y6 y7y7 y8y8 y9y9 x6x6 x7x7 x8x8 x9x9 a b c d eef a palma base dos dedos dedo direitodedo esquerdo

41
y7y7 y8y8 y9y9 x7x7 x8x8 x9x9 a b c e ef void desenhaDedos(float b,float c, float e, float f ){ /* dedo esquerdo */ glPushMatrix(); /* Salva matriz corrente C 0 */ glTranslatef((f+e)/2,(b+c)/2,0.); /* C=CT esq */ glScalef(e,c,e); /* C=CS */ glutSolidCube(1.0); glPopMatrix(); /* Recupera da pilha C=C 0 */ /* dedo direito */ glPushMatrix(); /* Salva matriz corrente C 0 */ glTranslatef(-(f+e)/2,(b+c)/2,0.); /* C=CT dir */ glScalef(e,c,e); /* C=CS */ glutSolidCube(1.0); glPopMatrix(); /* Recupera da pilha C=C 0 */ }
{ /* dedo esquerdo */ glPushMatrix(); /* Salva matriz corrente C 0 */ glTranslatef((f+e)/2,(b+c)/2,0.); /* C=CT esq */ glScalef(e,c,e); /* C=CS */ glutSolidCube(1.0); glPopMatrix(); /* Recupera da pilha C=C 0 */ /* dedo direito */ glPushMatrix(); /* Salva matriz corrente C 0 */ glTranslatef(-(f+e)/2,(b+c)/2,0.); /* C=CT dir */ glScalef(e,c,e); /* C=CS */ glutSolidCube(1.0); glPopMatrix(); /* Recupera da pilha C=C 0 */ }")
42
Algebra da rotação em torno de um eixo unitário ê x y z

43
Rotação em torno de um eixo ê x y z

44
A coluna da matriz é a transformada dos vetores da base

45
Matriz da rotação em torno de um eixo ê x y z

46
Matriz de rotação em torno de um eixo

47
Demonstração de:

48
Fórmula de Rodrigues 1

49
Fórmula de Rodrigues 2

50
Matriz de rotação em torno de um eixo ê que não passa pela origem x y z x y z p0p0 p0p0 x y z p0p0 M x y z p0p0

51
Interface para rotações tipo ArcBall

52
Rotação do ArcBall

53
Conservativo

54
Complexidade da Rotação 90° + 90° Giroscópio

56
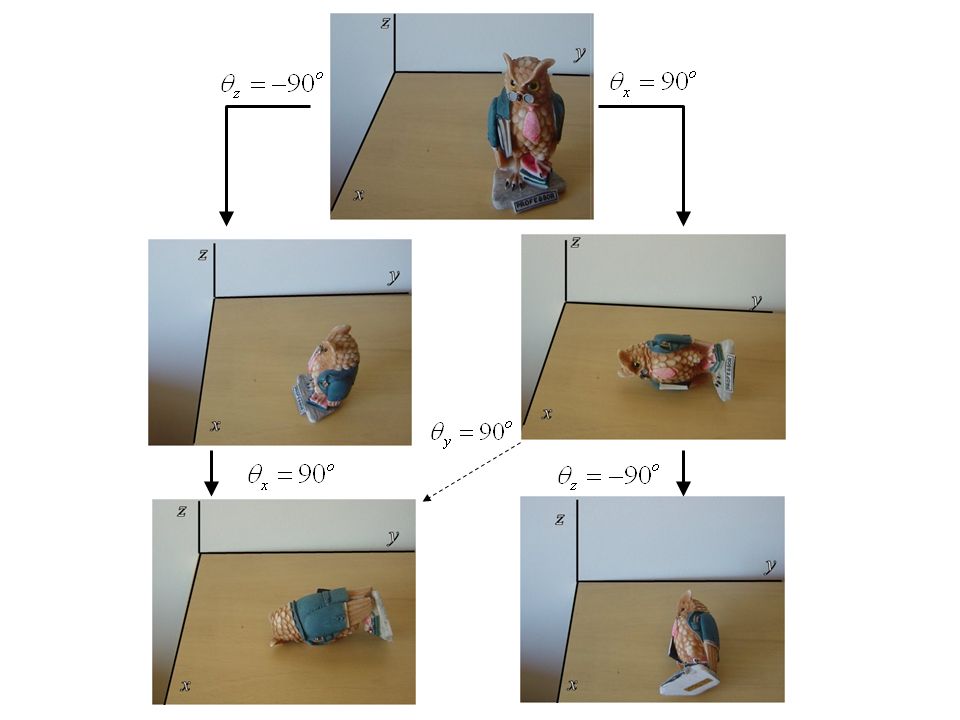
Yaw-Pitch-Roll x z y - yaw - pitch - roll

57
Ângulos de Euler Transforma x-y-z em x-y-z em 3 passos Rotação yaw de em torno eixo z Rotação pitch de em torno do eixo Rotação de em torno do eixo

58
x z y

59
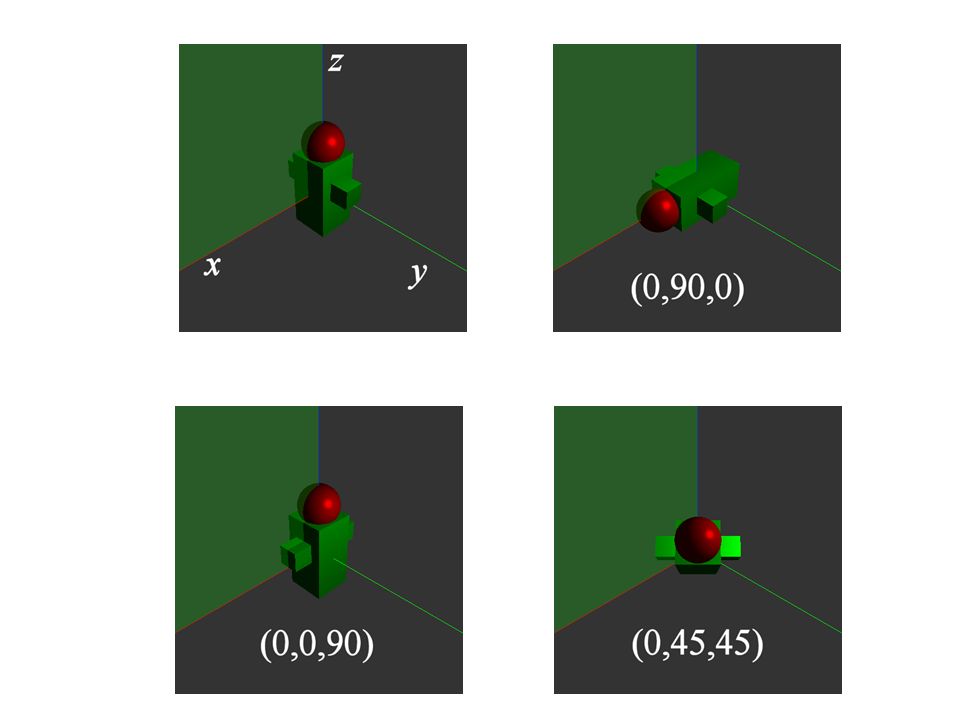
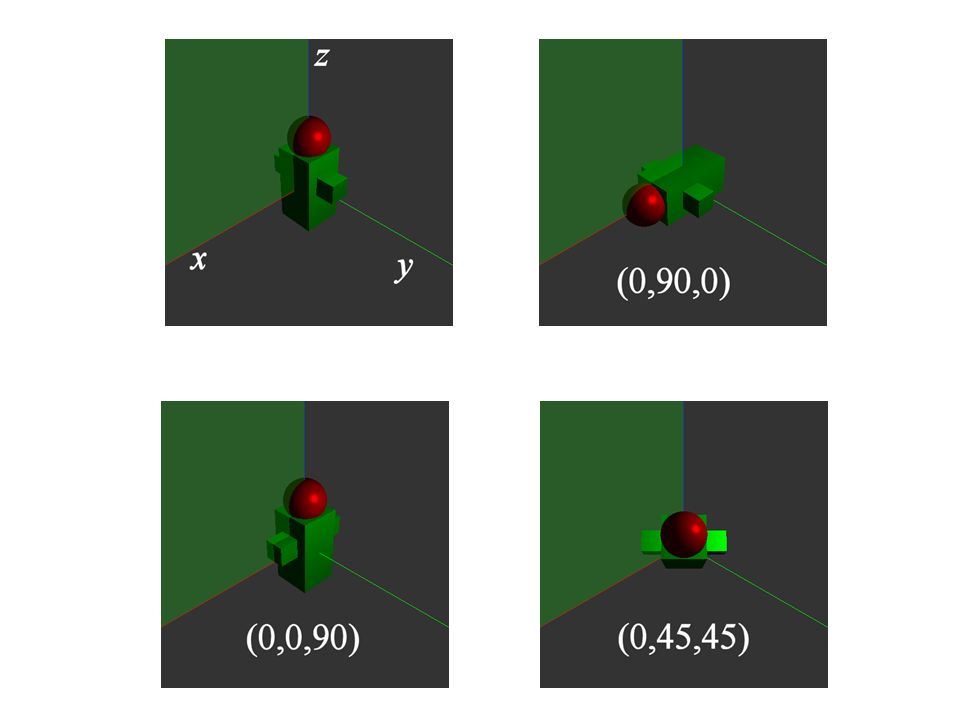
Parametrização de rotações: Ângulos de Euler x x y z y x y z z x y z

60
Ângulos de Euler Gimbal Lock

61
x x y z y =90 o x y z z x y z

62
Interpolação não gera posições entre

63
Quatérnios

64
Soma e multiplicação por escalar

65
Produto de dois quatérnios

66
Produto de dois quatérnios(cont.)
")
67
Conjugado, normas e produto interno conjugado de um quatérnio norma de um quatérnio produto interno de dois quatérnios norma euclidiana

68
Quatérnio inverso e unitário inverso de um quatérnio unitário de um quatérnio

69
Quatérnios e rotações Dada uma rotação definida por um eixo ê e um ângulo construímos o quatérnio unitário: Dado um ponto qualquer p do R 3 construímos o quatérnio: Calculamos o produto:

70
Demostração …

71
Composição de rotações seguida de

72
Composição de rotações

73
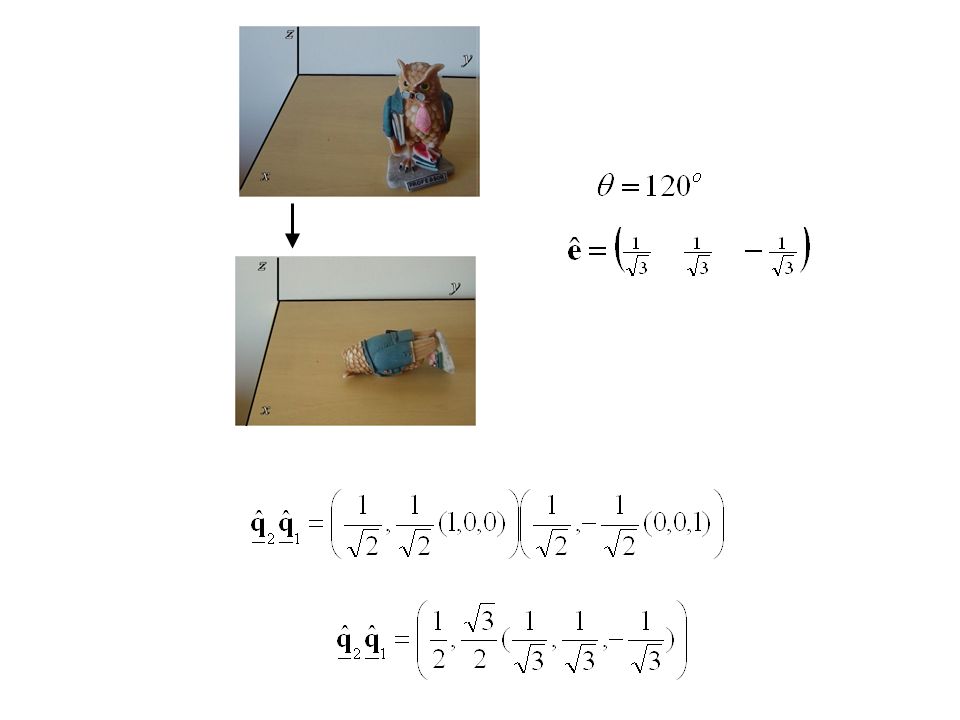
Exemplo

75
Interpolação de quatérnios não é unitário não representa rotação

76
Interpolação de quatérnios (1-t) t
 t")
79
Quatérnios e matrizes

80
Matrizes e quatérnios

81
Transformação de normais x y s x =0.5 x y x y

82
Vantagens das coordenadas homogêneas (pontos no infinito, exemplo) a b c d x y O 1 1 2 a' b' c' d' x y O' infinito 1 12 1 1 1 3 0 1 0 1 0 -2 0 0 3 0 1 0 1 0 0 0 = 1 1 1 2 2 1 3 0 1 0 1 0 0 0 = 4 2 2 1 1 3 0 1 0 1 0 -2 0 0 = 1 1 2 -2 1 3 0 1 0 1 0 0 0 = 4 2 2 1 1 = = 2 1
 a b c d x y O a b c d x y O infinito = = = = = = 2 1")
83
FIM
















>")




