Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Computação Gráfica: Rendering e Rasterização http://www.fei.edu.br/~psergio psergio@fei.edu.br

2
Conteúdo: Rendering Fases do Processo de Realismo Visual Realismo por Passadas Acabamentos não-fotográficos Rasterização Algoritmo de Bresenham para traçado de linhas Rasterização de Polígonos Preenchimento de polígonos por scanline Remoção de Linhas e Superfícies Escondidas Biografia: Computação Gráfica: Teoria e Prática; Eduardo Azeredo e Aura Conci; Editora Campus; (Volume Antigo!!!)
")
3
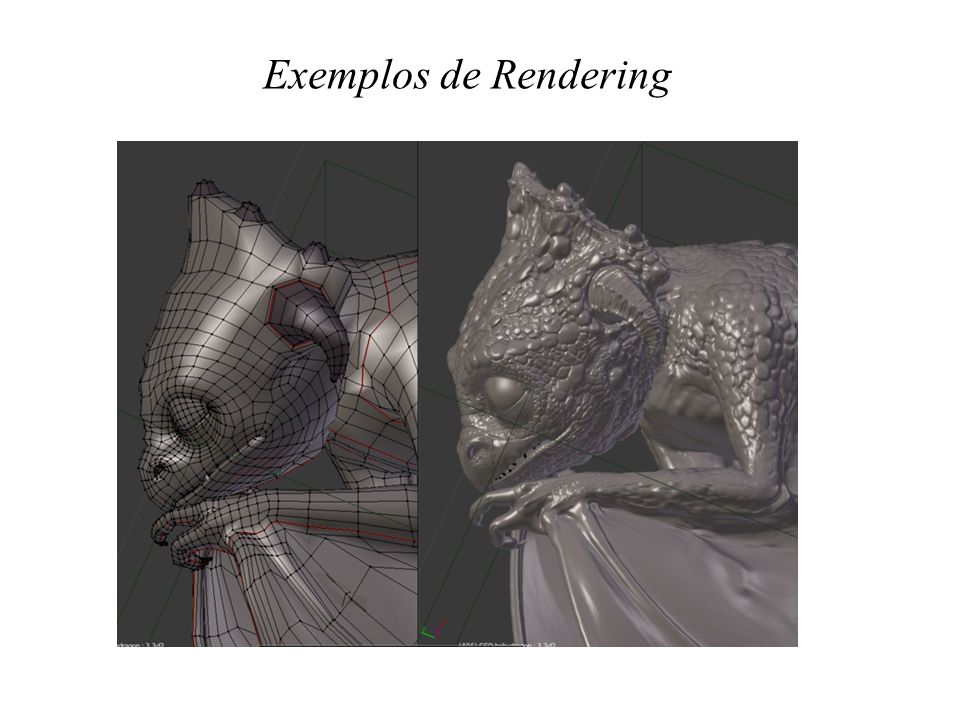
O que é o Rendering Processo de criação sintética, é denominado rendering a fase de Introdução nas cenas, do realismo fotográfico. Basicamente, podemos descrevê-la por realismo visual. Podemos interpretar o processo de rendering como o de converter dados em uma imagem realística ou simplesmente sintetizar um objeto ou cena até ter-se deles uma aparência de algo real e não de formas inteiramente criadas no computador.

4
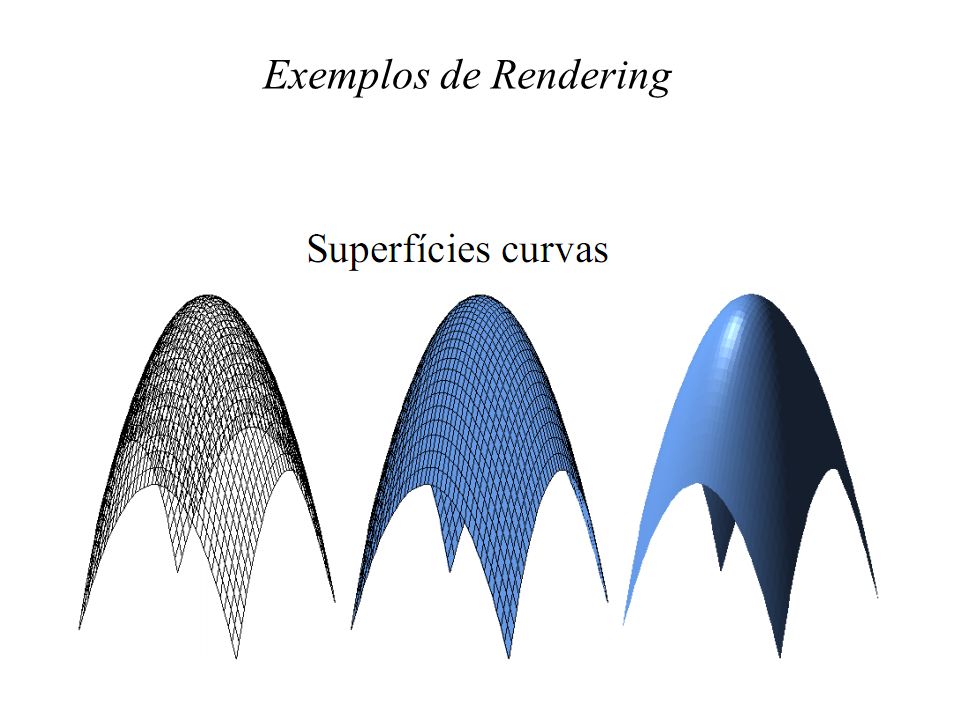
Exemplos de Rendering

7
Rendering

9
Fases do Processo de Realismo Visual Construção do modelo Transformações lineares Eliminação de polígonos ou faces escondidas Clipping Rasterização Culling Coloração, Textura e Iluminação

10
Realismo por passadas Vantagens do realismo por passadas: a)economia de memória b)facilidade de introdução de modificações c)maior utilização das imagens estáticas d)pode eliminar o anti-alizing e)integração f)reciclagem g)deph of field (simulação de foco) h)glows (incandescência)
economia de memória b)facilidade de introdução de modificações c)maior utilização das imagens estáticas d)pode eliminar o anti-alizing e)integração f)reciclagem g)deph of field (simulação de foco) h)glows (incandescência)")
11
Realismo por passadas Tipos de passadas: a)Cores b)Iluminação c)Reflexões d)Sombras e)Efeitos Especiais f)Profundidade
Cores b)Iluminação c)Reflexões d)Sombras e)Efeitos Especiais f)Profundidade")
12
Rasterização Processo de conversão da representação vetorial para a matricial.

13
Rasterização de Retas Algoritmo de Bresenham para Traçado de Linhas x = x1 y = y1 Dx = x2 – x1 Dy = y2 – y1 m = Dy/Dx e = m – 1/2 for i = 1 to Dx do desenhaPonto(x,y) while e >= 0 do y = y + 1 e = e – 1 end while x = x + 1 e = e + m end for
 while e >= 0 do y = y + 1 e = e – 1 end while x = x + 1 e = e + m end for")
14
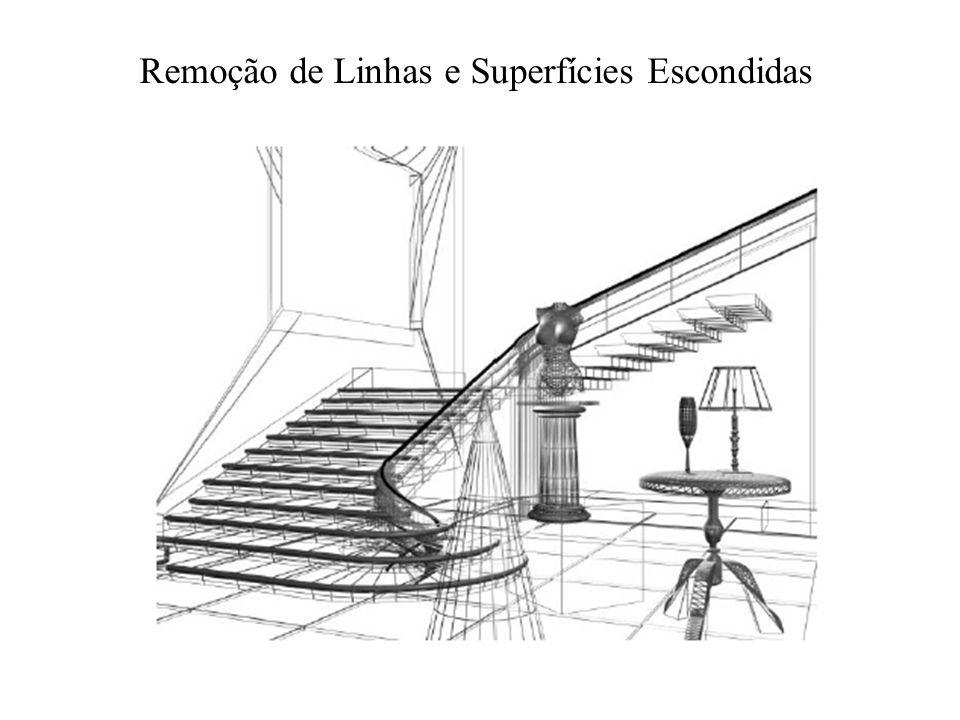
Remoção de Linhas e Superfícies Escondidas

16
Os diferentes algoritmos deverão realizar as seguintes tarefas: Ler as coordenadas tridimensionais do objeto e armazená-las em forma de matriz. Localizar no espaço 3D a posição do observador, através da qual definirá os parâmetros de visibilidade. Calcular o vetor normal 3D de cada face do objeto. Calcular o vetor da linha de visibilidade para cada face do objeto. Esse vetor é definido pela ligação de algum ponto da face ao observador.

17
Remoção de Linhas e Superfícies Escondidas Realizar o teste de visibilidade. Isso é feito verificando a magnitude do ângulo formado pela normal à face em consideração e a linha de visibilidade. Esse é o ângulo identificado com a letra grega beta ß. Se o valor absoluto do ângulo ß estiver entre 90° e 180°, a superfície estará invisível. A superfície estará visível se esse ângulo estiver entre –90° e 90°. O teste de visibilidade é feito através do ângulo em um dos lados de um cubo. O teste de visibilidade é o ponto central do algoritmo de culling.

18
Remoção de Linhas e Superfícies Escondidas Definir os vértices (ou cantos) das faces do objeto e armazená-los de forma matricial (raster). Verificar os vértices (ou cantos) visíveis, com seus respectivos posicionamentos. Traçar as arestas das faces visíveis, que revelarão o objeto como enxergado de um determinado ponto de vista. Se desejado, é possível traçar também as linhas não-visíveis (tracejadas ou não) naquele ponto de vista.
 visíveis, com seus respectivos posicionamentos. Traçar as arestas das faces visíveis, que revelarão o objeto como enxergado de um determinado ponto de vista. Se desejado, é possível traçar também as linhas não-visíveis (tracejadas ou não) naquele ponto de vista..")
19
Hidden Surface Removal (HSR): Algoritmos de remoção de superfícies escondidas Algoritmo de Visibilidade por Prioridade ou Algoritmo do Pintor; Algoritmo de Eliminação de Faces Ocultas pelo Cálculo da Normal; Algoritmo Z-Buffer.
: Algoritmos de remoção de superfícies escondidas Algoritmo de Visibilidade por Prioridade ou Algoritmo do Pintor; Algoritmo de Eliminação de Faces Ocultas pelo Cálculo da Normal; Algoritmo Z-Buffer.")
20
Algoritmo de Visibilidade por Prioridade ou Algoritmo do Pintor Usando uma linha simplificada de raciocínio como: se um objeto A bloqueia a visão de um objeto B e ambos os objetos encontram-se na mesma linha de visão do observador, então o objeto B está mais distante do observador que o objeto A, é possível criar um algoritmo que calcule a distância dos objetos ao observador, e que dê prioridade à visualização dos objetos mais próximos ao observador. Calcula-se a distância ao observador de todas as faces poligonais da cena (que chamaremos de D); Ordenam-se todos os polígonos pelo valor da sua distância ao observador,D; Resolvem-se as ambigüidades nos casos em que as distâncias ao observador (D) de dois polígonos forem iguais (verificando se ocupam as mesmas posições rasterizadas ou não); Desenham-se primeiro os polígonos que tiverem mais distantes do observador (ou seja, os que tiverem maior valor de D).
; Ordenam-se todos os polígonos pelo valor da sua distância ao observador,D; Resolvem-se as ambigüidades nos casos em que as distâncias ao observador (D) de dois polígonos forem iguais (verificando se ocupam as mesmas posições rasterizadas ou não); Desenham-se primeiro os polígonos que tiverem mais distantes do observador (ou seja, os que tiverem maior valor de D)..")
21
Algoritmo de Visibilidade por Prioridade ou Algoritmo do Pintor

22
Eliminação de Faces Ocultas pelo Cálculo da Normal Ler as coordenadas do objeto no espaço tridimensional, considerando um ponto de referência e armazená-las em forma de matriz; Localizar no espaço a posição do observador, através da qual serão definidos os parâmetros de visibilidade; Calcular o vetor normal de cada face do objeto; Calcular o vetor da linha de visibilidade para cada face do objeto; Realizar o teste de visibilidade calculando o produto escalar entre os dois vetores: Se n. l > 0, a face estará visível Se n. l < 0, a face estará invisível Definir os cantos das faces do objeto e armazená-los em forma matricial; Verificar os cantos visíveis, com seus respectivos posicionamentos; Traçar as arestas das faces visíveis, que revelarão o objeto como observado de um determinado ponto de vista. Se desejável, é possível traçar também as linhas não-visíveis naquele ponto de vista.

23
Algoritmo Z-Buffer O algoritmo z-buffer, desenvolvido inicialmente por Catmull [Catmull, 74], é um dos algoritmos de determinação de visibilidade de superfícies mais simples de se implementar, tanto em software quanto em hardware, e hoje é o mais popular dentre os algoritmos de HSR. Porém, apresenta alto custo de memória e processamento. Requer a alocação de até dois buffers, ou matrizes, em memória, com dimensões idênticas à tela de apresentação, normalmente denominados buffers de Imagem e de Profundidade. Criar e inicializar com a cor de fundo um array bidimensional, que conterá a informação de cada pixel da tela; Inicializar o array com o valor da máxima profundidade; Achar a coordenada z para cada ponto do polígono; Testar a profundidade z de cada ponto da superfície para determinar a mais próxima do observador; Atualizar o valor nos arrays se z estiver mais próximo do observador.
![Algoritmo Z-Buffer O algoritmo z-buffer, desenvolvido inicialmente por Catmull [Catmull, 74], é um dos algoritmos de determinação de visibilidade de superfícies mais simples de se implementar, tanto em software quanto em hardware, e hoje é o mais popular dentre os algoritmos de HSR.](http://images.slideplayer.com.br/2/366981/slides/slide_23.jpg "Porém, apresenta alto custo de memória e processamento. Requer a alocação de até dois buffers, ou matrizes, em memória, com dimensões idênticas à tela de apresentação, normalmente denominados buffers de Imagem e de Profundidade. Criar e inicializar com a cor de fundo um array bidimensional, que conterá a informação de cada pixel da tela; Inicializar o array com o valor da máxima profundidade; Achar a coordenada z para cada ponto do polígono; Testar a profundidade z de cada ponto da superfície para determinar a mais próxima do observador; Atualizar o valor nos arrays se z estiver mais próximo do observador..")
24
Algoritmo Z-Buffer Para cada polígono P da cena Para cada pixel (x, y) de um polígono P computar z_depth na posição x, y se z_depth < z_buffer (x, y) então defina_pixel (x, y, color) troque o valor : z_buffer (x, y) = z_depth
 de um polígono P computar z_depth na posição x, y se z_depth < z_buffer (x, y) então defina_pixel (x, y, color) troque o valor : z_buffer (x, y) = z_depth")
Apresentações semelhantes






>")




>")








