Carregar apresentação
A apresentação está carregando. Por favor, espere

1
DESENVOLVIMENTO DE SOFTWARE PARA ACIONAMENTO DE UMA PLATAFORMA MÓVEL AUTÔNOMA COM MICROCONTROLADOR
Aluna: Gabriela Werner Gabriel Orientadores: Cairo L. Nascimento Jr. Eduardo H. Yagyu

2
MOTIVAÇÃO PLATAFORMA COMANDADA VIA PC ATRAVÉS DE COMUNICAÇÃO SERIAL
PROBLEMA: LIMITAÇÃO NA AMPLITUDE DO MOVIMENTO

3
AGENDA OBJETIVO PROJETO HARDWARE PROGRAMAS TESTES CONCLUSÃO

4
OBJETIVO IMPLEMENTAÇÃO DE UM MICROCONTROLADOR CAPAZ DE TRAZER PARTE DA INTELIGÊNCIA PARA A PLATAFORMA; IMPLEMENTAR SENSORES DE CONTATO CAPAZES DE DETECTAREM A COLISÃO.

5
IMPLEMENTAÇÃO E INTEGRAÇÃO
FASES DO PROJETO PROJETO E ANÁLISES IMPLEMENTAÇÃO E INTEGRAÇÃO TESTES E MEDIDAS

6
PROJETO E ANÁLISE ESCOLHA DO MICROCONTROLADOR ESCOLHA DOS MOTORES
ESCOLHA DOS CIRCUITOS ESCOLHA DAS LINGUAGENS DE PROGRAMAÇÃO UTILIZADAS

7
IMPLEMENTAÇÃO E INTEGRAÇÃO
IMPLEMENTAÇÃO DO CIRCUITO DE ACIONAMENTO ALTERAÇÃO DO PROGRAMA DE ESCOLHA DA TRAJETÓRIA CRIAÇÃO DO PROGRAMA DO MICROCONTROLADOR CRIAÇÃO DO PROGRAMA DE COMUNICAÇÃO IMPLEMENTAÇÃO DOS SENSORES INTEGRAÇÃO DOS DIVERSOS SISTEMAS

8
TESTES E MEDIDAS MEDIDAS DAS DIMENSÕES DA PLATAFORMA
AQUISIÇÃO DE DADOS TESTES DE MOVIMENTO

9
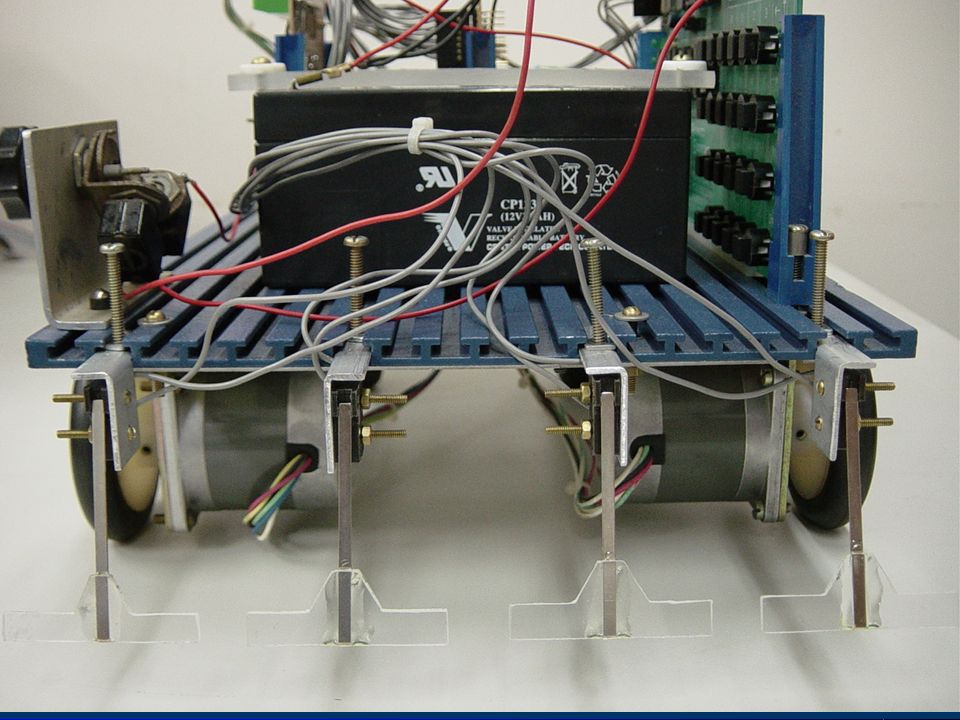
HARDWARE DA PLATAFORMA
KIT AES-51 MOTORES CIRCUITO DE ACIONAMENTO DOS MOTORES RODAS BATERIA PLATAFORMA SENSORES DE CONTATO CIRCUITO DOS SENSORES CHAVE LIGA-DESLIGA

10
Placa do kit AES-51 Circuito dos Sensores Bateria Circuito de Potencia e Circuito de Acionamento dos Motores Sensores Rodas Livres Motores de Passo Chave Seletora Rodas Tracionadas

11
KIT AES-51 MICROCONTROLADOR INTEL 80C32
INTERFACES DE IO (PORTA SERIAL COM CONECTOR DB9) PROGRAMAS DE INTERFACE (TE, ASM51, EEDIT) TECLADO E LCD
 PROGRAMAS DE INTERFACE (TE, ASM51, EEDIT) TECLADO E LCD.")
12
KIT AES-51

13
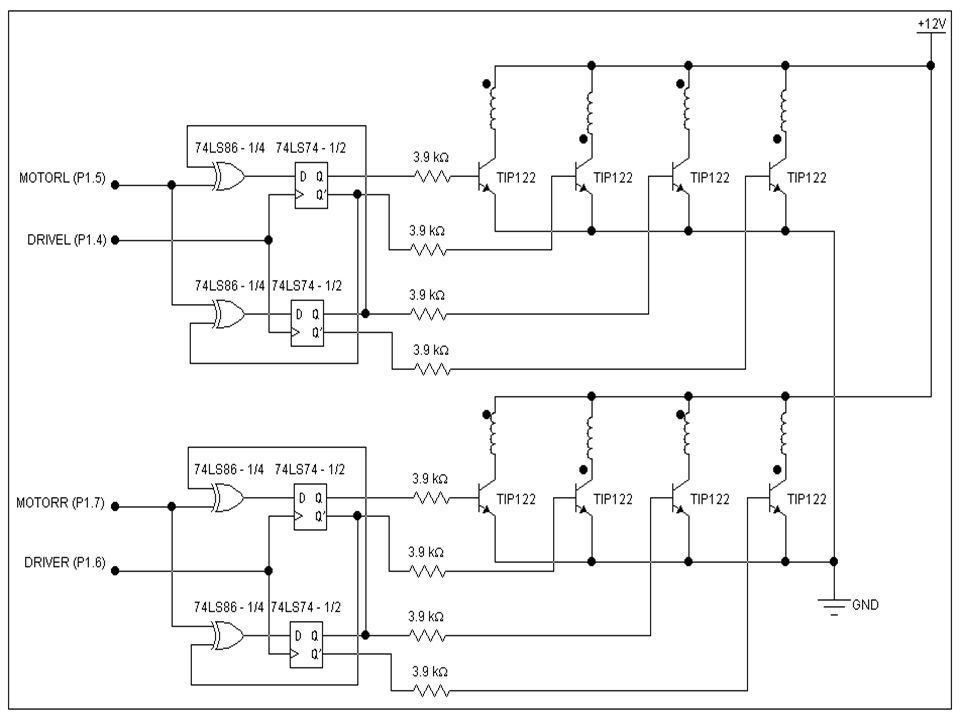
PLACA DE ACIONAMENTO DOS MOTORES
PULSOE SR CIRCUITO LÓGICO PARA ACIONAMENTO DOS MOTORES CIRCUITO DE POTÊNCIA PARA ACIONAMENTO DOS MOTORES MOTORES DE PASSO TRANSISTORES DE POTÊNCIA – TIP122 MÁQUINA SEQUENCIAL – FLIP-FLOPS D E PORTAS AND.

14
DRIVER DE POTÊNCIA

16
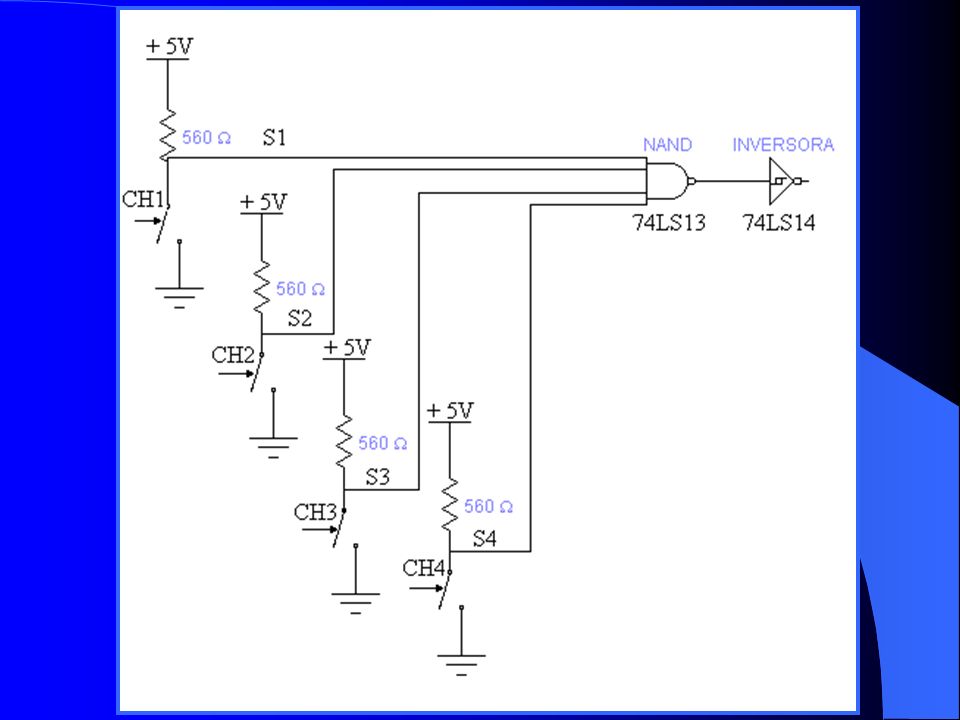
DETECTORES DE COLISÃO SENSORES DE CONTATO
IMPPLEMENTAÇÃO UTILIZANDO INTERRUPÇÃO – INT1

20
COMUNICAÇÃO SERIAL PORTA SERIAL COM1 PARÂMETROS DA COMUNICAÇÃO
BAUD RATE: 9600 PALAVRA DE 8 BITS 1 STOP BIT SEM PARIDADE

21
PROGRAMAÇÃO DA TRAJETÓRIA (ROMEO)
FUNCIONAMENTO PROGRAMAÇÃO DA TRAJETÓRIA (ROMEO) CARREGAR NA PLATAFORMA PROGRAMA QUE EXECUTA OS MOVIMENTOS ENVIAR DADOS DE MOVIMENTO PARA A PLATAFORMA DESCONECTAR CABO DE COMUNICAÇÃO SERIAL EXECUTAR O MOVIMENTO
 CARREGAR NA PLATAFORMA PROGRAMA QUE EXECUTA OS MOVIMENTOS. ENVIAR DADOS DE MOVIMENTO PARA A PLATAFORMA. DESCONECTAR CABO DE COMUNICAÇÃO SERIAL. EXECUTAR O MOVIMENTO.")
22
CODIFICAÇÃO UTILIZADA
TIPO MOVIMENTO SUBTIPO AMPLITUDE 1 FRENTE LADO 2 DIAGONAL TRÁS 3 ROTAÇÃO HORÁRIA 45O 90O 135O 4 ROTAÇÃO ANTI-HORÁRIA

23
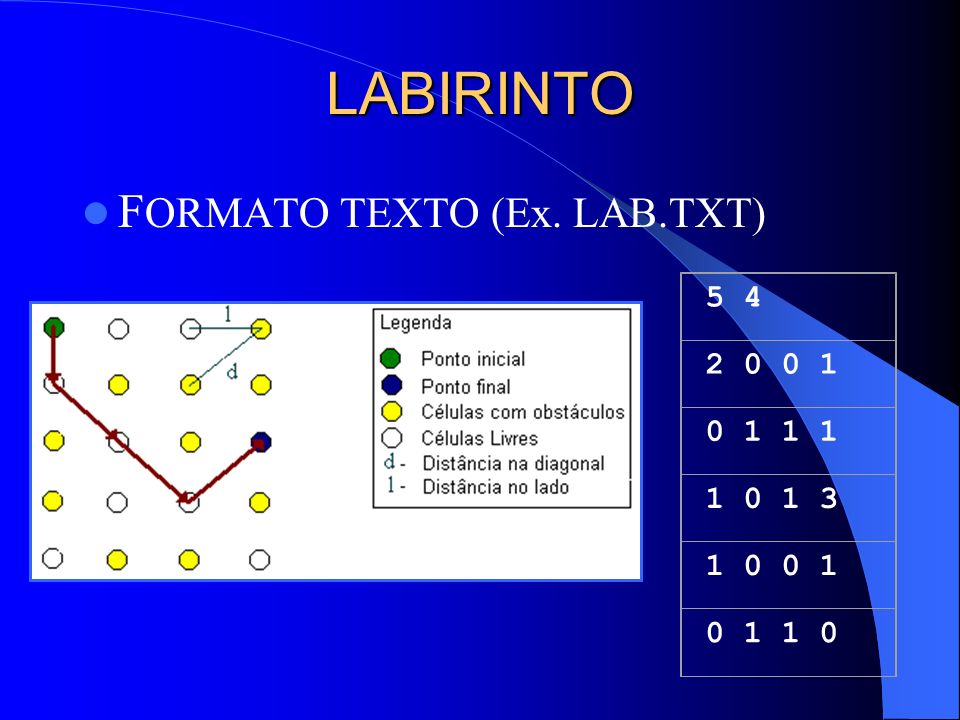
FLUXO DE INFORMAÇÕES DO LABIRINTO
ROMEO (Turbo C) LABIRINTO(Texto) TABM_NEW (Texto) MOVEA (Assembly) SEND (Turbo C) (PORTA SERIAL)
 LABIRINTO(Texto) TABM_NEW (Texto) MOVEA (Assembly) SEND (Turbo C) (PORTA SERIAL)")
24
LABIRINTO FORMATO TEXTO (Ex. LAB.TXT) 5 4 2 0 0 1 0 1 1 1 1 0 1 3
25
PROGRAMA ROMEO.CPP 2. PROCURA A 1. LÊ LABIRINTO 3. ABRE ARQUIVO
A PARTIR DE ARQUIVO TEXTO 2. PROCURA A TRAJETÓRIA UTILIZANDO O ALGORITMO A* 3. ABRE ARQUIVO TABM_NEW PARA ESCRITA 4. GRAVA A SEQUENCIA DE MOVIMENTOS CODIFICADA NO ARQUIVO DE SAÍDA 5. ENCERRA O PROGRAMA CARACTERE ‘A’ 6. FECHA ARQUIVO DE SAÍDA 7. INTERFACE GRÁFICA PARA VISUALIZAÇÃO DA PROCURA DA TRAJETÓRIA

26
ARQUIVO DE SAÍDA TABM_NEW.TXT
003 006 009 004 1 ; 1 4 ; 1 1 ; 2 4 ; 2 A ESTRUTURA VARIÁVEIS CONTENDO O NÚMERO DE PULSOS ÁRA CADA MOVIMENTO; MOVIMENTO CODIFICADO EM TIPO E SUBTIPO.

27
TRANSLAÇÃO FRENTE NUM LADO ROTAÇÃO ANTI-HORÁRIA 45O
ROTAÇÃO 45O ROTAÇÃO 90O ROTAÇÃO 135O TRANSLAÇÃO – LADO TRANSLAÇÃO – DIAGONAL TRANSLAÇÃO FRENTE NUM LADO ROTAÇÃO ANTI-HORÁRIA 45O TRANSLAÇÃO FRENTE NUMA DIAGONAL ROTAÇÃO ANTI-HORÁRIA 90O TERMINADOR 003 006 009 004 1 ; 1 4 ; 1 1 ; 2 4 ; 2 A

28
PROGRAMA SEND.CPP 3. LÊ ARQUIVO 1. ABRE ARQUIVO DESCONSIDERANDO
TABM_NEW.TXT PARA LEITURA 2. CONFIGURA A TRANSMISSÃO 3. LÊ ARQUIVO DESCONSIDERANDO OS CARACTERES NÃO VÁLIDOS 4. ENVIA DADOS PARA PORTA SERIAL VERIFICANDO O BUFFER 5. FECHA O ARQUIVO

29
PROGRAMA SEND.CPP

30
PROGRAME MOVEA.ASM PROGRAMA EXECUTADO NO MICROCONTROLADOR
DIVIDIDO EM TRÊS PARTES: RECEPÇÃO DE DADOS TRATAMENTO DOS DADOS EXECUÇÃO DO MOVIMENTO INTERRUPÇÃO PARA ROTINA DE COLISÃO

31
PROGRAMA MOVEA.ASM 1. INICIALIZAÇÃO DAS VARIÁVEIS DE PROGRAMA
2. PARTE 1: RECEPÇÃO DOS DADOS 3. PARTE 2: TRATAMENTO 4. PARTE 3: EXECUÇÃO DO MOVIMENTO ROTINA DE DE COLISÃO

32
PROGRAMA MOVEA.ASM MEMÓRIA
1. MEMÓRIA DE DADOS 2. MEMÓRIA DE PROGRAMA TABELA DE MOVIMENTOS TEXTOS DO PROGRAMA CÓDIGO DO PROGRAMA

33
PROGRAMA MOVEA.ASM PARTE 1
1. CONFIGURAÇÕES DA COMUNICAÇÃO SERIAL BAUD RATE: 9600 1 STOP BIT PALAVRA DE 8 BITS SEM PARIDADE 2. AGUARDA DADO (INTERRUPÇÃO) 3. GRAVAÇÃO AUTOMÁTICA DA TABELA DE MOVIMENTO NA MEMÓRIA
 3. GRAVAÇÃO AUTOMÁTICA DA TABELA DE MOVIMENTO NA MEMÓRIA.")
34
PROGRAMA MOVEA.ASM PARTE 2
15 PRIMEIROS BYTES RECEBIDOS - ROTAÇÃO 45O - ROTAÇÃO 90O - ROTAÇÃO 135O TRANSLAÇÃO LADO DIAGONAL CENTENA DEZENA UNIDADE 1O BYTE 2O BYTE 3O BYTE

35
PROGRAMA MOVEA.ASM PARTE 3
INPUT OUTPUT ROTAÇÃO 45O ROTAÇÃO 90O ROTAÇÃO 135O TRANSLAÇÃO LADO TRANSLAÇÃO DIAGONAL PULSO e SR (MOTOR ESQUERDO) (MOTOR DIREITO) TESTE DE TIPOS E SUBTIPOS
 (MOTOR DIREITO) TESTE DE TIPOS E SUBTIPOS.")
36
TESTES MEDIDAS NA PLATAFORMA AQUISIÇÃO DOS SINAIS GERADOS
MOVIMENTO PROPRIAMENTE DITO

37
MEDIDAS

38
AQUISIÇÃO DE DADOS PULSO

39
AQUISIÇÃO DE DADOS

40
MOVIMENTO X SENTIDO DE ROTAÇÃO DOS MOTORES
MOVIMENTO BIT DE SR DO MOTOR ESQUERDO BIT DE SR DO MOTOR DIREITO TRANSLAÇÃO PARA FRENTE 1 TRANSLAÇÃO PARA TRÁS ROTAÇÃO HORÁRIA ROTAÇÃO ANTI-HORÁRIA

41
AQUISIÇÃO DE DADOS

42
MOVIMENTO PROPRIAMENTE DITO
ROMEO

43
PROPOSTA PARA NOVOS TRABALHOS
IMPLEMENTAÇÃO DAS VARIÁVEIS EM DOIS BYTES; COMANDO E MONITORAÇÃO VIA INTERNET. IMPLEMENTAÇÃO DE SENSORES QUE DETECTEM OBJETOS; IMPLEMENTAÇÃO DE COMUNICAÇÃO VIA RÁDIO PARA CONTROLE DA TRAJETÓRIA; IMPLEMENTAÇÃO DE MOTORES DE CORRENTE CONTÍNUA;

44
AGRADECIMENTOS AOS ORIENTADORES À FAPESP

Apresentações semelhantes





 http://www.prof2000.pt/users/lpa.>")














