Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Inversores » Rodrigo Balani N˚ 042373 » Luiz Felipe Perrella N˚ 051273

2
Inversores A eletrônica de potência, vem com o passar do tempo, tornando mais fácil (e mais barato) o acionamento de motores. Com isto, sistemas que antes usavam motores CC, pela facilidade de controle, hoje podem usar motores CA de indução graças aos Inversores. Em paralelo com o avanço da eletrônica de potência, a microeletrônica, por meio de microprocessadores e microcontroladores, tem auxiliado muito o acionamento de máquinas CA, deixando os Inversores de Freqüência com funções cada vez mais complexas.

3
O que são? Inversores são dispositivos eletrônicos que convertem a tensão da rede alternada senoidal, em tensão contínua de amplitude e freqüência constantes e finalmente convertem esta última, em uma tensão de amplitude e freqüência variáveis. Além disso, hoje em dia, eles possuem muitas outras funções que auxiliam no controle de motores entre outras coisas.

4
Aplicações Destinados inicialmente a aplicações mais simples, os inversores de freqüência são atualmente encontrados nos mais diversos usos, desde o acionamento de bombas até complexos sistemas de automação industrial. Grande parte das aplicações como bombas, ventiladores e máquinas simples, necessitam apenas de variação de velocidade e partidas suaves, sendo atendidas plenamente com o uso de inversores com tecnologia Escalar. Outras aplicações como elevadores, guinchos e bobinadeiras necessitam além da variação da velocidade, uma variação do torque, operações em baixíssima rotação e alta velocidade de resposta necessitam de inversores com tecnologia Vetorial de Fluxo

5
Diagrama de Blocos

6
Retificador A tensão de alimentação é do tipo tensão alternada trifásica ou monofásica com freqüência fixa (ex 3 x 380V/60Hz ou 1 x 220V/60Hz) A retificação pode ser feita de maneira controlada ou não controlada
 A retificação pode ser feita de maneira controlada ou não controlada")
7
Retificador

8
Circuito Intermediário O Circuito intermediário pode ser visto como um reservatório do qual o motor pode drenar energia através do inversor. Serve também para deixar a tensão pulsante em tensão contínua Tipos de circuito intermediário: - Inversor fonte de corrente - Inversor fonte de tensão - Circuito intermediário com tensão CC variável

9
Circuito Intermediário Inversor fonte de corrente Inversor fonte de tensão

10
Circuito Intermediário Circuito intermediário com tensão CC variável

11
Inversor O inversor é a última conexão do inversor de freqüência antes do motor e o ponto final onde a adaptação da tensão de saída ocorre. Do circuito intermediário o conversor pode receber tanto: Uma corrente contínua variável Uma tensão contínua variável Uma tensão contínua constante. Em todos os casos o inversor assegura que a saída para o motor se torna variável. Em outras palavras, a freqüência para o motor é gerada no inversor. Se a corrente ou tensão são variáveis, o inversor gera apenas a freqüência. Se a tensão é constante o inversor gera a tensão e a freqüência.

12
Topologias Inversores Monofásicos Inversor monofásico em ponte Inversor monofásico em ponte com ponto médio Inversor Push-Pull Inversores Trifásicos

13
Inversores Monofásicos Inversor Monofásico em ponte Com carga resistiva CircuitoForma de Onda

14
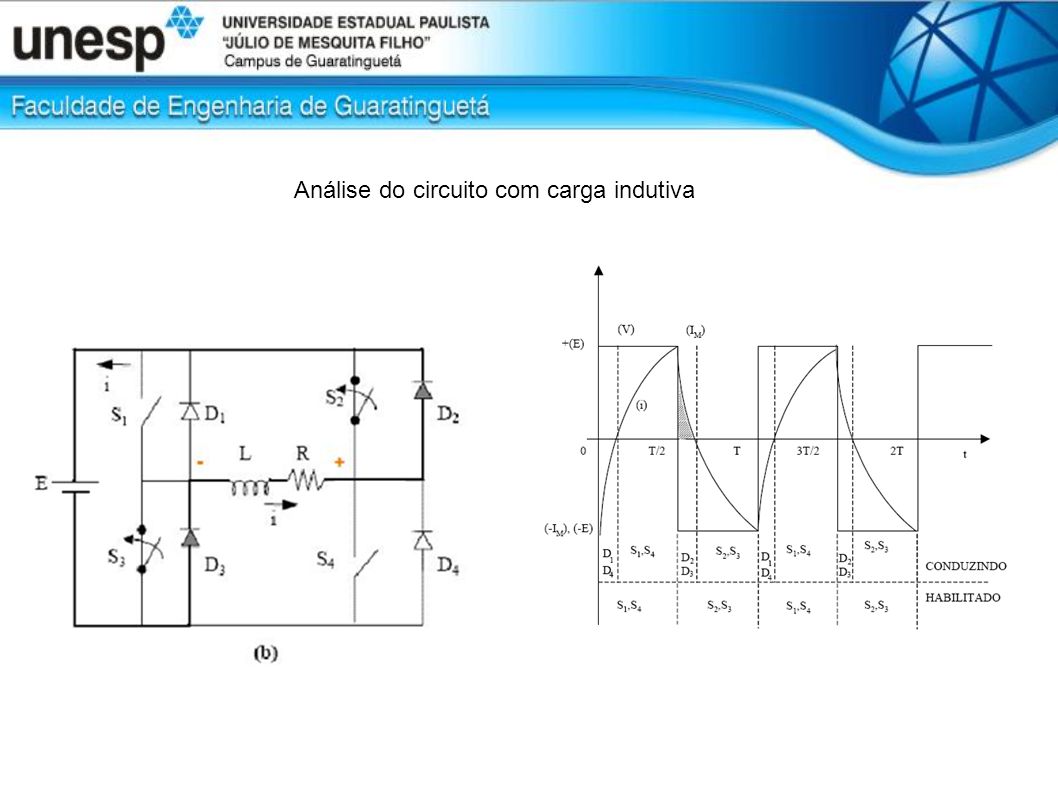
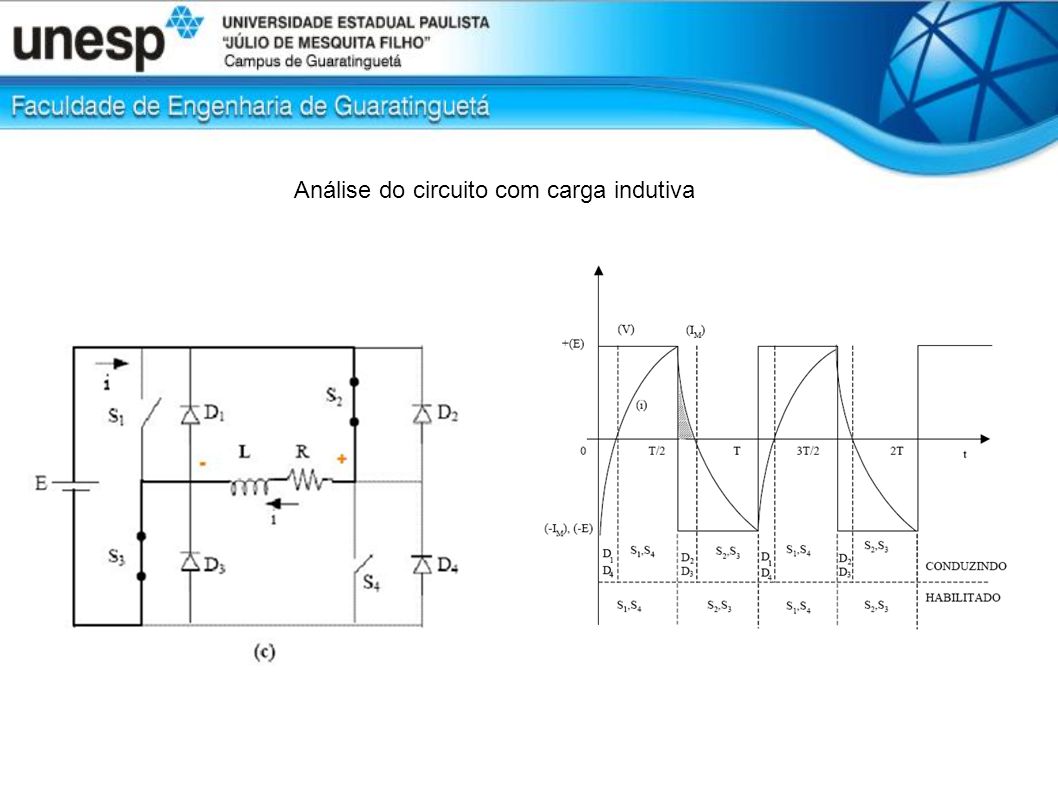
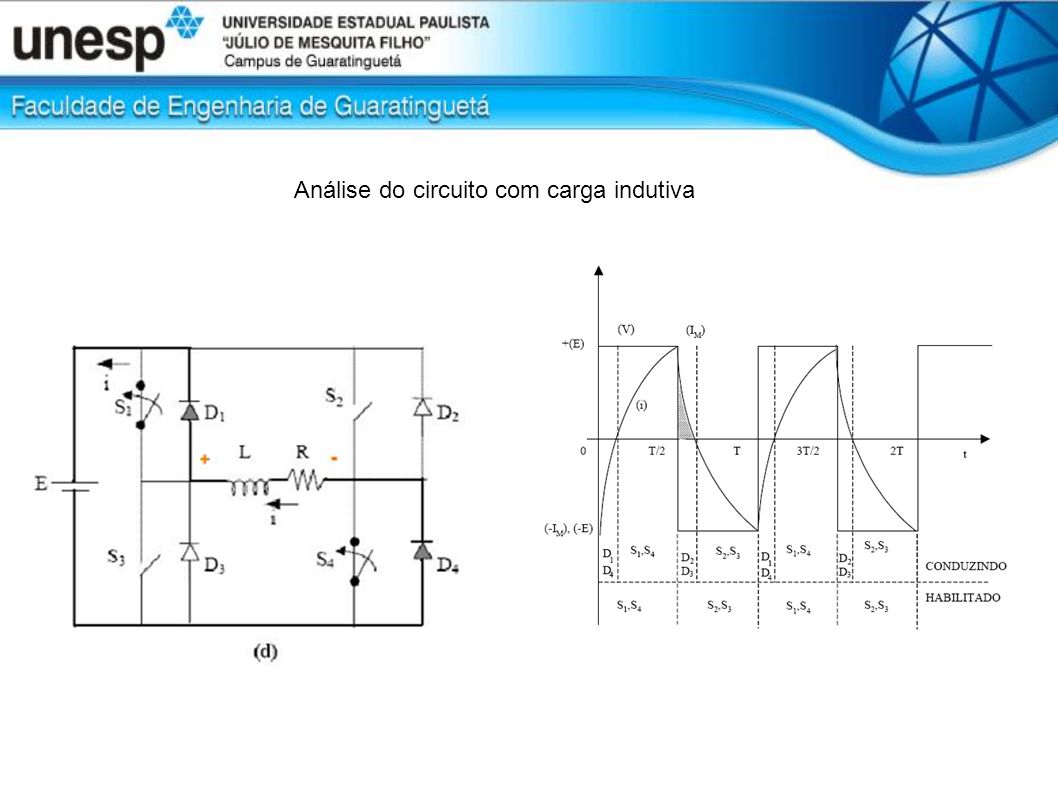
Com carga indutiva

15
Análise do circuito com carga indutiva

21
Inversor monofásico em ponte com ponto médio Principal vantagem: um único braço a ser comandado Principal desvantagem: tensão reduzida na saída (+/- E/2)
")
22
Inversor Push-Pull Emprega um transformador com ponto médio no primário Emprega apenas uma fonte CC Emprega apenas 2 chaves A carga é isolada da fonte

23
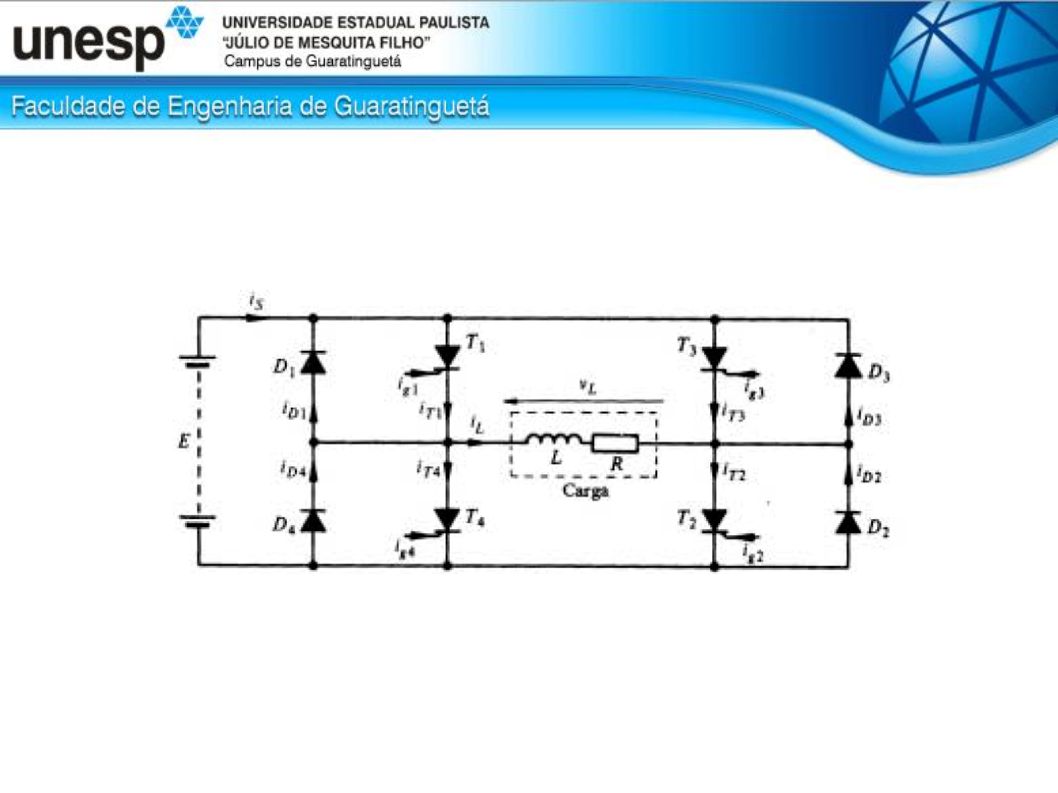
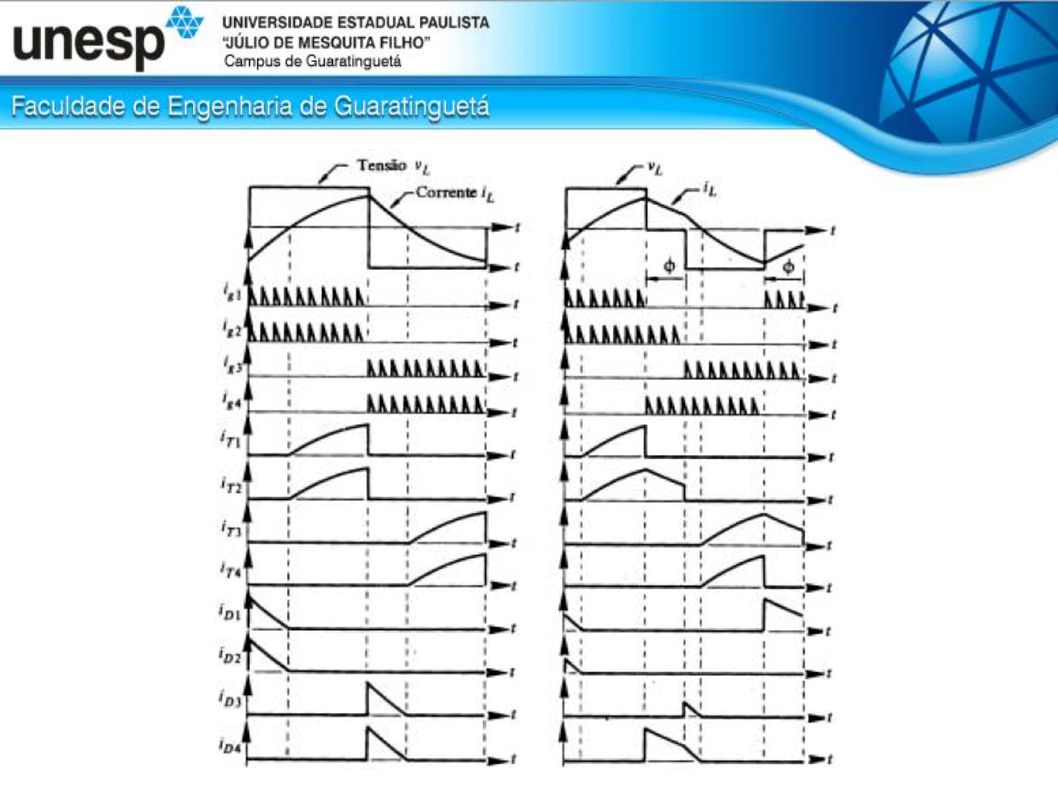
Inversor Trifásico Em cada instante existem 3 interruptores em condução Sempre 2 em um sentido e o outro, no sentido oposto Cada interruptor é mantido habilitado durante 180˚ havendo uma comutação a cada 60 ˚

24
Equações Trifásico

25
Então, juntando as equações anteriores, temos:

26
A potência entregue pela fonte é E Então: Analisando em função do ângulo Φ temos: Para : P > 0 ou seja o fluxo de potência vai da fonte para carga. Para : P = 0 ou seja, não há fluxo de potência Para : P < 0 ou seja o fluxo de potência vai da carga para a fonte. Para um ângulo Φ = Π apenas os diodos conduzem. A propriedade da reversibilidade é muito importante no acionamento de máquinas pelo fato de permitir a frenagem, com a inversão do sentido da corrente na fonte E. Reversibilidade dos Inversores

27
Controle de tensão nos inversores Controle de tensão na entrada do inversor - Amplamente usado. - Quando se trata de uma bateria, emprega-se um conversor CC-CC - Quando a entrada é a rede alternada, usa-se um retificador controlado. Controle de tensão na saída do inversor - Pouco usado pois é muito complicado e gera muitas harmônicas na saída Controle de tensão dentro do inversor - Defasagem - Modulação

28
Controle de tensão interno ao inversor Por Defasagem

30
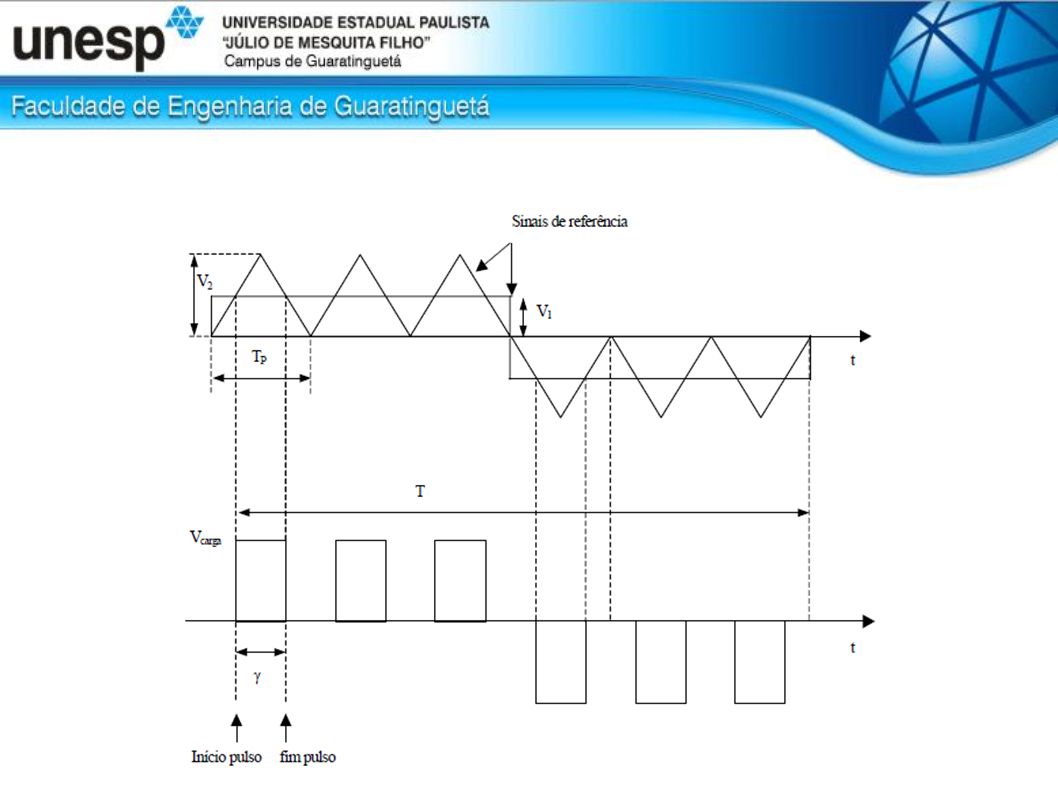
O valor de r é minimizado e assume o valor de 0,297 quando γ é 120˚. Na prática trabalha-se com r menor ou igual a 0,45. Assim, o valor eficaz da fundamental varia de 70% a 100% do seu valor máximo. Este método também é conhecido como Modulação por largura de um único pulso

31
Modulação por pulsos múltiplos e iguais entre si - PWM Linear Extensão do método anterior O número de pulsos dependerá da frequência do sinal de referência dente de serra para um T especificado A largura dos pulsos depende do valor de tensão V1 em relação a V2

33
Harmônicas consideravelmente atenuadas quando o valor da eficaz da fundamental torna-se inferior a 60% da tensão de entrada. Quanto maior o número de pulsos por período, mais fácil será a filtragem das harmônicas da tensão de carga

34
Modulação PWM Senoidal A frequência da fundamental é definida por uma senóide Os sinais de comando dos interruptores são estabelecidos por comparação dessa senóide com uma onda triangular Os dois sinais são sincronizados de modo que a relação entre as duas frequências seja um número N inteiro dado por:

35
Tensão na carga

36
Aplicação: Controle em malha aberta de um motor de máquina de lavar

37
Circuito do Motor Torque eletromagnético: P: número de polos; wr: velocidade angular do fluxo no rotor; Variáveis: Vm, ws e wr.

38
Controle por fluxo constante Fluxo constante no entreferro: Vm não pode ser medida diretamente. Aproximação: Vs/ws constante nos terminais do motor.

39
Dificuldades do Projeto Frequência da portadora x tempo de processamento; Processadores: performance x custo; Baixas frequências: alta necessidade de memória.

40
Geração PWM discreta, sincronizada e otimizada Discreta Relação V/f constante; Velocidades tabeladas em memória para leitura; Vn e fn: valores nominais.

41
Geração PWM discreta, sincronizada e otimizada Sincronizada Transição entre frequências: variação zero de amplitude; Detecção de zeros; Aceleração suavizada, passando pelas frequências adjacentes.

42
Otimizada onde fa = frequência alvo ts = período de amostragem N = amostras por período da portadora frequência real: Geração PWM discreta, incronizada e otimizada

Apresentações semelhantes




>")
 que convertem potência DC em potência AC com frequência e tensão ou corrente de saída desejada.>")













: sincronismo de tarefas,>")
