Carregar apresentação
A apresentação está carregando. Por favor, espere

1
SUPERVISÃO E CONTROLE OPERACIONAL DE SISTEMAS
Prof. André Laurindo Maitelli DCA-UFRN

2
Controladores Lógicos Programáveis (CLPs)
")
4
CLP em um sistema SCADA

5
Definição É um equipamento digital que usa memória programável para armazenar instruções que implementam funções como: lógica, sequenciamento, temporização, contagem e operações aritméticas, para controlar através de módulos de entrada e saída (digital e analógica) diversos tipos de máquinas e processos.
 diversos tipos de máquinas e processos.")
6
Histórico Sistemas eletromecânicos: baixa confiabilidade, pouca flexibilidade e grande consumo de energia 1968: divisão de hidramáticos da GM Década 70: microprocessadores deram impulso ao CLP Década de 80: uso no Brasil Década de 90: grande evolução

7
Características do CLP
Fácil diagnóstico de funcionamento ainda em fase de projeto do sistema e/ou reparos que venham a ocorrer em sua operação Pode ser instalado em cabines reduzidas devido ao pequeno espaço físico exigido Operam com reduzido grau de proteção, pelo fato de não serem geradores de faiscamentos Facilmente reprogramado sem a necessidade de interromper o processo produtivo (programação on-line)
")
8
Características do CLP
Possibilitam a criação de um banco de armazenamento de programas que podem ser reutilizados a qualquer momento Baixo consumo de energia Maior confiabilidade pela menor incidência de defeitos Flexibilidade da expansão do número de entradas e saídas a serem controladas Capacidade de se comunicar com diversos outros equipamentos

9
Aplicações na Indústria
Painéis seqüenciais de intertravamento Controle de malhas Sistemas SCADA Sistemas de controle de estações Sistemas de controle de células da manufatura Processos de: empacotamento, engarrafamento, enlatamento, transporte e manuseio de materiais, usinagem, geração de energia; em sistemas de controle predial de ar condicionado, sistemas de segurança, montagem automatizada, linhas de pintura e sistemas de tratamento de água, existentes em indústrias de alimentos, bebidas, automotiva, química, têxtil, plásticos, papel e celulose, farmacêutica e siderúrgica/metalúrgica

10
Exemplo: Comando de um motor – antes do CLP

11
Exemplo: Comando de um motor – depois do CLP

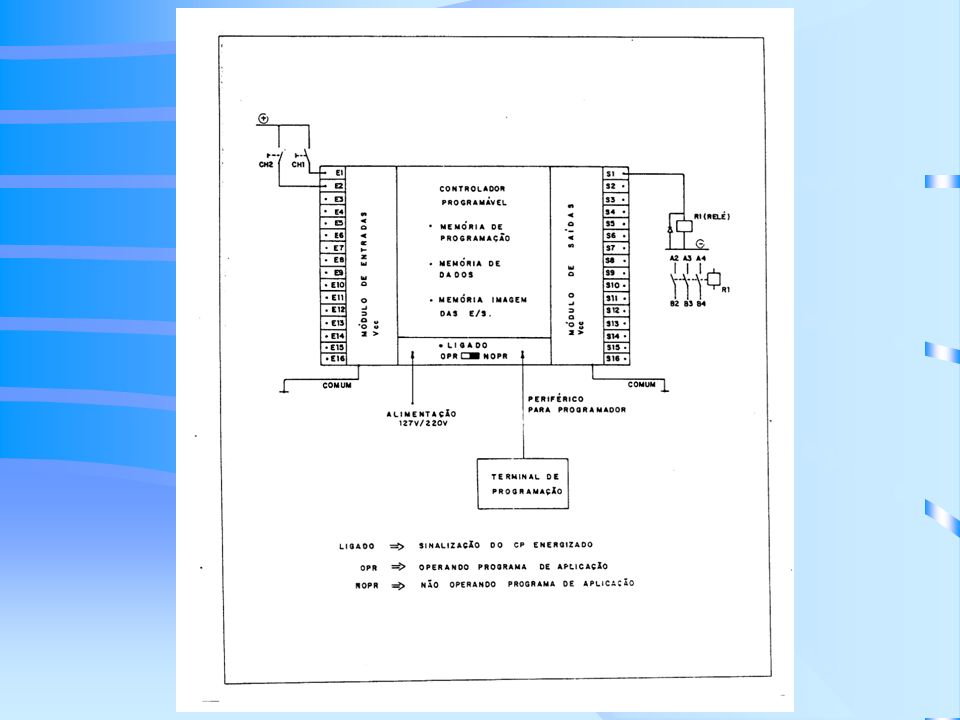
12
Diagrama de Blocos de um CLP

13
Componentes de um CLP Fonte de alimentação CPU Memória
Módulos de entrada e saída Linguagens de programação Dispositivos de programação Módulos de comunicação Racks

14
Módulos de um CLP

15
Componentes - Fonte Alimenta a CPU e demais dispositivos
Converte AC em DC O CLP possui uma bateria interna

16
Princípio de funcionamento:
Componentes - CPU Princípio de funcionamento: Execução, por parte da CPU, de um programa que realiza continuamente um ciclo de varredura, com os seguintes passos: a) Obtenção dos dados dos vários módulos de entrada; b) Execução das instruções do programa c) Atualização das saídas, transferindo os dados ao equipamento controlável através dos módulos de saída
 Obtenção dos dados dos vários módulos de entrada; b) Execução das instruções do programa. c) Atualização das saídas, transferindo os dados ao equipamento controlável através dos módulos de saída.")
17
Componentes - CPU

18
Componentes - Memórias
Do Programa Executivo: não-volátil Do usuário: De dados: controle do programa do usuário Imagem das entradas e saídas: interligação entre o CLP e os equipamentos

19
Memória do Programa Executivo
O gerenciamento de todo o sistema composto pelo CLP é efetuada através da execução de um programa inserido nesta parte da memória e, denominado de programa executivo. Não-volátil Responsabilidade do fabricante do equipamento

20
Memória do Usuário Armazena o programa do usuário
Contém alguns Kbytes de palavras-livres que serão processadas pela CPU A cada ciclo, a CPU processa este programa, atualiza a memória de dados internos e as imagens das entradas e saídas

21
Memória de Dados Nesta área se encontram dados referentes ao processamento do programa do usuário

22
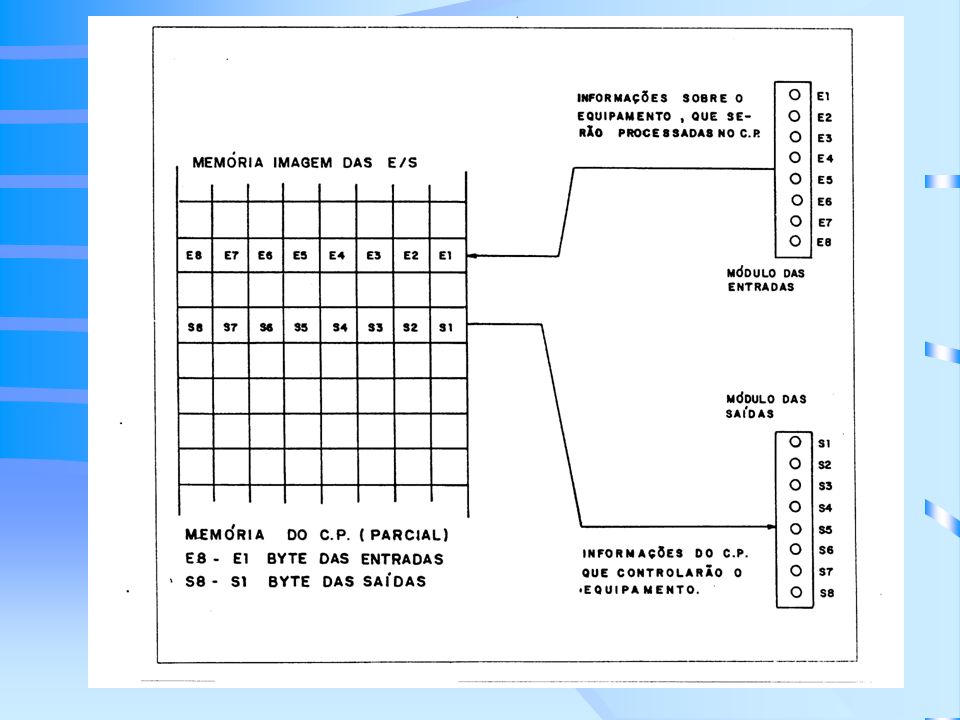
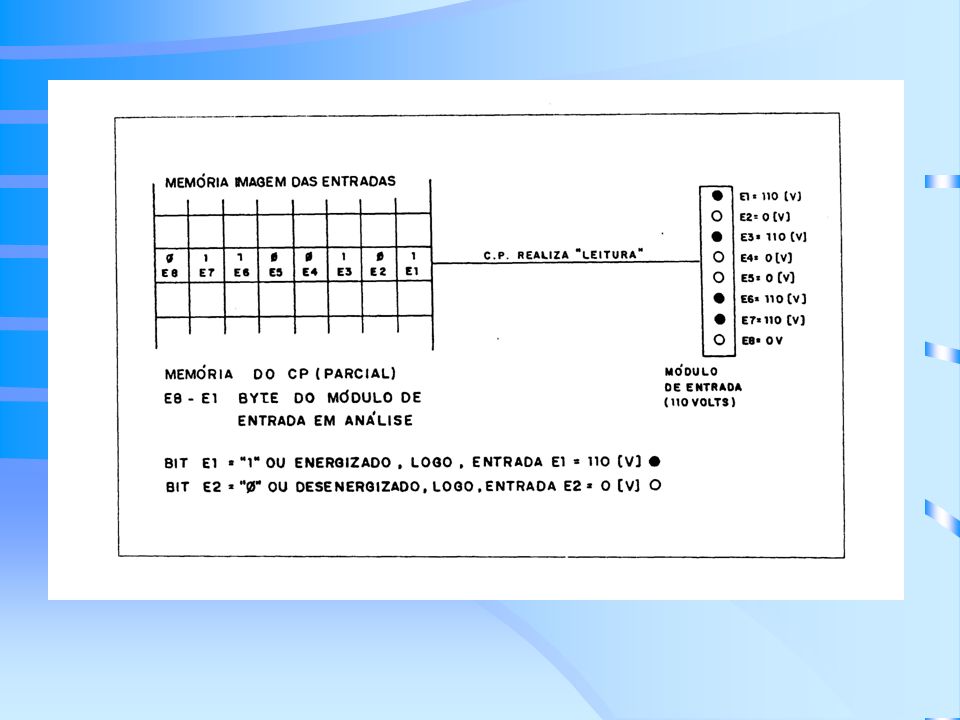
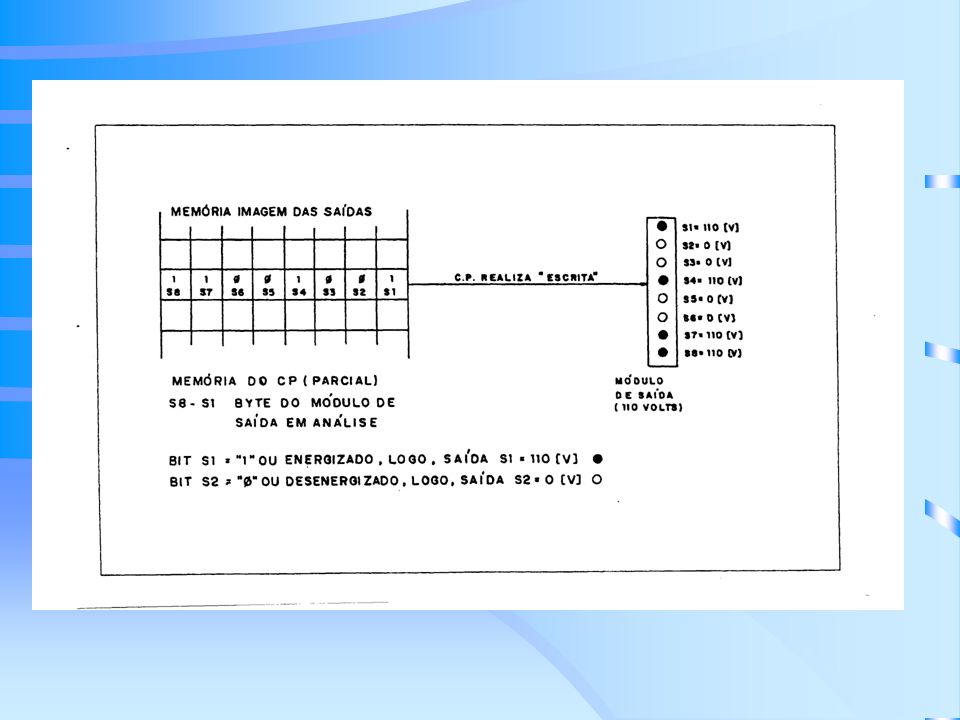
Memória Imagem das Entradas e Saídas
Área de memória reservada para a interligação entre Controladores Lógicos Programáveis e os equipamentos Esta memória é a imagem real das entradas e saídas do CLP

26
Componentes: Módulos de Entradas e Saídas
Realizam a conexão física entre a CPU e o mundo externo, através de circuitos de interfaceamento

27
Módulos de Entrada Os módulos de entradas tem que ser seguros contra destruição das entradas por excesso ou alimentação de tensão indevida; e devem possuir filtros de supressão para impulsos parasitórios

28
Módulos de Saída Os módulos de saída devem ser amplificados e possuir proteção contra curto-circuito

29
Os módulos de entradas e saídas podem ser subdivididos em dois grupos distintos: digitais (discretos) e analógicos (numéricos).
 e analógicos (numéricos).")
30
Entradas e Saídas Digitais
São os tipos de sinais mais comuns encontrados em sistemas automatizados com CLP. Nestes tipos de interface a informação consiste em um estado binário da variável de controle (ligado ou desligado)
")
31
Exemplos Entradas digitais: chaves seletoras, sensores fotoelétricos, chaves de fim de curso, sensores de proximidade, etc Saídas digitais: alarmes, ventiladores, lâmpadas, solenóides, etc

32
Interface típica para entrada de sinais em CA/CC

33
Interface típica para saída de sinais em CA

34
Entradas e Saídas Analógicas
A diferença básica com relação às entradas e saídas discretas é que aqui mais de um Bit deverá ser manipulado, seja paralelamente (todos ao mesmo tempo) ou serialmente (um Bit de cada vez), a fim de se controlar a grandeza física do processo em questão.
 ou serialmente (um Bit de cada vez), a fim de se controlar a grandeza física do processo em questão.")
35
Exemplos Entradas Analógicas: transdutor de temperatura, pressão, transdutores óticos, de umidade, de fluxo, conversor D/A, etc Saídas Analógicas: válvula analógica, acionamento de um motor, atuador analógico, etc

36
Interface típica para entrada/saída de sinais analógicos

37
Módulos de Comunicação
São responsáveis principalmente pela ligação do CLP com os seus periféricos: terminais de vídeo, impressoras, instrumentos digitais e quaisquer instrumentos que possam se comunicar através de portas seriais tipo RS-232. Podem ser: ASCII, Adaptador de E/S Remotas, Serial e Interface de Redes.

38
Módulos de Comunicação ASCII
São usados para enviar e receber dados alfanuméricos de equipamentos periféricos para o controlador Geralmente este módulo possui processador e memória próprios que executam as tarefas de transferência de dados

39
Módulos Adaptadores de E/S Remotas
São usados em controladores geralmente de grande porte e permitem a instalação de sistemas de E/S localizados a distancias maiores da CPU principal Os subsistemas de E/S são geralmente conectados usando uma configuração serial ou estrela A comunicação pode ser feita através de par trançado, cabo coaxial ou fibra óptica.

40
Elos de Comunicação em Rede
Para executar estas tarefas de comunicação, os fabricantes de CLP implementaram módulos de comunicação que permitem a integração de um CLP a outros CLPs e a computadores corporativos Estes módulos geralmente adotam padrões de comunicação em rede como Ethernet ou proprietárias que permitem a troca de informações entre computadores e os controladores programáveis

41
Elos de Comunicação em Rede
Os módulos de rede hoje oferecidos pelos fabricantes permitem opções como a de execução de controle distribuído, onde vários controladores de pequeno porte controlam células de produção Estas células interligadas via rede podem ter sua operação supervisionadas por estações baseadas em microcomputadores ou computadores

42
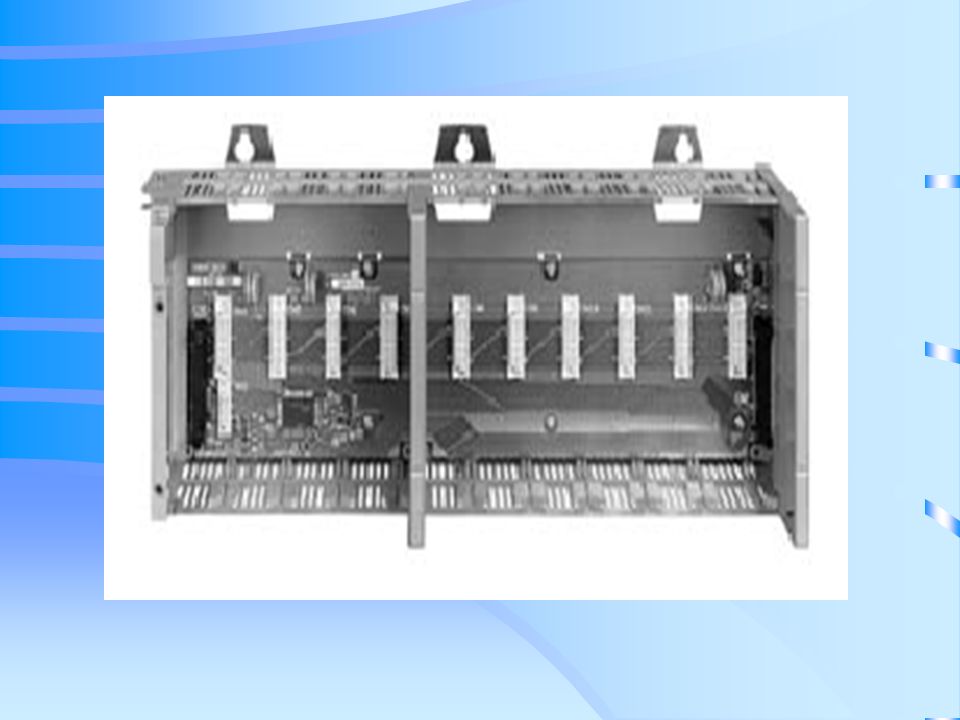
Rack do CLP A base ou rack é responsável pela sustentação mecânica dos elementos que compõem o CLP Contém o barramento que faz a conexão elétrica entre eles, no qual estão presentes os sinais de dados, endereço e controle necessários para que a CPU e os módulos de entrada/saída possam operar

44
Linguagens de Programação
Introdução

45
Linguagens de Programação de CLPs
As linguagens de programação permitem aos usuários se comunicar com o CLP através de um dispositivo de programação e definir as tarefas que o CLP deve executar. As linguagens mais usadas são: - Diagrama de Contatos (Ladder Diagram) e - Lista de Instruções (Statement List)
 e. - Lista de Instruções (Statement List)")
46
LADDER É um diagrama de relés cujos símbolos representam:
- contatos normalmente abertos | |- - contatos normalmente fechados -| / |- - saída, representando a bobina ( )-
-")
47
Exemplo S1 S2 Y1 -------[ ]------[ / ]-------------------( )--------
[ ]------[ / ] ( ) Se a entrada S1 for verdadeira e a entrada S2 for falsa, a saída Y1 será ativada
![Exemplo S1 S2 Y [ ]------[ / ] ( )](http://slideplayer.com.br/slide/377071/3/images/47/Exemplo+S1+S2+Y+%5B+%5D------%5B+%2F+%5D+%28+%29.jpg "[ ]------[ / ] ( ) Se a entrada S1 for verdadeira e a entrada S2 for falsa, a saída Y1 será ativada.")
48
Exemplo: Comando de um Motor

50
Exemplo de Aplicação - Estampador de Peças

51
Entradas S1: sensor de final de curso do cilindro 1
FS: foto-sensor de peça PTD: chave de partida

52
Saídas EV1: eletroválvula de comando do cilindro 1
EV4: eletroválvula para ar comprimido

53
Dispositivos de Programação
A programação de CLPs é realizada através de dispositivos de programação separados que são compartilhados por vários CLPs de uma instalação Pode ser : off-line ou on-line O uso de PCs como ferramenta de programação tem grande aceitação

54
Dispositivos de Programação

Apresentações semelhantes