Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Automação do tráfego de veículos: sistema de busca de caminho de menor custo entre dois pontos Richard Beyer Schroeder Orientador: Aurélio Faustino Hoppe 01/2012

2
1.Motivação 2.Trabalhos relacionados 3.Objetivos 4.Requisitos 5.Solução proposta 6.Implementação 7.Experimentos 8.Conclusão 9.Limitações 10.Extensões 11.Demonstração SUMÁRIO

3
MOTIVAÇÃO Quanto tempo você perde diariamente no trânsito?

4
Google Maps Google Maps Navigation GPS Airis Mobile Millennium TRABALHOS RELACIONADOS

5
Google Maps TRABALHOS RELACIONADOS Características: - Exibir o mapa das cidades - Visualização das condições de tráfego através de cores

6
Google Maps Navigation TRABALHOS RELACIONADOS Características: - Narração do trajeto percorrido - Evitar ruas congestionadas

7
GPS Airis TRABALHOS RELACIONADOS Características: - Evitar ruas congestionadas - Recepção das condições do trânsito através de Frequência Modulada (FM)
")
8
Mobile Century TRABALHOS RELACIONADOS Características: - Experimento - Define as condições do tráfego baseando-se em dispositivos móveis com GPS

9
Características / trabalhos correlatos Google Maps (2011) Google Maps Navigation (2011) GPS Airis (2011) Mobile Century (2008) Obtenção de rota de menor custo-XX- Envio de informações de condições de tráfego-X-X Visualização das condições de tráfego das viasXXXX TRABALHOS RELACIONADOS TrabalhoLIMITAÇÕES Google Maps disponível apenas em grandes cidades processo de definição de ruas congestionadas não divulgado, bem como processo de colaboração dos usuários Google Maps Navigation GPS Airis depende de provedores de informações de condições de tráfego por Frequência Modulada (FM) Presente em todos baixo nível de adesão de novas cidades dependência da corporação para concepção do mapa
 Google Maps Navigation (2011) GPS Airis (2011) Mobile Century (2008) Obtenção de rota de menor custo-XX- Envio de informações de condições de tráfego-X-X Visualização das condições de tráfego das viasXXXX TRABALHOS RELACIONADOS TrabalhoLIMITAÇÕES Google Maps disponível apenas em grandes cidades processo de definição de ruas congestionadas não divulgado, bem como processo de colaboração dos usuários Google Maps Navigation GPS Airis depende de provedores de informações de condições de tráfego por Frequência Modulada (FM) Presente em todos baixo nível de adesão de novas cidades dependência da corporação para concepção do mapa")
10
Protótipo com capacidade para apresentar a rota de menor tempo entre dois pontos em uma malha viária - Colaboração dos usuários do protótipo para identificação das condições de tráfego - Construção dinâmica da representação computacional da malha viária de uma cidade - Cálculo da rota de menor custo baseada nas estatísticas de tráfego OBJETIVOS

11
REQUISITOS RF01 - Enviar informações de coordenadas geográficas para um servidor na web

12
RF02 - Disponibilizar interface para informar um endereço de origem e destino através de coordenadas geográficas REQUISITOS

13
RF03 - Exibir no dispositivo uma rota de menor custo que será calculada no servidor entre a coordenada de origem e destino informada

14
REQUISITOS RF03 - Exibir no dispositivo uma rota de menor custo que será calculada no servidor entre a coordenada de origem e destino informada

15
REQUISITOS RF03 - Exibir no dispositivo uma rota de menor custo que será calculada no servidor entre a coordenada de origem e destino informada

16
REQUISITOS RF03 - Exibir no dispositivo uma rota de menor custo que será calculada no servidor entre a coordenada de origem e destino informada

17
REQUISITOS RF03 - Exibir no dispositivo uma rota de menor custo que será calculada no servidor entre a coordenada de origem e destino informada

18
Itajaí Pres Castelo Branco Martin Luher Antonio da Veiga REQUISITOS RF03 - Exibir no dispositivo uma rota de menor custo que será calculada no servidor entre a coordenada de origem e destino informada

19
SOLUÇÃO PROPOSTA

22
?
23
-Protótipo capaz de retornar a rota de menor custo e contribuir na coleta de estatísticas do trânsito

24
IMPLEMENTAÇÃO Coleta de dados Geração da malha viária Cálculo da rota de menor custo

25
IMPLEMENTAÇÃO Coleta de dados

26
IMPLEMENTAÇÃO Coleta de dados

27
IMPLEMENTAÇÃO Coleta de dados

28
Velocidade Distância IMPLEMENTAÇÃO Coleta de dados

29
Velocidade Distância IMPLEMENTAÇÃO Coleta de dados

30
IMPLEMENTAÇÃO Geração da malha viária

31
IMPLEMENTAÇÃO Geração da malha viária

32
IMPLEMENTAÇÃO Geração da malha viária

33
IMPLEMENTAÇÃO Geração da malha viária

34
IMPLEMENTAÇÃO Geração da malha viária

35
IMPLEMENTAÇÃO Geração da malha viária

36
IMPLEMENTAÇÃO Geração da malha viária

37
IMPLEMENTAÇÃO Geração da malha viária

38
IMPLEMENTAÇÃO Geração da malha viária

39
IMPLEMENTAÇÃO Geração da malha viária

40
IMPLEMENTAÇÃO Geração da malha viária

41
IMPLEMENTAÇÃO Geração da malha viária

42
IMPLEMENTAÇÃO Geração da malha viária

43
IMPLEMENTAÇÃO Geração da malha viária

44
IMPLEMENTAÇÃO Geração da malha viária

45
IMPLEMENTAÇÃO Geração da malha viária

46
IMPLEMENTAÇÃO Geração da malha viária

47
IMPLEMENTAÇÃO Geração da malha viária

48
IMPLEMENTAÇÃO Geração da malha viária

49
IMPLEMENTAÇÃO Geração da malha viária

50
IMPLEMENTAÇÃO Geração da malha viária

51
IMPLEMENTAÇÃO Geração da malha viária

52
IMPLEMENTAÇÃO Geração da malha viária

53
IMPLEMENTAÇÃO Situação 1 - O usuário percorrer em totalidade uma rua que antes apenas havia sido percorrida de maneira parcial Situação 2 - O usuário percorrer a mesma seção de rua que já foi percorrida e mapeada por outro usuário Situação 3 - O usuário entrar em uma outra rua antes e percorrer até o final a rua que já havia sido percorrida antes Situação 4 - O usuário percorrer uma rua processada além do seu limite Situações a serem tratadas para gerar a malha viária:

54
IMPLEMENTAÇÃO Percurso efetuado pelo primeiro usuário Situação 1 - O usuário percorrer em totalidade uma rua que antes apenas havia sido percorrida de maneira parcial

55
IMPLEMENTAÇÃO 20 km/h Percurso efetuado pelo primeiro usuário Situação 1 - O usuário percorrer em totalidade uma rua que antes apenas havia sido percorrida de maneira parcial

56
IMPLEMENTAÇÃO Percurso efetuado pelo segundo usuário Situação 1 - O usuário percorrer em totalidade uma rua que antes apenas havia sido percorrida de maneira parcial

57
IMPLEMENTAÇÃO 20 km/h Situação 2 – O usuário percorrer a mesma seção de rua que já foi percorrida e mapeada por outro usuário

58
IMPLEMENTAÇÃO 18 km/h Situação 1 – O usuário percorrer em totalidade uma rua que antes apenas havia sido percorrida de maneira parcial Situação 2 – O usuário percorrer a mesma seção de rua que já foi percorrida e mapeada por outro usuário

59
IMPLEMENTAÇÃO 18 km/h 25 km/h Situação 1 – O usuário percorrer em totalidade uma rua que antes apenas havia sido percorrida de maneira parcial Situação 2 – O usuário percorrer a mesma seção de rua que já foi percorrida e mapeada por outro usuário

60
IMPLEMENTAÇÃO Situação 3 – O usuário entrar em uma outra rua antes e percorrer até o final a rua que já havia sido percorrida antes

61
IMPLEMENTAÇÃO Situação 3 – O usuário entrar em uma outra rua antes e percorrer até o final a rua que já havia sido percorrida antes

62
IMPLEMENTAÇÃO Situação 3 – O usuário entrar em uma outra rua antes e percorrer até o final a rua que já havia sido percorrida antes

63
IMPLEMENTAÇÃO Situação 4 – O usuário percorrer uma rua processada além do seu limite

64
IMPLEMENTAÇÃO Situação 4 – O usuário percorrer uma rua processada além do seu limite

65
IMPLEMENTAÇÃO Situação 4 – O usuário percorrer uma rua processada além do seu limite

66
IMPLEMENTAÇÃO Cálculo da rota de menor custo

67
IMPLEMENTAÇÃO Cálculo da rota de menor custo Algoritmo de Dijkstra

68
IMPLEMENTAÇÃO 32s 19s 40s 25s 23s 37s 13s Cálculo da rota de menor custo Algoritmo de Dijkstra

69
32s 19s 40s 25s 23s 37s 13s IMPLEMENTAÇÃO Cálculo da rota de menor custo Algoritmo de Dijkstra Origem

70
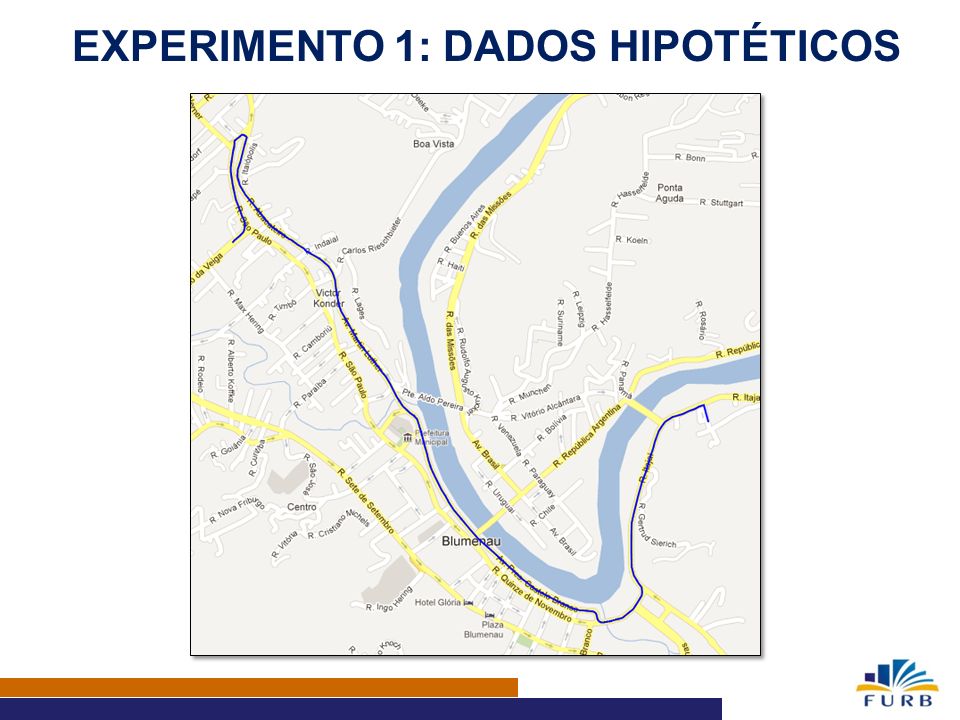
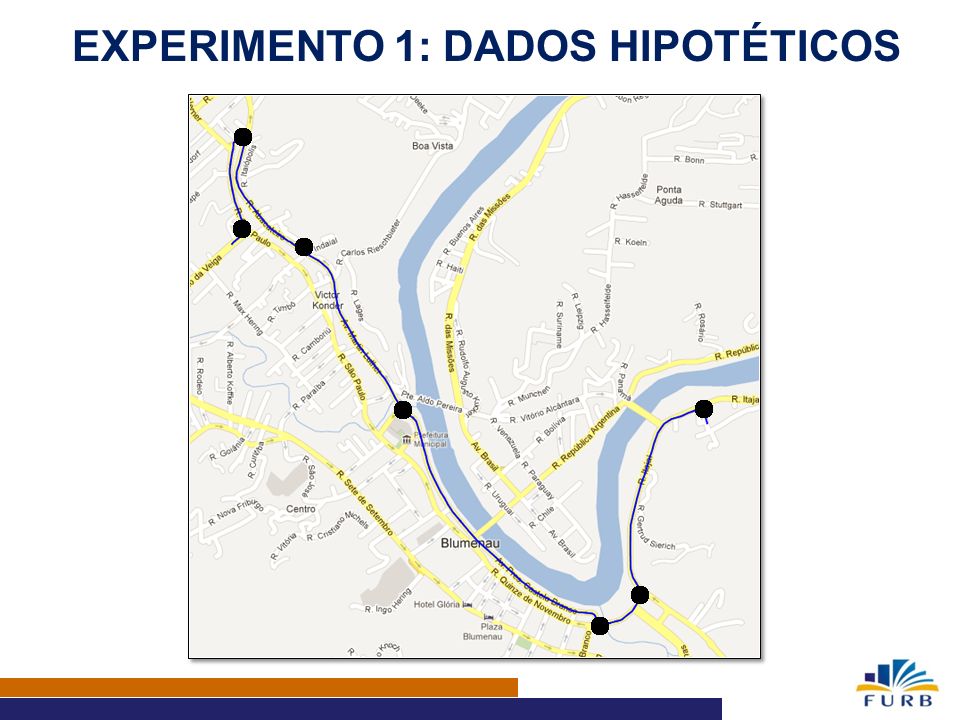
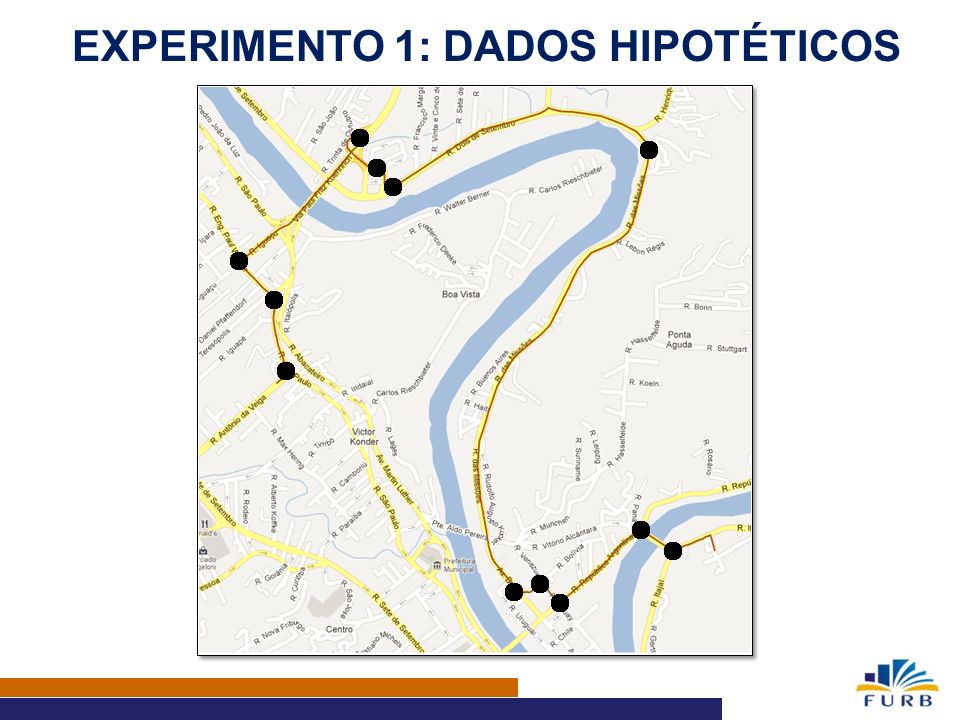
EXPERIMENTO 1: Testes efetuados com dados hipotéticos comprovar a correta geração do grafo representando a malha viária comprovar o funcionamento do cálculo da rota de menor custo, consequentemente o funcionamento de Dijkstra EXPERIMENTO 2: Teste em ambiente real comprovar o funcionamento da coleta de dados geográficos EXPERIMENTOS

71
Origem Destino EXPERIMENTO 1: DADOS HIPOTÉTICOS

74
5060 metros EXPERIMENTO 1: DADOS HIPOTÉTICOS

75
30 km/h 5060 metros EXPERIMENTO 1: DADOS HIPOTÉTICOS

76
30 km/h 10 minutos e 6 segundos 5060 metros EXPERIMENTO 1: DADOS HIPOTÉTICOS

79
7621 metros EXPERIMENTO 1: DADOS HIPOTÉTICOS

80
40 km/h 7621 metros EXPERIMENTO 1: DADOS HIPOTÉTICOS

81
40 km/h 11 minutos e 24 segundos 7621 metros EXPERIMENTO 1: DADOS HIPOTÉTICOS

82
10 minutos e 6 segundos EXPERIMENTO 1: DADOS HIPOTÉTICOS Obtendo a rota de menor custo SEM congestionamento

83
10 minutos e 6 segundos 11 minutos e 24 segundos EXPERIMENTO 1: DADOS HIPOTÉTICOS Obtendo a rota de menor custo SEM congestionamento

84
10 minutos e 6 segundos EXPERIMENTO 1: DADOS HIPOTÉTICOS Obtendo a rota de menor custo SEM congestionamento

85
10 minutos e 6 segundos 11 minutos e 24 segundos EXPERIMENTO 1: DADOS HIPOTÉTICOS Obtendo a rota de menor custo SEM congestionamento

86
20 km/h EXPERIMENTO 1: DADOS HIPOTÉTICOS Obtendo a rota de menor custo COM congestionamento

87
+ 2 minutos e 34 segundos 11 minutos e 24 segundos Obtendo a rota de menor custo COM congestionamento EXPERIMENTO 1: DADOS HIPOTÉTICOS

88
12 minutos e 40 segundos 11 minutos e 24 segundos EXPERIMENTO 1: DADOS HIPOTÉTICOS Obtendo a rota de menor custo COM congestionamento

89
EXPERIMENTO 1: DADOS HIPOTÉTICOS Obtendo a rota de menor custo COM congestionamento

90
12 minutos e 40 segundos 11 minutos e 24 segundos EXPERIMENTO 1: DADOS HIPOTÉTICOS Obtendo a rota de menor custo COM congestionamento

91
Coleta dos dados EXPERIMENTO 2: AMBIENTE REAL

92
Coleta dos dados: Coordenadas coletadas não representam com exatidão o percurso percorrido EXPERIMENTO 2: AMBIENTE REAL

93
Coleta dos dados: Identificando problema de descalibragem da API do Google Maps Google Maps EXPERIMENTO 2: AMBIENTE REAL

94
Bing Maps Coleta dos dados: Identificando problema de descalibragem da API do Google Maps EXPERIMENTO 2: AMBIENTE REAL Google Maps

95
Bing MapsYahoo Maps Coleta dos dados: Identificando problema de descalibragem da API do Google Maps EXPERIMENTO 2: AMBIENTE REAL

96
Origem Destino Coleta dos dados: Testes efetuados na cidade de Gaspar EXPERIMENTO 2: AMBIENTE REAL

97
Origem Destino Coleta dos dados: Testes efetuados na cidade de Gaspar EXPERIMENTO 2: AMBIENTE REAL

98
Origem Destino Coleta dos dados: Testes efetuados na cidade de Gaspar EXPERIMENTO 2: AMBIENTE REAL

99
Coleta dos dados: Testes efetuados na cidade de Gaspar EXPERIMENTO 2: AMBIENTE REAL

100
Coleta dos dados: Testes efetuados na cidade de Gaspar EXPERIMENTO 2: AMBIENTE REAL

101
É possível utilizar celulares com GPS para determinar as condições do trânsito Algoritmo de Dijkstra efetivo API de geocodificação do Google mostrou-se problemática CONCLUSÃO Características / trabalhos correlatos Schroeder (2012) Google Maps (2011) Google Maps Navigation (2011) GPS Airis (2011) Mobile Century (2008) Obtenção de rota de menor custoX-XX- Envio de informações de condições de tráfego X-X-X Visualização das condições de tráfego das vias -XXXX Malha viária construída dinamicamente X----
 Google Maps (2011) Google Maps Navigation (2011) GPS Airis (2011) Mobile Century (2008) Obtenção de rota de menor custoX-XX- Envio de informações de condições de tráfego X-X-X Visualização das condições de tráfego das vias -XXXX Malha viária construída dinamicamente X----")
102
Situação não tratada LIMITAÇÕES

103
EXTENSÕES tornar visível a situação das condições de tráfego através de um site;

104
EXTENSÕES tornar visível a situação das condições de tráfego através de um site; integrar novas APIs de geocodificação reversa, afim de não depender somente da API do Google que nos testes demonstrou problemas de calibragem na cidade de Blumenau

105
EXTENSÕES tornar visível a situação das condições de tráfego através de um site; integrar novas APIs de geocodificação reversa, afim de não depender somente da API do Google que nos testes demonstrou problemas de calibragem na cidade de Blumenau utilizar heurística para o cálculo da rota de menor custo a fim de melhorar o processamento em uma massa de dados maior

106
EXTENSÕES tornar visível a situação das condições de tráfego através de um site; integrar novas APIs de geocodificação reversa, afim de não depender somente da API do Google que nos testes demonstrou problemas de calibragem na cidade de Blumenau utilizar heurística para o cálculo da rota de menor custo a fim de melhorar o processamento em uma massa de dados maior disponibilizar uma interface para informar sobre desvios na via de tráfego ou ainda sobre possíveis interdições devido a obras;

107
EXTENSÕES tornar visível a situação das condições de tráfego através de um site; integrar novas APIs de geocodificação reversa, afim de não depender somente da API do Google que nos testes demonstrou problemas de calibragem na cidade de Blumenau utilizar heurística para o cálculo da rota de menor custo a fim de melhorar o processamento em uma massa de dados maior disponibilizar uma interface para informar sobre desvios na via de tráfego ou ainda sobre possíveis interdições devido a obras implementar a coleta de dados geográficos em outras plataformas móveis como IOS, Symbian e Windows Phone garantindo assim uma maior adesão de usuários e logo uma maior cobertura na coleta dos dados o que significa que mais ruas terão suas estatísticas de tráfego apuradas

108
DEMONSTRAÇÃO

109
OBRIGADO

Apresentações semelhantes




 / INÊS.>")













 UNIVERSIDADE REGIONAL DE BLUMENAU CURSO DE SISTEMAS DE INFORMAÇÃO.>")



