Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Melhorando o erro de estado estacionário e a resposta transitória
Controlador ideal: Proporcional, Derivativo e Integral – PID Controlador Atraso-Avanço de Fase Como o controle da resposta de transitória afeta o erro de estado estacionário, o mais adequado é primeiro adequar a resposta transitório através do controle PD ou avanço de fase e em seguida adequar o erro de estado estacionário com o controlador PI ou atraso de fase.

2
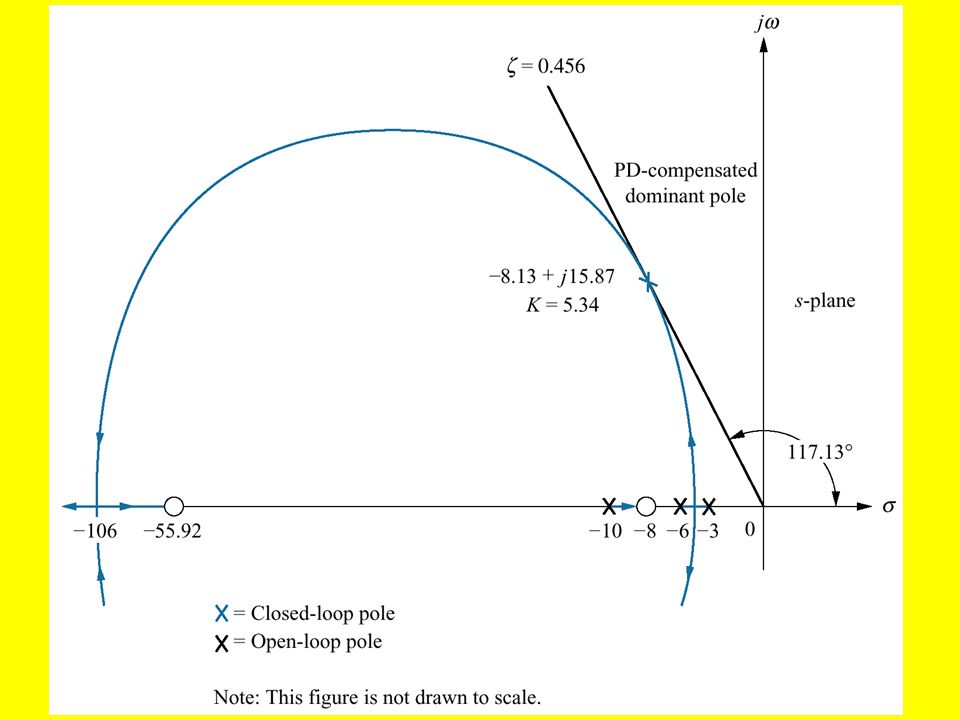
Controlador PID

3
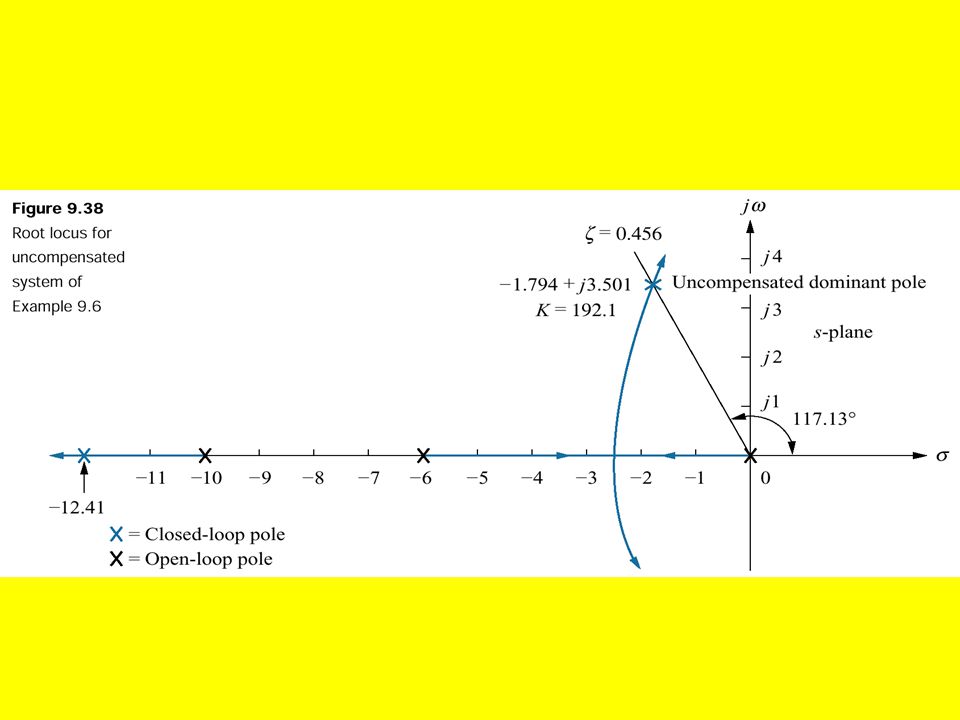
Exemplo: Projetar um controlador para que o tempo de pico seja dois terço do sistema não compensado com %UP=20% e erro de estado estacionário nulo para entrada degrau

4
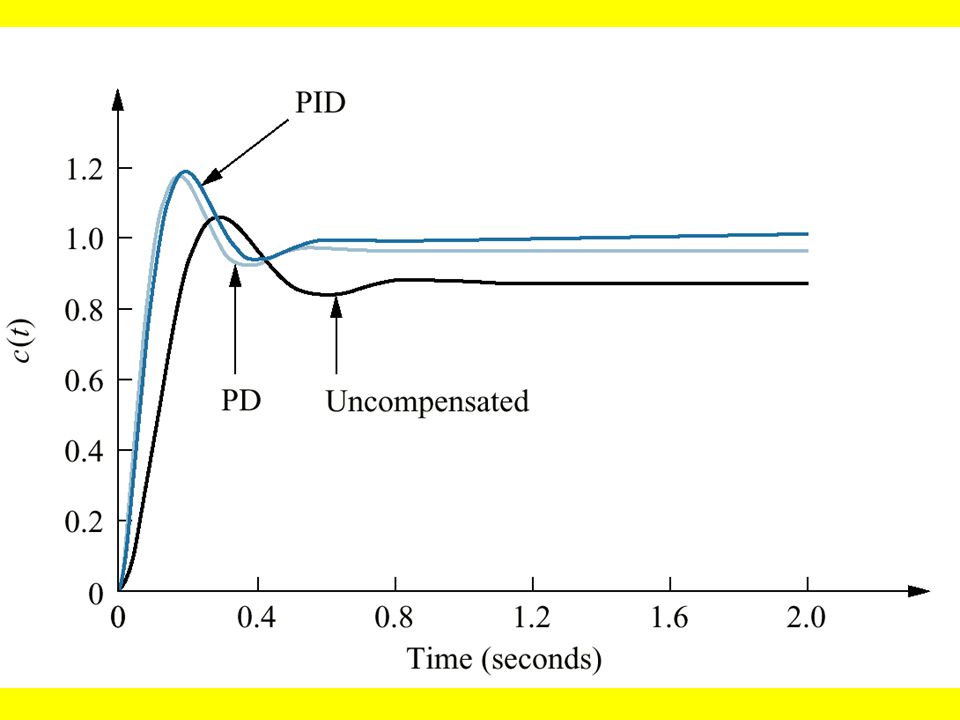
PARÂMETROS DE RESPOSTA AO DEGRAU

9
Características previstas dos sistemas não-compensado e com compensadores PD e PID

10
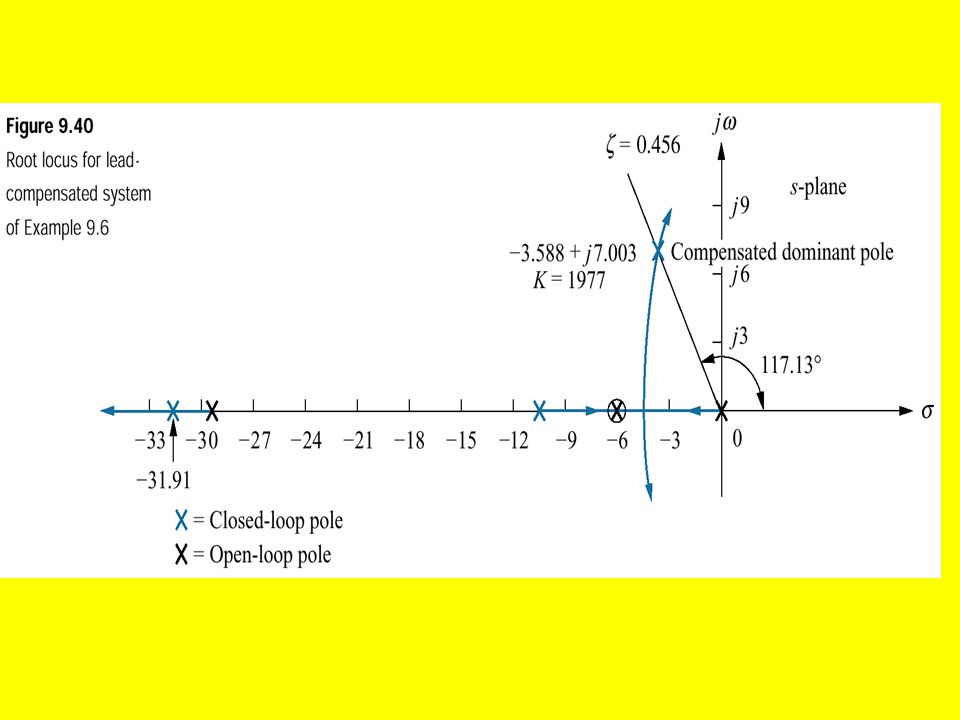
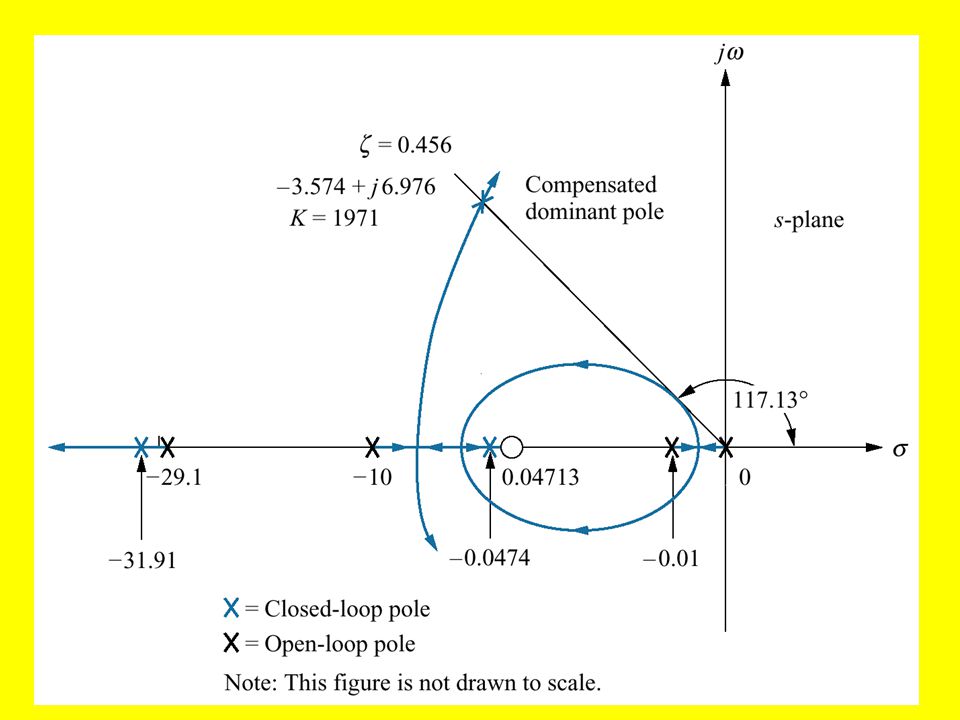
Exemplo: Projete um compensador avanço-atraso de fase para que o sistema abaixo continue operando com %UP=20% e reduza pela metade o tempo de estabilização. O erro para uma entrada rampa deve ser reduzido em 10 vezes

11
PARÂMETROS DE RESPOSTA AO DEGRAU

17
5,0 4,5 4,0 3,5 3,0 2,5 2,0 1,5 1,0 0,5

18
Exercícios Sugeridos Capítulo 9
Exemplos: 9.1, 9.2, 9.3, 9.4, 9.5, 9.6, 9.7 e 9.8; Exercícios de Avaliação: 9.1, 9.2, 9.3 e 9.4; Problemas: 1, 2, 3, 4, 5, 8, 10, 11, 13, 14, 15, 16, 18, 21, 25 e 26.

Apresentações semelhantes






 Apresentação do Curso>")
















