Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Projeto de Sistemas de Controle no Espaço de Estados
Controle Dinâmico

2
Lista de Exercícios Controlabilidade e Observabilidade Ogata 4ed B Lista de Exercícios Projeto no Espaço de Estados Ogata 4ed B.12.1, 2, 3, 5, 6, 8, 9, 11,14, 16,17,19, 20.

3
Projeto de Controladores no SS
Considere o sistema O comportamento dinâmico é caracterizado por Suponha que queremos alterar as características dinâmicas para Como escolher o sinal de controle u(t)?
")
4
Projeto de Controladores no SS
Vamos considerar realimentação de estados O sistema realimentado é Cujo polinômio característico é dado por

5
Determinação do Ganho K
Caso 1) Substituição Direta Exemplo: Para o sistema realimentado Determinar um ganho K tal que os pólos sejam -2 e -3.
 Substituição Direta. Exemplo: Para o sistema realimentado. Determinar um ganho K tal que os pólos sejam -2 e -3.")
6
Solução por substituição direta
pólos desejados em -2 e -3

7
Determinação do Ganho K
Caso 2) Sistema está na forma canônica controlável
 Sistema está na forma canônica controlável.")
8
Caso 2) Sistema está na forma canônica controlável
O sistema realimentado fica Cujo polinômio característico é dado por

9
Determinação do Ganho K
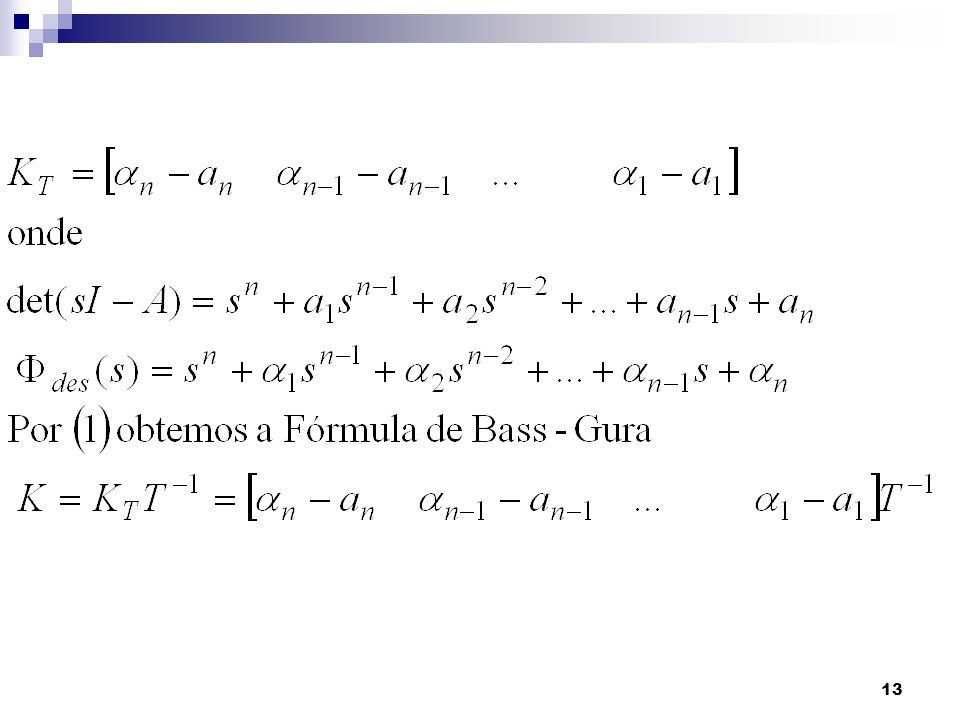
Caso 3) Sistema Não está na forma canônica controlável Teorema: Considere o sistema com Se o sistema é controlável, então existe uma transformação T tq está na forma canônica controlável
 Sistema Não está na forma canônica controlável. Teorema: Considere o sistema. com. Se o sistema é controlável, então existe uma transformação T tq. está na forma canônica controlável.")
10
está na forma canônica controlável

11
Determinação do Ganho K
Caso 3) Sistema Não está na forma canônica controlável Vamos considerar realimentação de estados O sistema realimentado é
 Sistema Não está na forma canônica controlável. Vamos considerar realimentação de estados. O sistema realimentado é.")
12
Vamos considerar realimentação de estados
Caso 3) Sistema Não está na forma canônica controlável Vamos considerar realimentação de estados O sistema realimentado é
 Sistema Não está na forma canônica controlável. Vamos considerar realimentação de estados. O sistema realimentado é.")
14
Determinação do Ganho K
Caso 4) Fórmula de Ackermann onde: = polinômio característico desejado do sistema de malha fechada
 Fórmula de Ackermann. onde: = polinômio característico desejado do sistema de malha fechada.")
15
Projeto com acompanhamento de referência e imposição de pólos
Considere o sistema controlável Desejamos acompanhar uma referência r(t) e impor o comportamento dinâmico de x(t)
 e impor o comportamento dinâmico de x(t)")
Apresentações semelhantes



![Matrizes especiais Matriz linha Matriz do tipo 1 x n, ou seja, com uma única linha. Por exemplo, a matriz A =[ ], do tipo 1 x 4. Matriz coluna.](/1/83680/big_thumb.jpg "Matrizes especiais Matriz linha Matriz do tipo 1 x n, ou seja, com uma única linha. Por exemplo, a matriz A =[ ], do tipo 1 x 4. Matriz coluna.>")















