Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Representação de sistemas de dados mostrados
Na aula anterior introduzimos o tema de sistemas discretos e recordamos aspectos sobre transformada Z, que é uma ferramenta imprescindível para trabalhar neste campo Hoje nos deteremos em dois aspectos fundamentais Representação de sistemas de dados mostrados

2
Representação Discreta do Subsistema:
D/A – Processo – A/D Na aula anterior, foi apresentado o sistema de controle digital genérico, vide figura que pode ser esquematizada na seguinte forma: Neste modelo, o relógio garante que o sistema discreto irá trabalhar com um período de amostragem constante.

3
Em geral, a referência r(t) (sinal de entrada) é gerada internamente pelo
computador, desta forma o diagrama pode ser representado como: Observações Na figura o sistema está parcialmente descrito na variável “z” e parcialmente na variável “s”. Para projetar o controlador Gz, é necessário que o sistema todo esteja representado em apenas uma única variável. Isto é feito determinando a função de transferência discreta do subsistema discreto composto por D/A – processo – A/D, ou seja:

4
A seguir nos deteremos um momento neste elemento

5
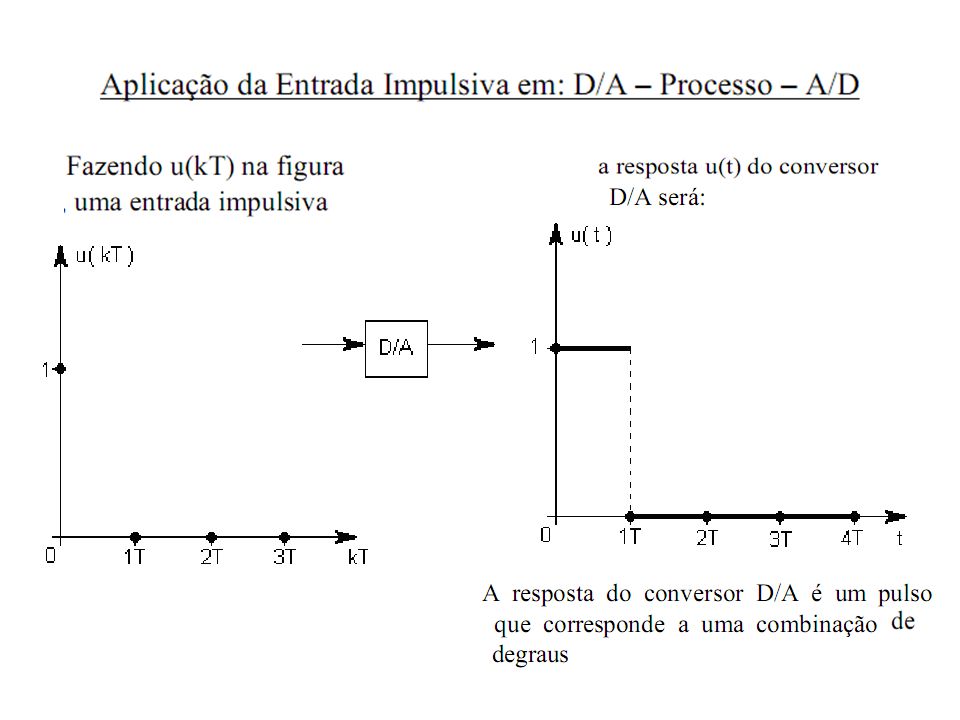
O conversor D/A de ordem zero aproxima os valores amostrados por um
polinômio de ordem zero, conforme mostrado na figura abaixo.

7
Para determinar a resposta de G(s) (processo) a essa entrada, é necessário
aplicar a transformada de Laplace sabendo que:

8
A transformada de Laplace é:

9
Segundo a figura Sendo que y(kT) é obtido de y(t) fazendo apenas t = kT. A resposta y(s) do processo devido à entrada é Esta resposta y(t) passa pelo conversor A/D e gera y(kT).
 passa. pelo conversor A/D e gera y(kT).")
10
A transformada Z de y(kT) será:
Fazendo: Teremos: Segundo o operador atraso:

11
Logo, devido a Já se definiu anteriormente Assim, deve ser interpretada como a transformada – Z da seqüência obtida pela amostragem do sinal

12
Como a resposta ao impulso Y(z) é igual à função de transferência do sistema H(z), temos:
A equação pode ser determinada utilizando apenas a tabela Logo, para calcular H(z) devem-se seguir os seguintes passos: Encontre na tabela a transformada inversa de Faça e encontre na tabela a transformada – Z de Finalmente, a função de transferência discreta do sistema D/A – G(s) – A/D será
 devem-se seguir os seguintes passos: Encontre na tabela a transformada inversa de. Faça. e encontre na tabela a transformada – Z de. Finalmente, a função de transferência discreta do sistema. D/A – G(s) – A/D. será.")
13
Exemplo 1: Considere o seguinte sistema dinâmico com interface A/D e D/A:
Calcule a função de transferência discreta: Solução: A função de transferência H(z) é obtida realizando-se os passos da página anterior: 1-
 é obtida realizando-se os passos da página anterior: 1-")
14
2- logo, segundo a tabela temos: utilizou-se a linha (6) da tabela 3- Finalmente,
 da tabela 3- Finalmente,")
15
Se a=4; G=tf(a,[1 a]); T=0.1; Gz=c2d(G,T) 0.3297 z
![Se a=4; G=tf(a,[1 a]); T=0.1; Gz=c2d(G,T) z](http://slideplayer.com.br/slide/4878626/16/images/15/Se+a%3D4%3B+G%3Dtf%28a%2C%5B1+a%5D%29%3B+T%3D0.1%3B+Gz%3Dc2d%28G%2CT%29+z.jpg "Se a=4; G=tf(a,[1 a]); T=0.1; Gz=c2d(G,T) z")
16
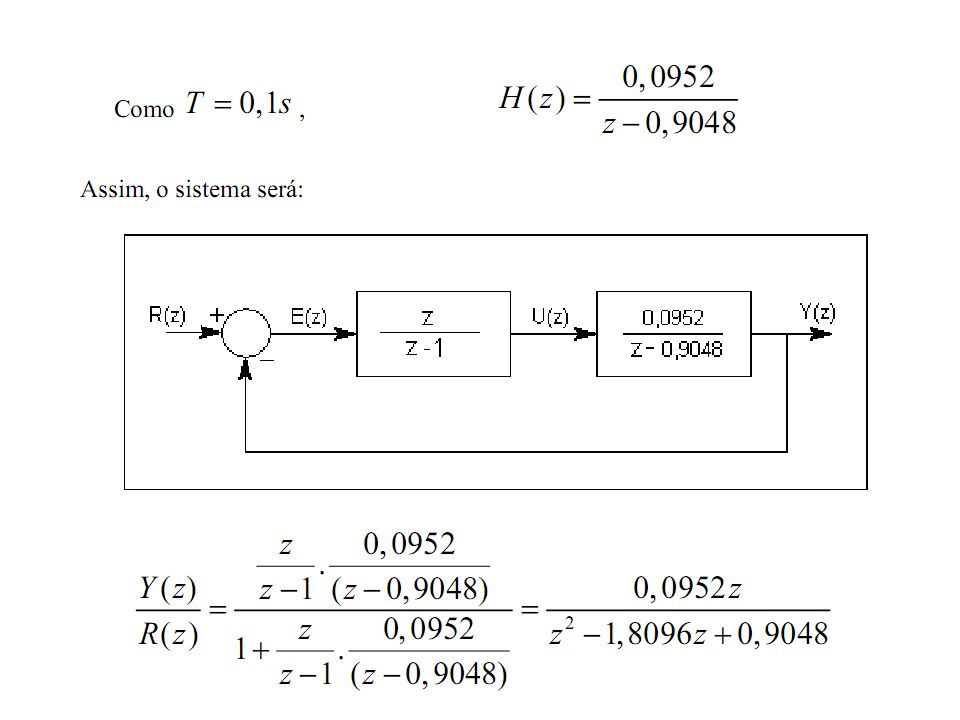
Exemplo 2: Considere o sistema de controle digital abaixo,
O período de amostragem da parte discreta é: 0,1seg Trace o gráfico de y(kT) x kT devido a entrada r(kT) tipo degrau unitário..
 x kT devido a entrada r(kT) tipo degrau unitário..")
17
Solução: Para determinar y(kT) é necessário primeiramente representar todo sistema na variável Z, onde obtemos:

20
Os pólos são: Temos:

21
Aplicando a propriedade de deslocamento:

22
Finalmente, a resposta transitoria sera:

23
Gz=tf([ ],[ ],0.1) figure(1) step(Gz) Esta é a resposta completa se quer ver quão mesmo obteve teoricamente até o instante de amostragem 17
![Gz=tf([ ],[ ],0.1) figure(1) step(Gz) Esta é a resposta completa se quer ver quão mesmo obteve teoricamente.](http://slideplayer.com.br/slide/4878626/16/images/23/Gz%3Dtf%28%5B+%5D%2C%5B+%5D%2C0.1%29+figure%281%29+step%28Gz%29+Esta+%C3%A9+a+resposta+completa+se+quer+ver+qu%C3%A3o+mesmo+obteve+teoricamente..jpg "até o instante de amostragem 17.")
24
Gz=tf([ ],[ ],0.1) figure(1) step(Gz,2)
![Gz=tf([ ],[ ],0.1) figure(1) step(Gz,2)](http://slideplayer.com.br/slide/4878626/16/images/24/Gz%3Dtf%28%5B+%5D%2C%5B+%5D%2C0.1%29+figure%281%29+step%28Gz%2C2%29.jpg "Gz=tf([ ],[ ],0.1) figure(1) step(Gz,2)")
25
n=[ ] d=[ ] figure(2) dstep(n,d)
![n=[ ] d=[ ] figure(2) dstep(n,d)](http://slideplayer.com.br/slide/4878626/16/images/25/n%3D%5B+%5D+d%3D%5B+%5D+figure%282%29+dstep%28n%2Cd%29.jpg "n=[ ] d=[ ] figure(2) dstep(n,d)")
Apresentações semelhantes

















: sincronismo de tarefas,>")
 } = F (s) = 0+ f(t) e-st dt>")

