Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Unesp – Universidade Estadual Paulista Engenharia Elétrica Alunos: Guaraci Nakamura R. C. Rafael Cuba Vitor Zaccari

2
Objetivos Familiarização do uso do circuito Integrado MC33030 da motorola. Estudo das características operacionais do MC33030

3
Circuito Integrado MC33030 Motorola
Caracteristicas: · Possui Amplificador de Erro para monitoração em malha fechada · Janela detectora com “Dead Band” e ajuste manual do centro da referência da entrada · Drive/ Freio lógico com memória de direção · Corrente máxima de 1 Ampère (na chave H) · Detetor de sobrecorrente programável · Tempo de atraso de desligamento por sobrecorrente programável · Desligamento por sobretensão
 · Detetor de sobrecorrente programável. · Tempo de atraso de desligamento por sobrecorrente programável. · Desligamento por sobretensão.")
4
Funcionamento MC33030 Diagrama de blocos

5
Detalhando o funcionamento de cada parte do dispositivo:
Error Amp - Amplificador de Erro para monitoração em malha fechada Pode funcionar como Buffer ou como amplificador de nível de tensão Esse sinal é jogado para o Window detector.

6
Detalhando o funcionamento de cada parte do dispositivo:
Window detector - Janela detectora com “Dead Band” e ajuste manual do centro da referência da entrada. Nesta parte do circuito, o nível de entrada de tensão (que vem do Amp erro) é comparado com uma tensão de referência. Neste ponto é que ocorre a banda morta ou “Dead Band”, onde o motor é freado por ação do freio lógico do circuito, indicando que o mesmo já chegou ao ponto desejado de trajeto no servo posicionamento. A entrada do circuito pode se dar através do pino 3 ou da saída do Amplificador de Erro.
 é comparado com uma tensão de referência. Neste ponto é que ocorre a banda morta ou Dead Band , onde o motor é freado por ação do freio lógico do circuito, indicando que o mesmo já chegou ao ponto desejado de trajeto no servo posicionamento. A entrada do circuito pode se dar através do pino 3 ou da saída do Amplificador de Erro.")
7
Drive Brake Logic – Drive / Freio lógico com memória de direção
Detalhando o funcionamento de cada parte do dispositivo: Drive Brake Logic – Drive / Freio lógico com memória de direção As duas entradas a esquerda são as saídas A e B do circuito comparador (window detector) A em nível lógico alto gira num sentido. B em nível lógico alto gira em outro sentido. A e B estiverem em nível baixo motor será freado logicamente. Flip-Flop serve para não permitir que a chave H seja acionada nos dois sentidos, provocando um curto-circuito na fonte. É nesta parte do circuito que ocorre o bloqueio da chave H em caso sobrecorrente ou sobretensão.
 A em nível lógico alto gira num sentido. B em nível lógico alto gira em outro sentido. A e B estiverem em nível baixo motor será freado logicamente. Flip-Flop serve para não permitir que a chave H seja acionada nos dois sentidos, provocando um curto-circuito na fonte. É nesta parte do circuito que ocorre o bloqueio da chave H em caso sobrecorrente ou sobretensão.")
8
Detalhando o funcionamento de cada parte do dispositivo:
Power H Switch - Parte vital do CI, pois é na chave H que passa toda a corrente que alimenta o Motor Chave H é responsável pelo acionamento e freamento lógico direto do motor. O motor parte com a tensão e a corrente fornecida pela fonte do circuito, até o limite de 1 Ampère. Para ilustrar o funcionamento do circuito da ponte em H, vamos supor primeiramente que a saída B do comparador está em nível lógico alto e também que o circuito esteja operando dentro dos seus limites, ou seja, sem sobretensão ou sobrecorrente. O funcionamento do circuito quando a saída A do comparador é acionada é semelhante ao descrito acima, dada a simetria do circuito. 3 4 6 2 7 1 5

9
Detalhando o funcionamento de cada parte do dispositivo:
Over Current Detector (Detector de sobrecorrente programável) : Tempo de atraso de desligamento por sobrecorrente programável Se a corrente da chave-H for maior que a corrente de referência o comparador irá cortar o transistor, iniciando o carregamento do capacitor de atraso ( CDLY). Quando a tensão do capacitor chegar a tensão de referência, irá disparar o comparador de tensão, que por sua vez irá “setar” o Flip-Flop, desligando o motor através do controle no circuito “Drive Brake Logic”.
 : Tempo de atraso de desligamento por sobrecorrente programável. Se a corrente da chave-H for maior que a corrente de referência o comparador irá cortar o transistor, iniciando o carregamento do capacitor de atraso ( CDLY). Quando a tensão do capacitor chegar a tensão de referência, irá disparar o comparador de tensão, que por sua vez irá setar o Flip-Flop, desligando o motor através do controle no circuito Drive Brake Logic .")
10
Detalhando o funcionamento de cada parte do dispositivo:
Over Current Detector (Detector de sobrecorrente programável) O controle de desligamento por sobrecorrente é dado a partir do dimensionamento do resistor Roc, dado pelo gráfico:
 O controle de desligamento por sobrecorrente é dado a partir do dimensionamento do resistor Roc, dado pelo gráfico:")
11
Detalhando o funcionamento de cada parte do dispositivo:
Over-Voltage Monitor Se a tensão de operação do circuito ultrapassar 18 Volts, o motor é desligado e o CI só volta a funcionar caso a tensão de operação fique abaixo de 17.5 volts. Isto é possível devido a histerese do comparador. É possível notar que a tensão de operação vai de 8,0 a 17,5 V.

12
Circuito Interno do MC33030

13
MC33030 Valores Máximos:

14
MC33030

15
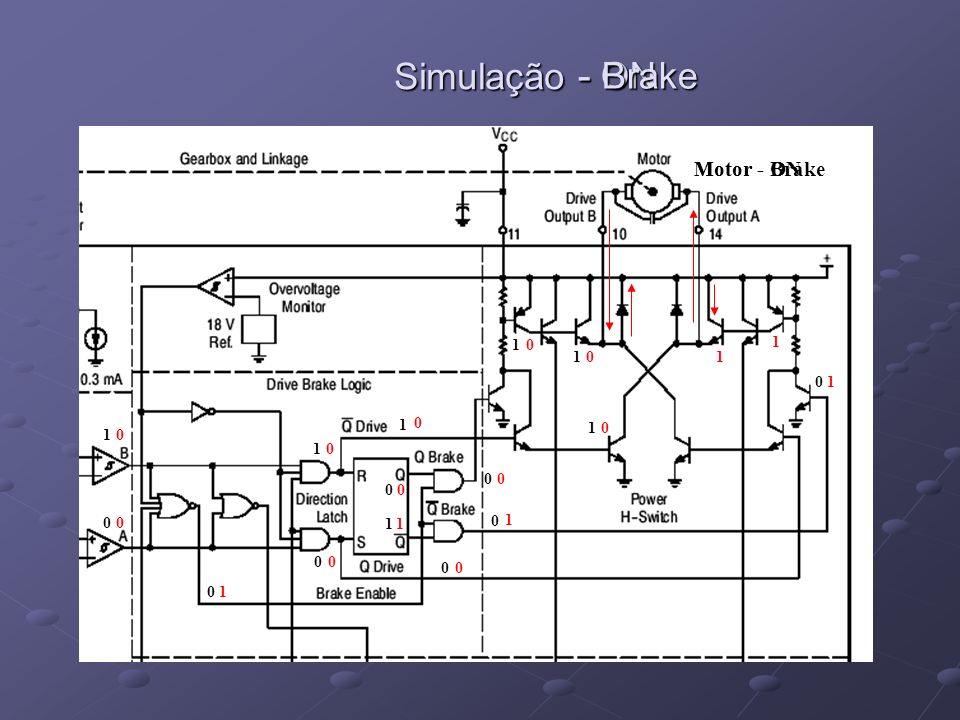
Simulação - ON - Brake Motor - ON Motor - Brake 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1
16
Diagrama de Tempo

17
Aplicações do MC33030 No Data Sheet podem ser encontrados vários circuitos de aplicação deste circuito integrado, dos quais podemos citar: Sistema de servo posicionamento: “tracking” solar Servo sistema por sensoreamento magnético Servo sistema por sensoreamento de temperatura Entre outros

18
Comparação entre Servo Motor e Motor de Passo
Os 2 tipos de motores são utilzados em processos industriais que exigem alta precisão de posicionamento e atendem igualmente as mais diversas aplicações na área de automoção A comparação foi feita com base no erro de estado estacionário, ultrapassagem (%UP) e erro de posicionamento
 e erro de posicionamento.")
19
Comparação entre Servo Motor e Motor de Passo
O servo motor DC desenvolveu uma velocidade mais estável, além de não apresentar ultrapassagem de sinal nos instantes de aceleração e desaceleração Logo, Motor DC é uma alternativa melhor pois processos industriais exigem, além da precisão no posicionamento, um controle bem desenvolvido de torque e velocidade

20
Conclusão Análise do circuito abordou diversos conceitos de eletrônica industrial Motor DC é mais indicado para aplicações industrias, ao invés de motor de passo

Apresentações semelhantes



















