Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Aproximação de funções
Pontos mais importantes: -objectivo de aproximação de funções -Interpolação: -interpolação polinomial -polinómio interpolador de Newton -polinómio interpolador de Lagrange -”splines” [-regressão: -regressão linear -coeficiente de regressão -regressão não linear] 1

2
Motivação -dados são frequentemente disponíveis como um conjunto discreto de pontos (experiências, tabelas) ----> pretendem-se estimar valores entre os pontos -pretende-se uma forma simplificada de uma função complicada -----> calculam-se os valores da função só para alguns pontos discretos no intervalo de interesse e usar uma função mais simples (e.g. linear) para estimar os outros valores (tabelas, gráficos de engenharia) 2
 ----> pretendem-se estimar valores entre os pontos. -pretende-se uma forma simplificada de uma função complicada -----> calculam-se os valores da função só para alguns pontos discretos no intervalo de interesse e usar uma função mais simples (e.g. linear) para estimar os outros valores (tabelas, gráficos de engenharia) 2.")
3
Métodos de aproximação de funções
-pontos muito precisos (erros associados são desprezáveis) > a função de aproximação deve passar por cada um dos pontos----> interpolação -pontos afectado por um erro apreciável----->o que têm importância é a tendência geral dos dados por isso a função não precisa de passar necessariamente por todos os pontos-----> regressão interpolação regressão 3
 ----> a função de aproximação deve passar por cada um dos pontos----> interpolação. -pontos afectado por um erro apreciável----->o que têm importância é a tendência geral dos dados por isso a função não precisa de passar necessariamente por todos os pontos-----> regressão. interpolação. regressão. 3.")
4
Interpolação polinomial
-em princípio podemos usar qualquer função como função interpoladora -polinómios são excelentes candidatos, porque dados n+1 pontos, há apenas um e só um polinómio de grau n, ou inferior, que passa em todos os pontos: -2 pontos----> n=1 (recta) -3 pontos----> n=2 (parábola) -a interpolação consiste em determinar os parâmetros do polinómio de grau n a partir de n+1 pontos dados ({x1;y1}, {x2;y2},…, {xn+1;yn+1}) sabendo que p(xi)= yi -forma geral dos polinómios: 4
 -3 pontos----> n=2 (parábola) -a interpolação consiste em determinar os parâmetros do polinómio de grau n a partir de n+1 pontos dados ({x1;y1}, {x2;y2},…, {xn+1;yn+1}) sabendo que p(xi)= yi. -forma geral dos polinómios: 4.")
5
Interpolação polinomial
-aplicando os pontos conhecidos {xi;yi} resulta um sistema linear com n+1 incógnitas -a matriz de coeficientes é tanto mais mal condicionada tanto maior for n -embora o polinómio p(x) seja único, ele pode ser expresso de variadas maneiras: -polinómio de Newton -polinómio de Lagrange 5
 seja único, ele pode ser expresso de variadas maneiras: -polinómio de Newton. -polinómio de Lagrange. 5.")
6
Polinómio interpolador de Newton (diferenças divididas finitas)
Interpolação linear (n=1): 2 pontos {x1;y1}, {x2;y2} aprox. da primeira derivada 6
: 2 pontos {x1;y1}, {x2;y2} aprox. da primeira derivada. 6.")
7
Polinómio interpolador de Newton (diferenças divididas finitas)
Interpolação quadrática (n=2): 3 pontos {x1;y1}, {x2;y2}, {x3;y3} -procuramos o interpolador na forma: -aplicando as condições conhecidos, os parâmetros de polinómio podem ser determinadas: 7
: 3 pontos {x1;y1}, {x2;y2}, {x3;y3} -procuramos o interpolador na forma: -aplicando as condições conhecidos, os parâmetros de polinómio podem ser determinadas: 7.")
8
Polinómio interpolador de Newton (diferenças divididas finitas)
Interpolação de grau n (forma geral): n+1 pontos {x0;y0}, {x1;y1},... {xn;yn} -procuramos o interpolador na forma: onde -a função f[ ] é chamada diferenças divididas de ordem n 8
: n+1 pontos {x0;y0}, {x1;y1},... {xn;yn} -procuramos o interpolador na forma: onde. -a função f[ ] é chamada diferenças divididas de ordem n. 8.")
9
Polinómio interpolador de Newton (diferenças divididas finitas)
-ordem 0: f[ xi]=f(xi) -ordem 1: -ordem 2: -ordem n: -polinómio de interpolador geral de Newton: 9
 -ordem 1: -ordem 2: -ordem n: -polinómio de interpolador geral de Newton: 9.")
10
Polinómio interpolador de Newton (diferenças dividida finita)
ordem 1ª 2ª 3ª Tabela de diferenças divididas -não é necessário que os pontos estejam igualmente espaçados -não é necessário que as abcissas estejam ordenadas por ordem crescente 10

11
Exemplo: ordem x y 1ª 2ª 3ª 1 -1 1.1 1.51 1.3 2.56 1.4 -3.1 11

12
Erro de interpolador de Newton
-o erro da interpolação é uma função definida por en(x)=f(x)-pn(x) -a formula do interpolador é semelhante à do desenvolvimento de uma função em série de Taylor -as diferenças divididas são aproximações das derivadas de ordem superior -o erro associado à aproximação de Taylor: -para o interpolador numa forma análoga: com xi<x<xi+1 12
=f(x)-pn(x) -a formula do interpolador é semelhante à do desenvolvimento de uma função em série de Taylor. -as diferenças divididas são aproximações das derivadas de ordem superior. -o erro associado à aproximação de Taylor: -para o interpolador numa forma análoga: com xi<x<xi")
13
Erro de interpolador de Newton
-a função f(x) é geralmente incógnita, mas se mais um ponto (n+1) é disponível,o erro pode ser aproximado: 13
 é geralmente incógnita, mas se mais um ponto (n+1) é disponível,o erro pode ser aproximado: 13.")
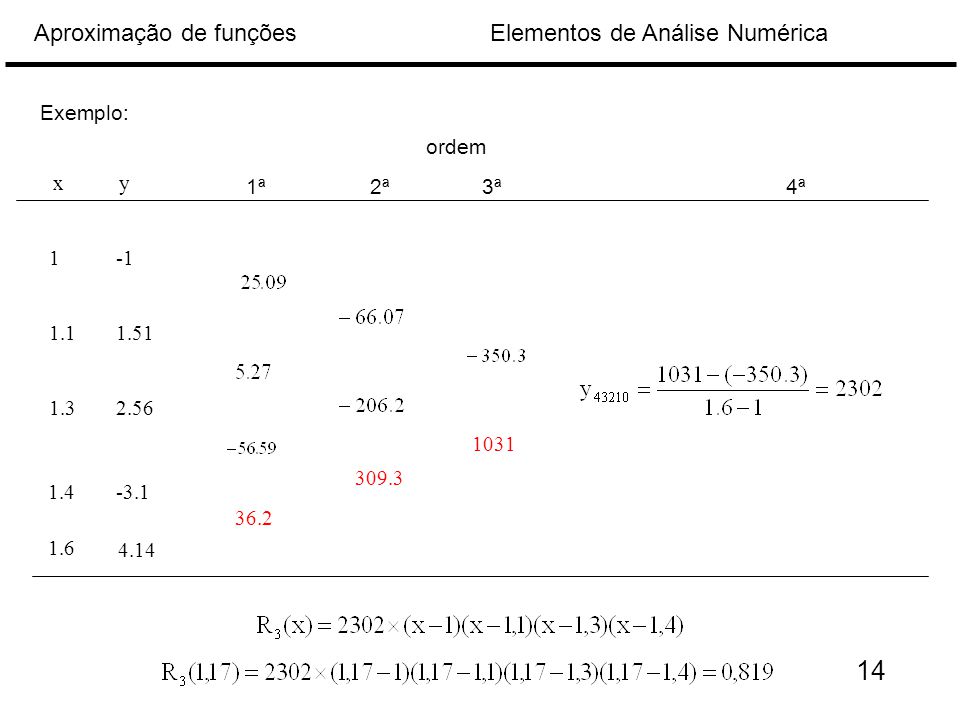
14
14 Exemplo: ordem x y 1ª 2ª 3ª 4ª 1 -1 1.1 1.51 1.3 2.56 1031 309.3
1.4 -3.1 36.2 1.6 4.14 14
15
Obtenção do polinómio interpolador pelo método de Lagrange
-o método de Lagrange é uma reformulação do interpolador Newtoniano, mas evita o cálculo das diferenças divididas finitas -expressão geral: onde -n=1 -n=2 -o erro de aproximação é obtido de forma semelhante do que no caso do método Newtoniano 15

16
Exemplo: x f(x) 1 7 2 6 16
")
17
Interpolação com nós equidistantes
-designando por h a distância entre nós sucessivos, podemos escrever que: -diferenças divididas : 17

18
Interpolação com nós equidistantes
-o símbolo Dn representa o operador de diferenças progressivas: -o resultado pode ser substituído no interpolador Newtoniano: 18

19
Interpolação com nós equidistantes
-aplicando o facto de qualquer ponto no intervalo [xo,xn] pode ser representado pela seguinte formula: x=x0+ah -o interpolador pode ser simplificado: -o erro é dado por: -extrapolação: estimativa do valor de f(x) fora da gama de valores dos pontos conhecidos (perigoso) 19
 fora da gama de valores dos pontos conhecidos (perigoso) 19.")
20
Exemplo: ordem x y f 2f 3f 10 -1 20 1.51 30 2.56 40 -3.1 X=23 ; =1,3

21
“Splines” (interpolação por segmentos polinomiais)
-às vezes um polinómio interpolador de grau n pode resultar em grandes erros (exemplo: uma função geralmente suave mas com algumas variações bruscas) -solução: splines, aplicando polinómios de grau inferior de n (para n+1 pontos) a subconjuntos de pontos Splines lineares (m=1): onde 21
 -solução: splines, aplicando polinómios de grau inferior de n (para n+1 pontos) a subconjuntos de pontos. Splines lineares (m=1): onde. 21.")
22
“Splines” (interpolação por segmentos polinomiais)
Splines quadráticas (m=2): as derivadas de primeira ordem contínuas nos nós (iguais) -para cada intervalo entre os pontos, o aproximador é um polinómio de grau 2: -n intervalos ---> 3n incógnitas -----> precisamos 3n equações -estas equações são: 2n-2 equações 2 equações n-1 equações 1 equação 22
: as derivadas de primeira ordem contínuas nos nós (iguais) -para cada intervalo entre os pontos, o aproximador é um polinómio de grau 2: -n intervalos ---> 3n incógnitas -----> precisamos 3n equações. -estas equações são: 2n-2 equações. 2 equações. n-1 equações. 1 equação. 22.")
23
“Splines” (interpolação por segmentos polinomiais)
Splines cúbicas (m=3): as derivadas de primeira e segunda ordem contínuas nos nós (iguais) -para cada intervalo entre os pontos, o aproximador é um polinómio de grau 3: -n intervalos ---n> 4n incógnitas -----> precisamos 4n equações (condições): -valores da função iguais nos nós interiores (2n-2) -a primeira e última funções devem passar pelos pontos extremos respectivos (2) -o valor das primeiras derivadas nos pontos interiores deve ser igual (n-1) -o valor de segundas derivadas nos pontos interiores deve ser igual (n-1) - o valor de segundas derivadas nos pontos extremos é 0 (2) 23
: as derivadas de primeira e segunda ordem contínuas nos nós (iguais) -para cada intervalo entre os pontos, o aproximador é um polinómio de grau 3: -n intervalos ---n> 4n incógnitas -----> precisamos 4n equações (condições): -valores da função iguais nos nós interiores (2n-2) -a primeira e última funções devem passar pelos pontos extremos. respectivos (2) -o valor das primeiras derivadas nos pontos interiores deve ser igual (n-1) -o valor de segundas derivadas nos pontos interiores deve ser igual (n-1) - o valor de segundas derivadas nos pontos extremos é 0 (2) 23.")
24
“Splines” (interpolação por segmentos polinomiais)
-as condições anteriores resultam num sistema de eq. com 4n incógnitas -um método alternativo resulta só num sistema tridiagonal apenas com n-1 incógnitas -a segunda derivada em cada intervalo é uma recta---->pode ser representada com um interpolador de Largrange de 1º grau: -a expressão anterior pode ser integrada duas vezes, e o resultado é uma função polinomial de grau 3 com duas constantes de integração -aplicando as condições para os valores extremos no intervalo i (f(xi) e f(xi-1)), os constantes de integração podem ser determinadas 24
 e f(xi-1)), os constantes de integração podem ser determinadas. 24.")
25
“Splines” (interpolação por segmentos polinomiais)
-o resultado: -a expressão para cada intervalo (i=1,2,...,n) só tem duas incógnitas (f´´) em vez de 4 25
 só tem duas incógnitas (f´´) em vez de")
26
“Splines” (interpolação por segmentos polinomiais)
-aplicando a condição que: e derivando a fórmula anterior: -o resultado é um sistema com n-1 equações e n+1 incógnitas -mas considerando que as segundas derivadas são zero nos pontos 1 e n, o sistema (tridiagonal) só envolve n-1 incógnitas---->pode ser resolvido para as segundas derivadas nos nós 26
 só envolve n-1 incógnitas---->pode ser resolvido para as segundas derivadas nos nós. 26.")
27
Exemplo: 27

28
28

Apresentações semelhantes



















:>")