Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Carlos André Vaz Junior

2
fsolve FSOLVE solves systems of nonlinear equations of several variables.

3
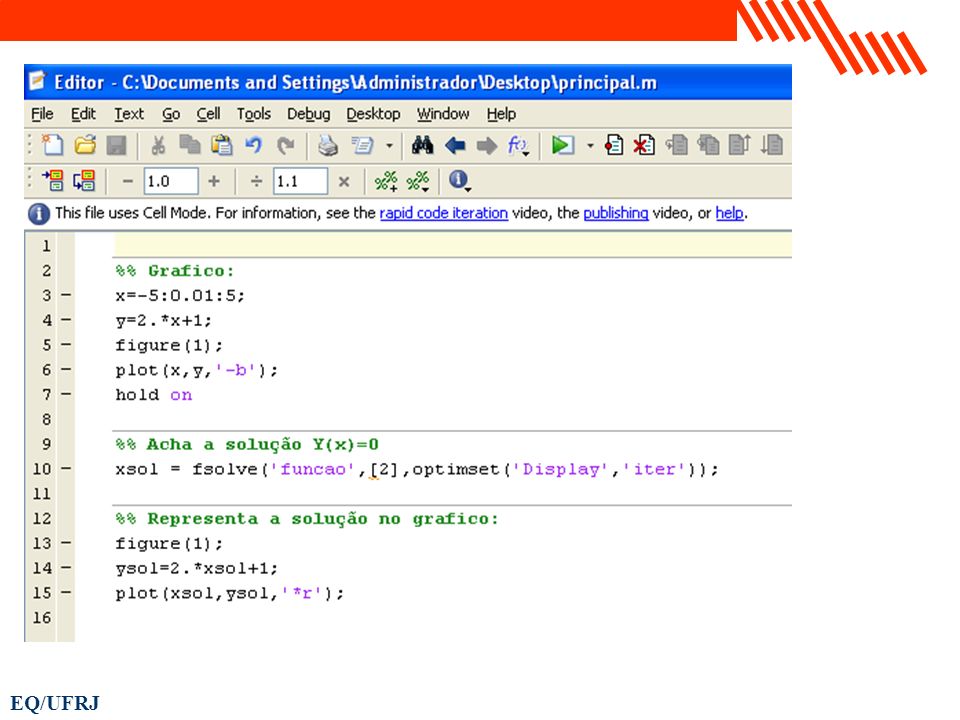
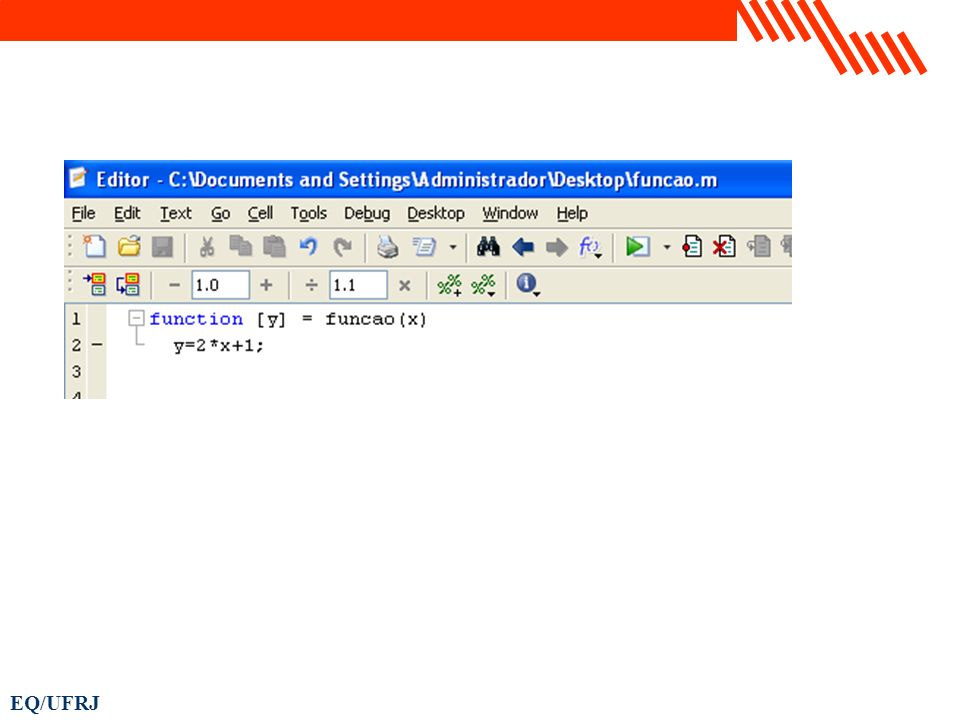
principal.m solucao = fsolve('funcao',[2],optimset('Display','iter')) function [y] = funcao(x) y=2*x+1;
![principal.m solucao = fsolve( funcao ,[2],optimset( Display , iter )) function [y] = funcao(x) y=2*x+1;](http://slideplayer.com.br/slide/44368/1/images/3/principal.m+solucao+%3D+fsolve%28+funcao+%2C%5B2%5D%2Coptimset%28+Display+%2C+iter+%29%29+function+%5By%5D+%3D+funcao%28x%29+y%3D2%2Ax%2B1%3B.jpg "principal.m solucao = fsolve( funcao ,[2],optimset( Display , iter )) function [y] = funcao(x) y=2*x+1;")
6
>> principal Norm of First-order Trust-region Iteration Func-count f(x) step optimality radius Optimization terminated: first-order optimality is less than options.TolFun.

7
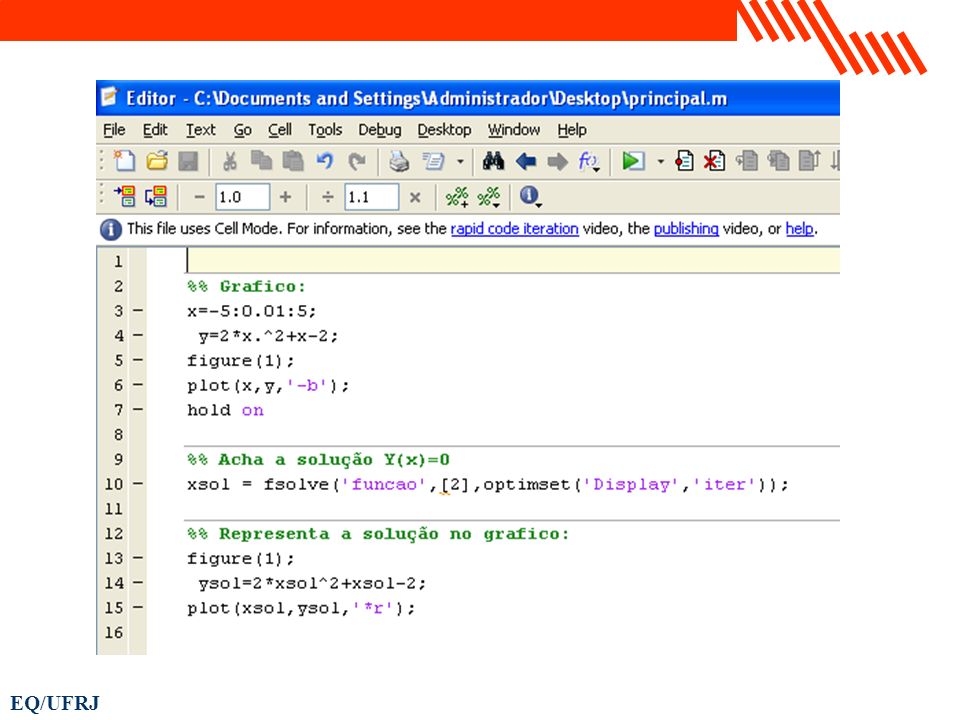
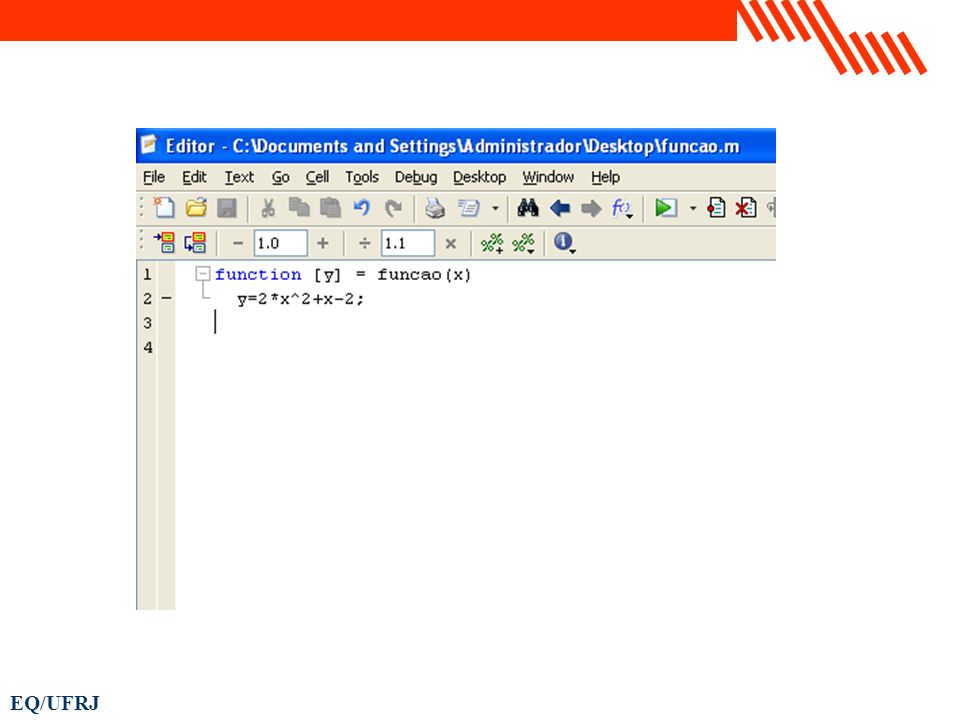
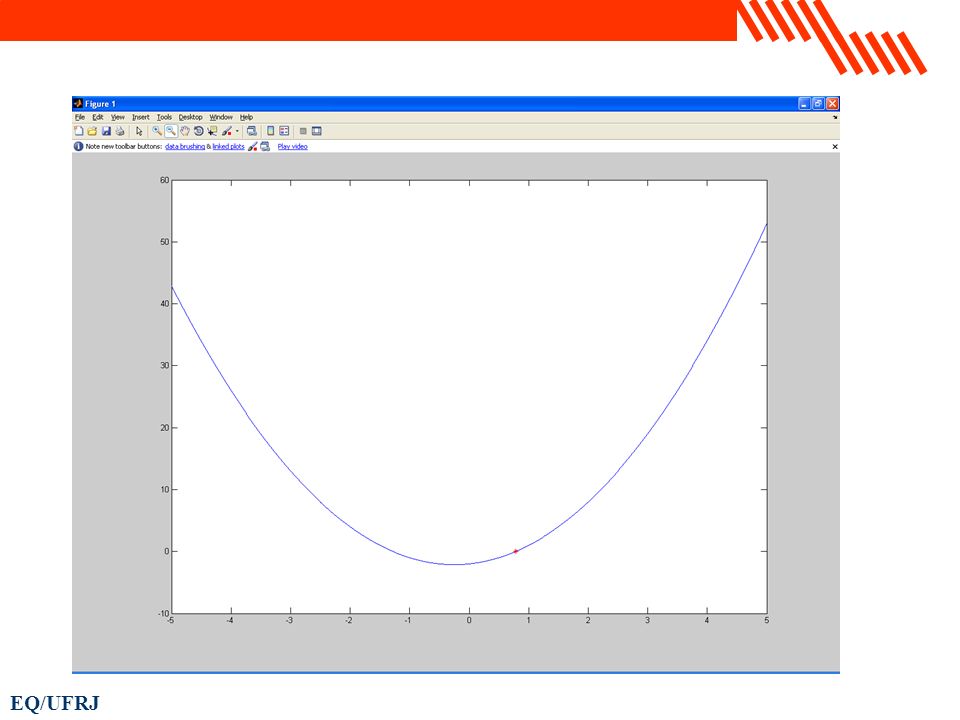
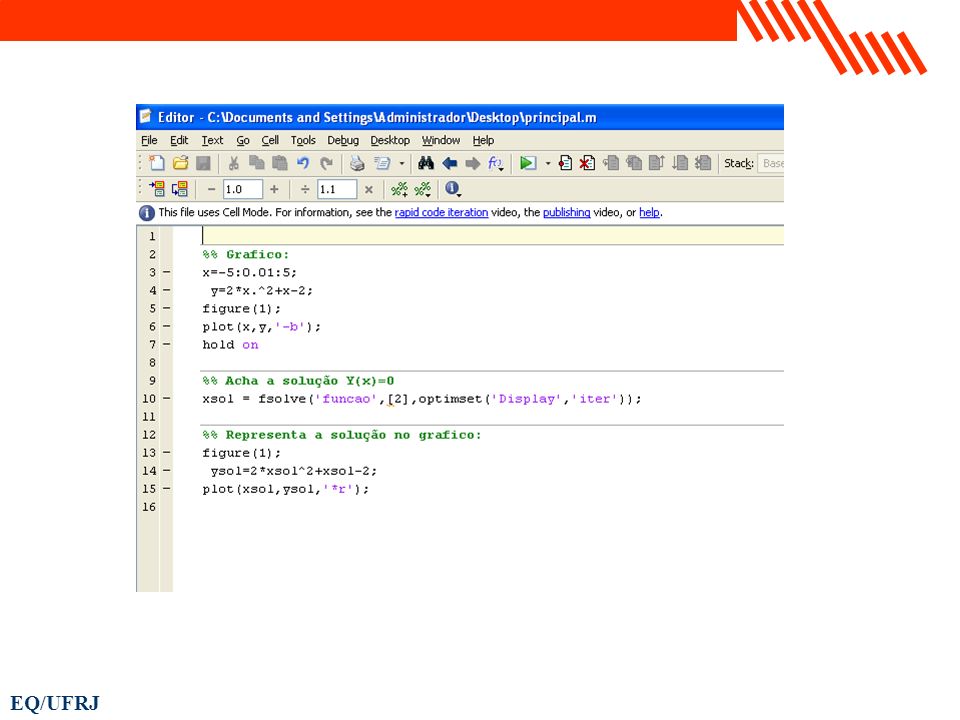
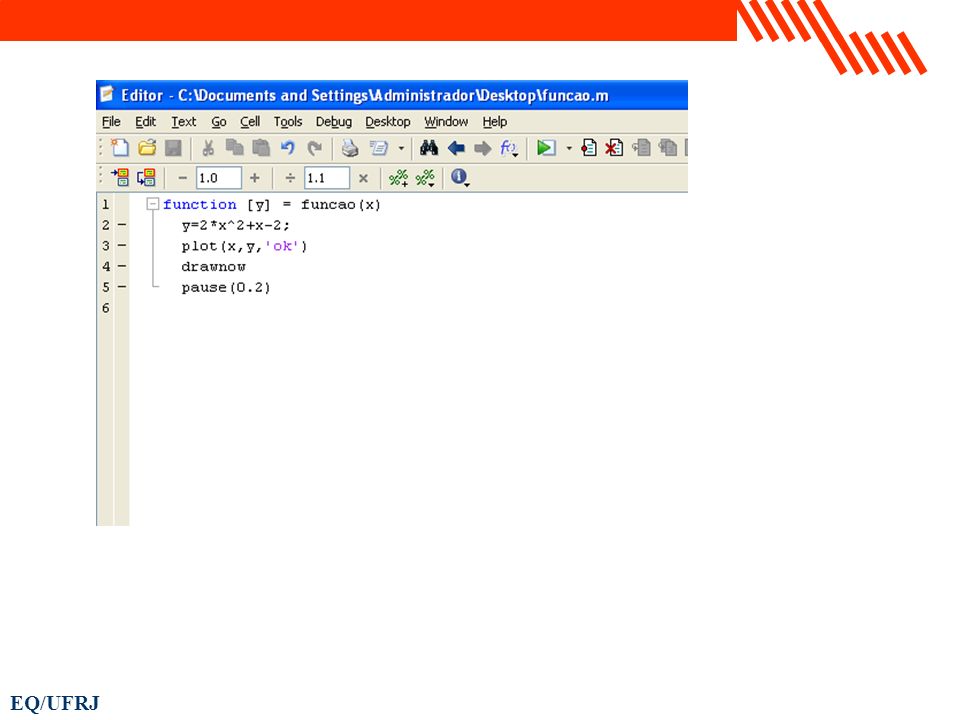
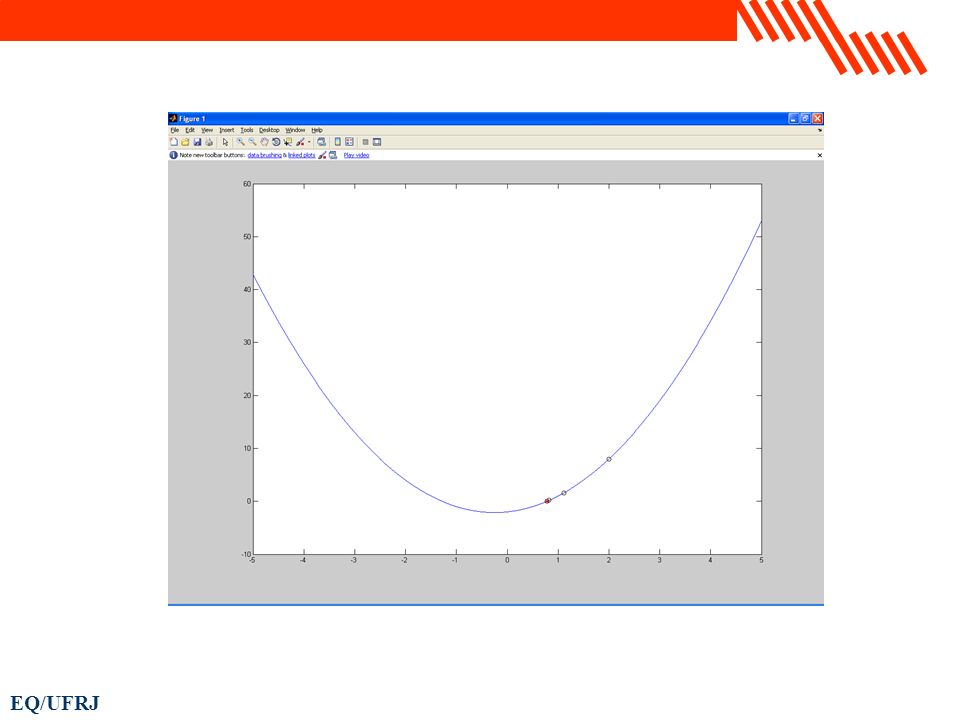
principal.m solucao = fsolve('funcao',[2],optimset('Display','iter')) function [y] = funcao(x) y=2*x^2+x-2;
![principal.m solucao = fsolve( funcao ,[2],optimset( Display , iter )) function [y] = funcao(x) y=2*x^2+x-2;](http://slideplayer.com.br/slide/44368/1/images/7/principal.m+solucao+%3D+fsolve%28+funcao+%2C%5B2%5D%2Coptimset%28+Display+%2C+iter+%29%29+function+%5By%5D+%3D+funcao%28x%29+y%3D2%2Ax%5E2%2Bx-2%3B.jpg "principal.m solucao = fsolve( funcao ,[2],optimset( Display , iter )) function [y] = funcao(x) y=2*x^2+x-2;")
14
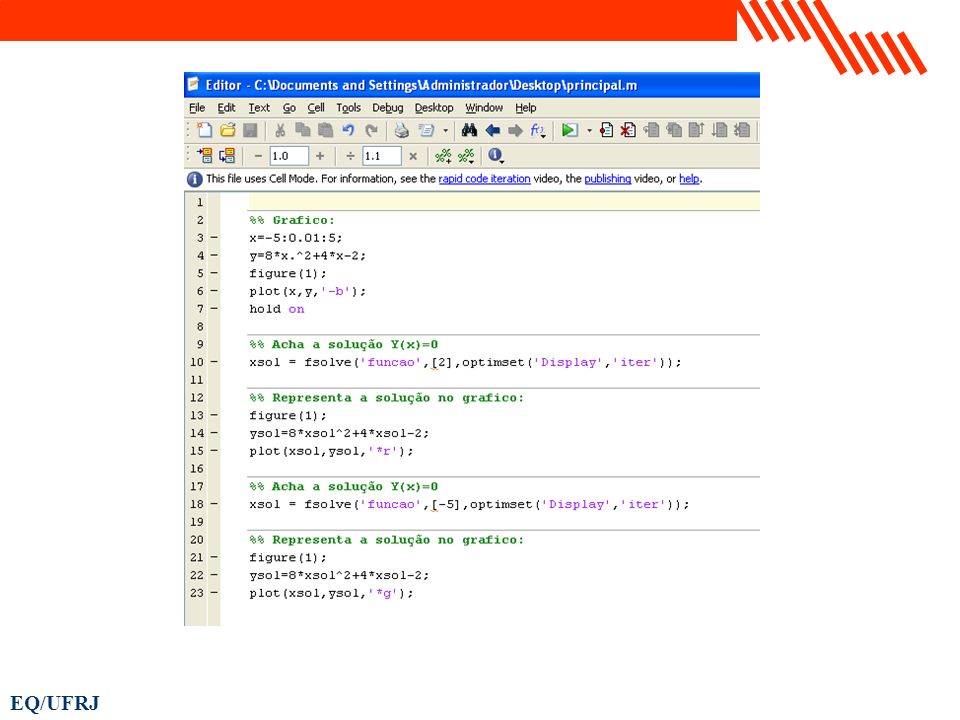
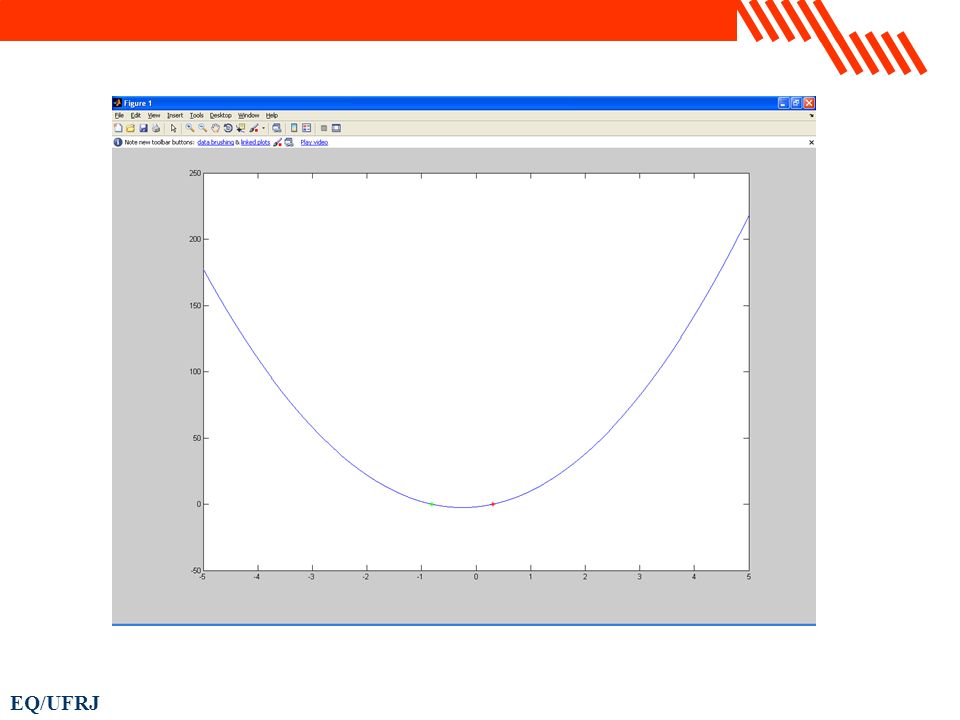
solucao = fsolve('funcao',[-1],optimset('Display','iter'))
function [y] = funcao(x) y=8*x^2+4*x-2; Experimente outro chute inicial: solucao = fsolve('funcao',[2],optimset('Display','iter')) solucao = fsolve('funcao',[-5],optimset('Display','iter'))
![solucao = fsolve( funcao ,[-1],optimset( Display , iter ))](http://slideplayer.com.br/slide/44368/1/images/14/solucao+%3D+fsolve%28+funcao+%2C%5B-1%5D%2Coptimset%28+Display+%2C+iter+%29%29.jpg "function [y] = funcao(x) y=8*x^2+4*x-2; Experimente outro chute inicial: solucao = fsolve( funcao ,[2],optimset( Display , iter )) solucao = fsolve( funcao ,[-5],optimset( Display , iter ))")
17
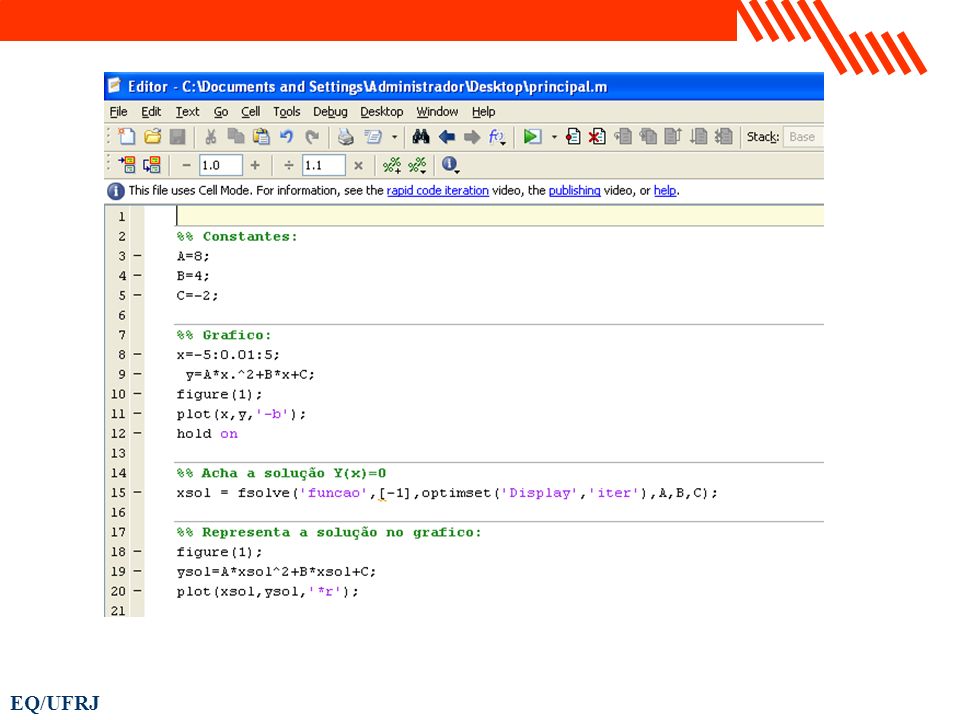
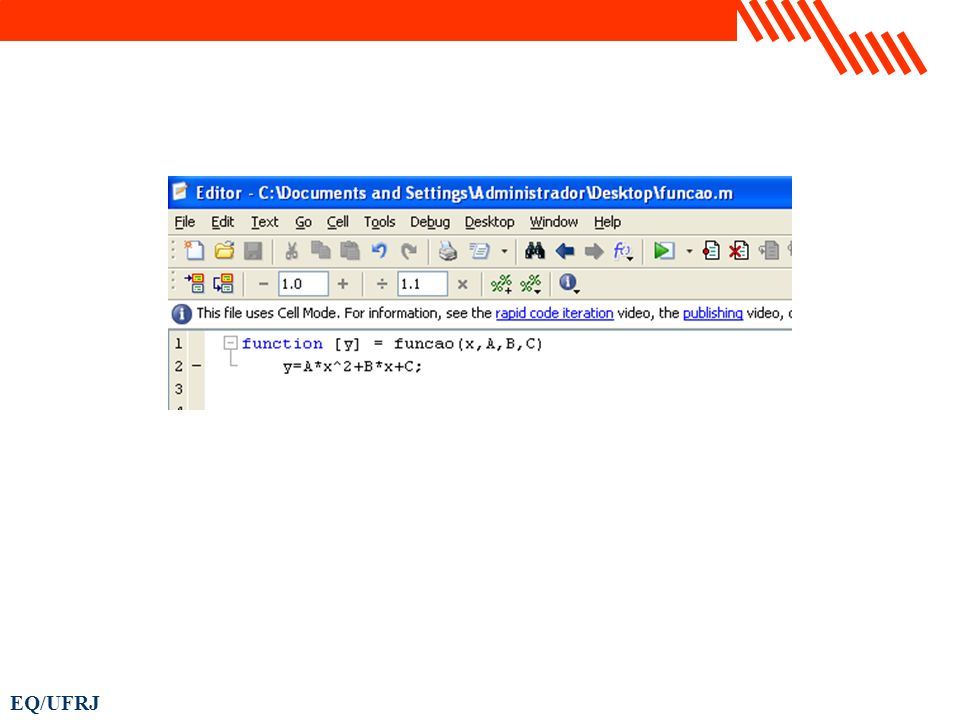
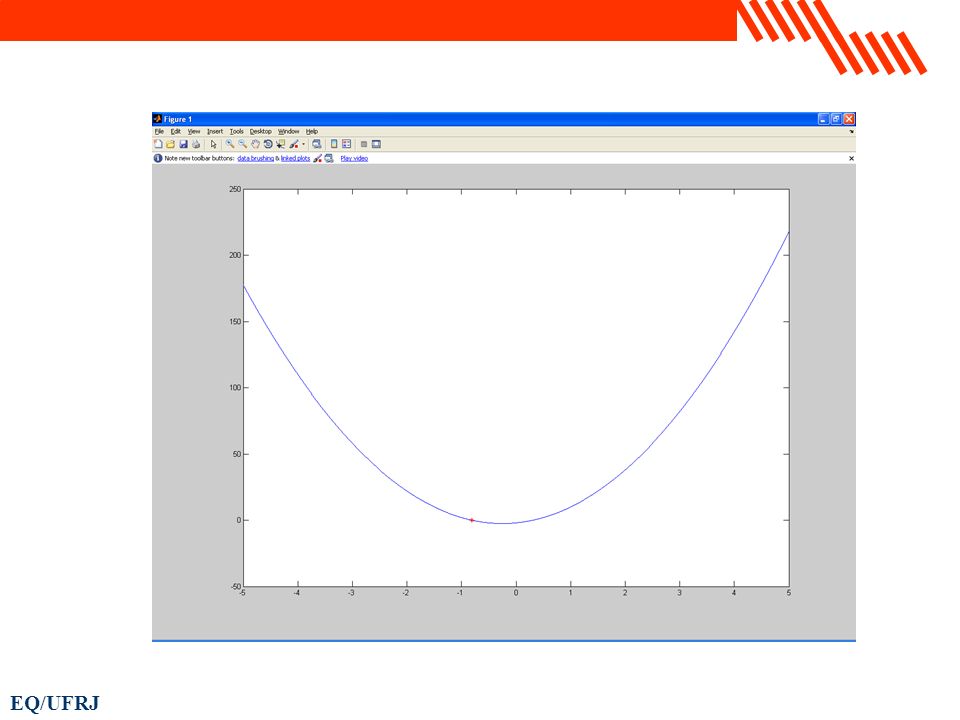
A= 8; B= 4; C= -2; solucao = fsolve('funcao',[-1],optimset('Display','iter'),A,B,C) function [y] = funcao(x,A,B,C) y=A*x^2+B*x+C;
![A= 8; B= 4; C= -2; solucao = fsolve( funcao ,[-1],optimset( Display , iter ),A,B,C) function [y] = funcao(x,A,B,C)](http://slideplayer.com.br/slide/44368/1/images/17/A%3D+8%3B+B%3D+4%3B+C%3D+-2%3B+solucao+%3D+fsolve%28+funcao+%2C%5B-1%5D%2Coptimset%28+Display+%2C+iter+%29%2CA%2CB%2CC%29+function+%5By%5D+%3D+funcao%28x%2CA%2CB%2CC%29.jpg "y=A*x^2+B*x+C;")
21
Achando todas as raízes do polinômio:
A=roots([8 4 -2])
")
22
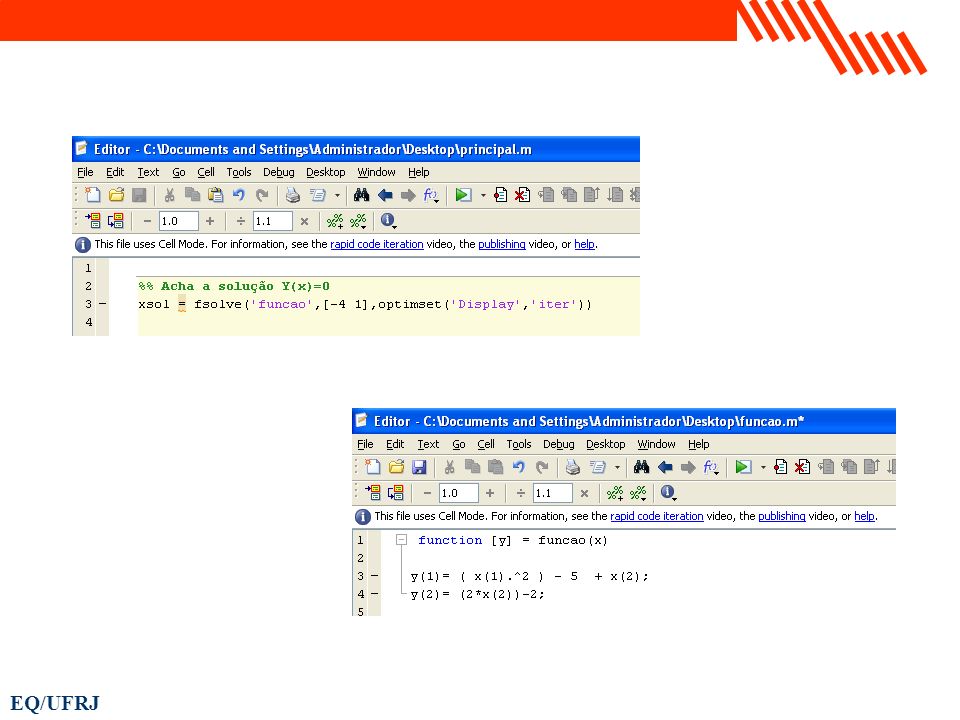
solucao = fsolve('funcao',[-4 1],optimset('Display','iter'))
function [y] = funcao(x) y(1)= ( x(1).^2 ) x(2); y(2)= (2*x(2))-2;
![solucao = fsolve( funcao ,[-4 1],optimset( Display , iter ))](http://slideplayer.com.br/slide/44368/1/images/22/solucao+%3D+fsolve%28+funcao+%2C%5B-4+1%5D%2Coptimset%28+Display+%2C+iter+%29%29.jpg "function [y] = funcao(x) y(1)= ( x(1).^2 ) x(2); y(2)= (2*x(2))-2;")
49
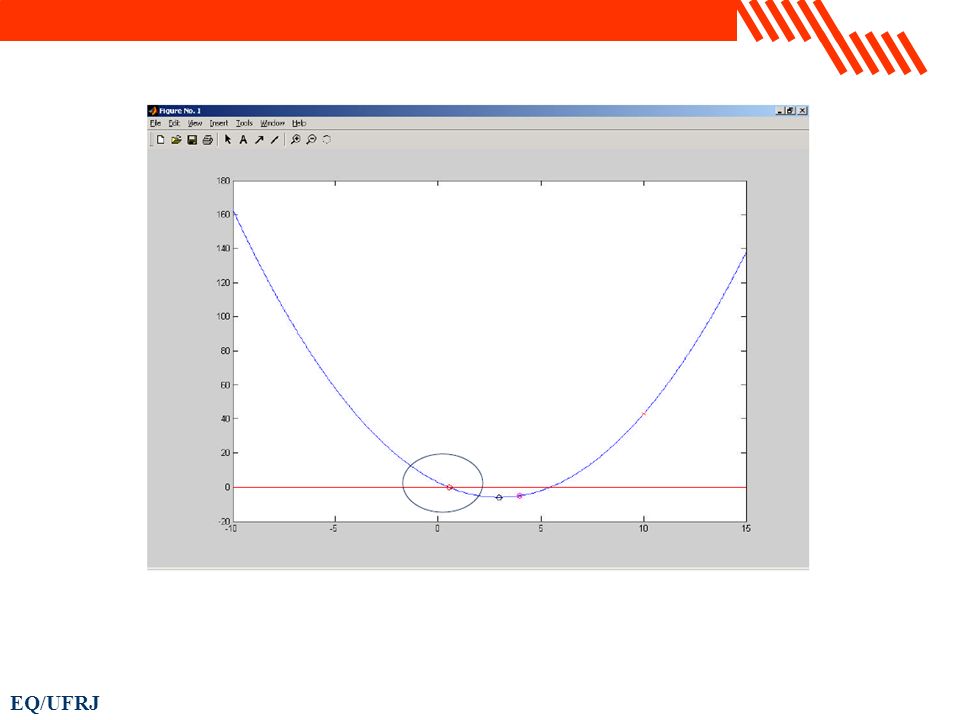
Ajuste de PID

50
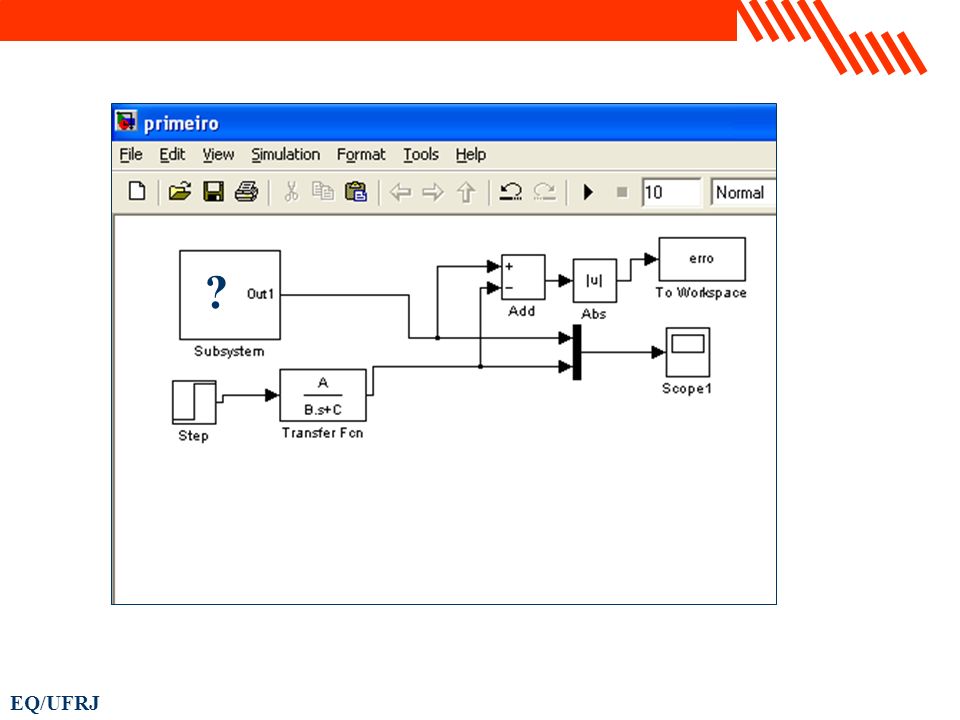
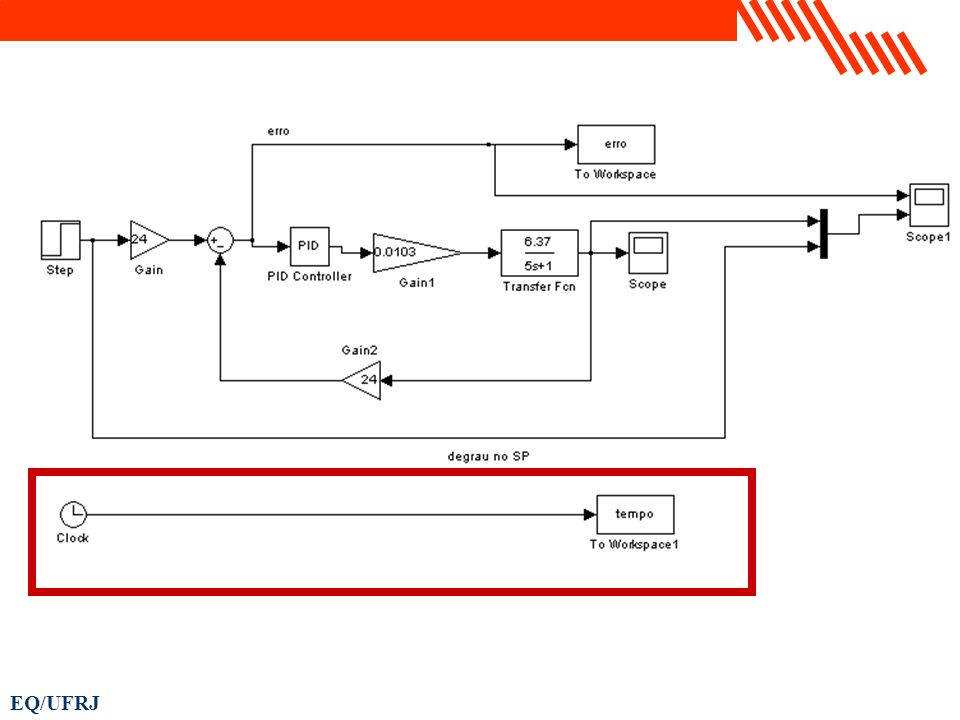
A seguinte malha de controle foi elaborada no Simulink.
Usar o Matlab para ajustar o controlador. degrau unitário no instante 5 P I D

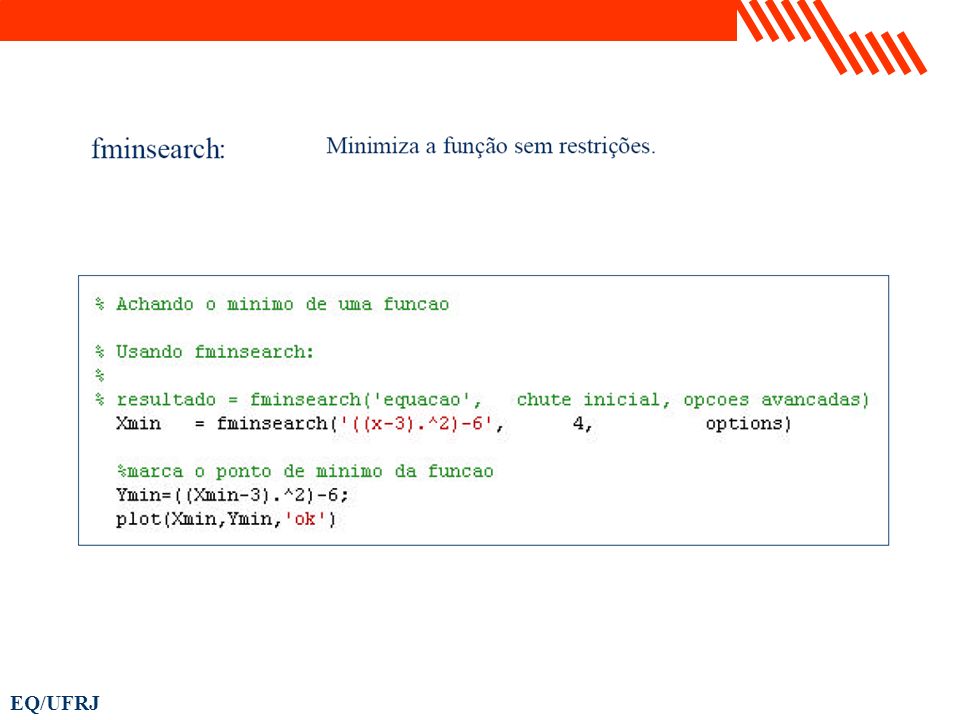
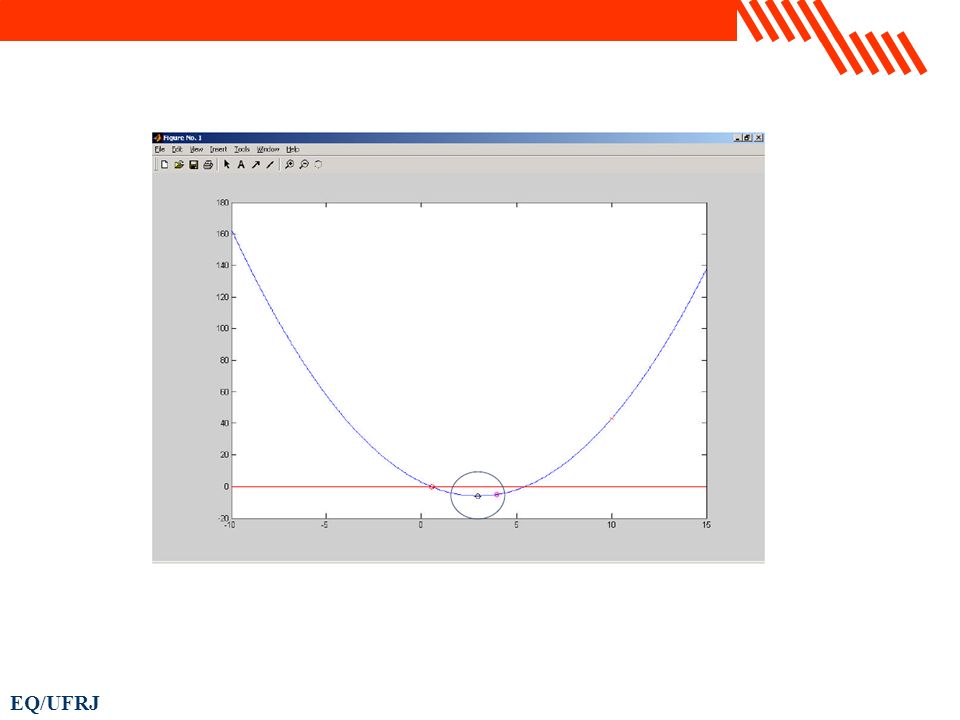
51
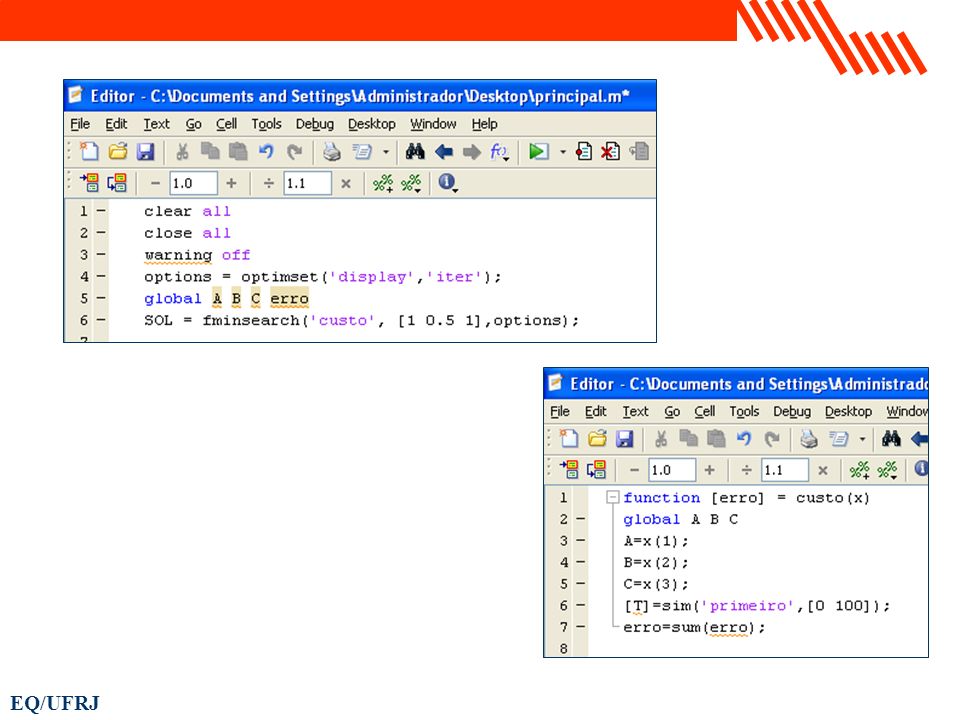
Programa principal: clear all close all warning off
options = optimset('display','iter'); global P I D erro Pmin = fminsearch('custo', [1 5 1],options)
; global P I D erro. Pmin = fminsearch( custo , [1 5 1],options)")
52
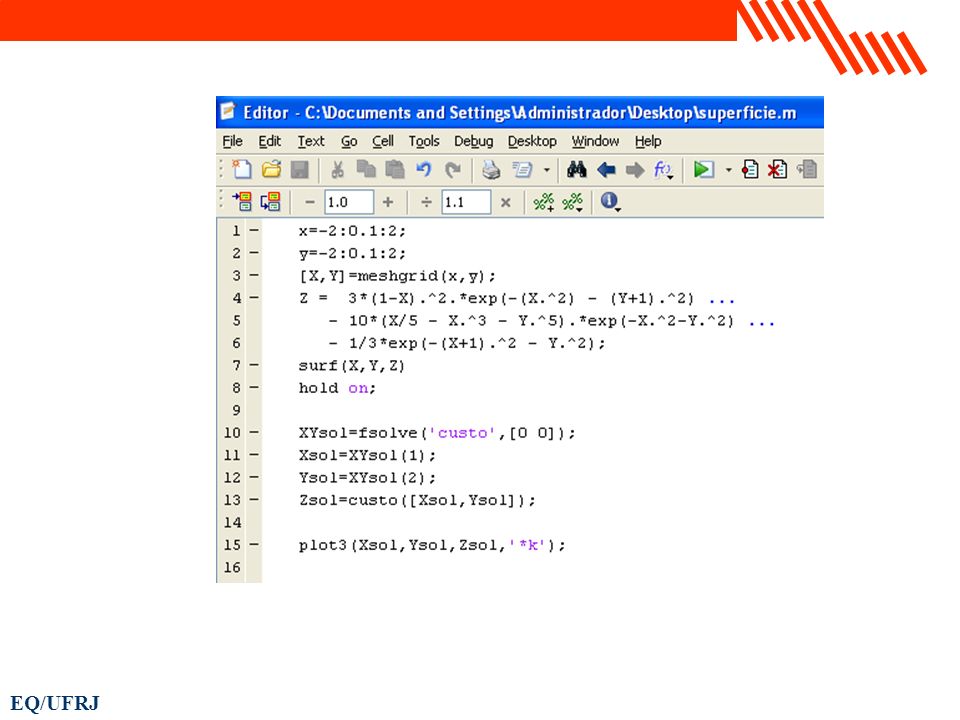
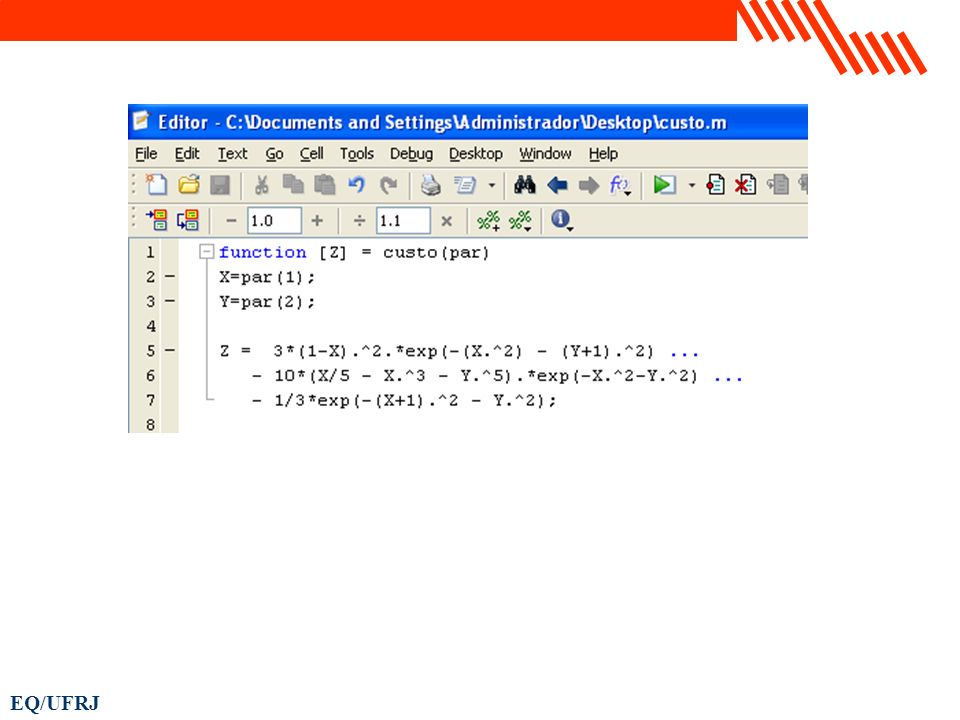
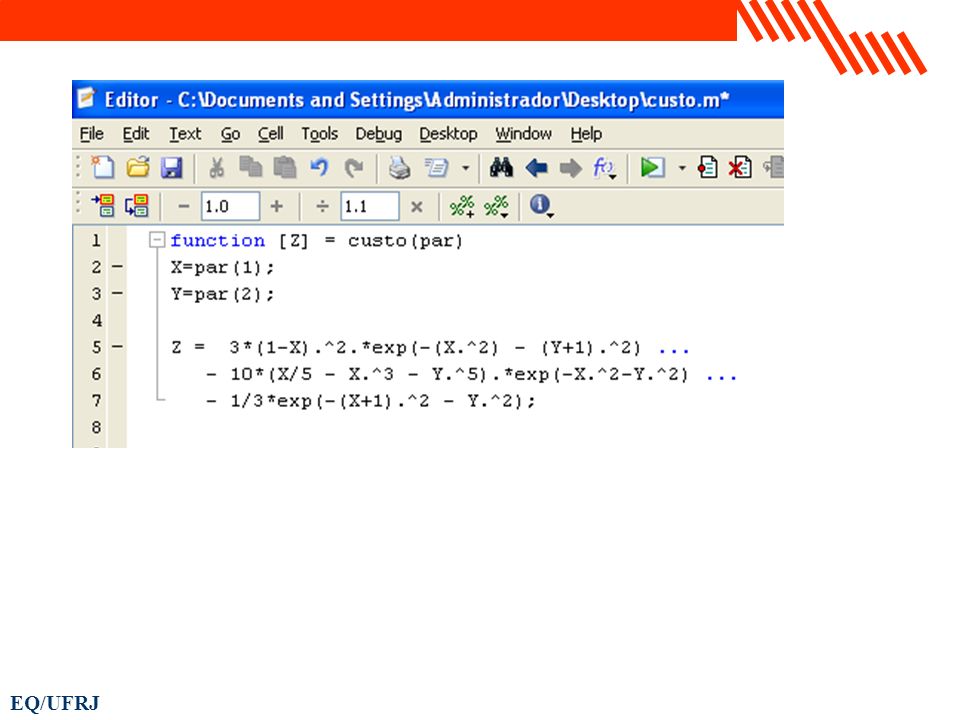
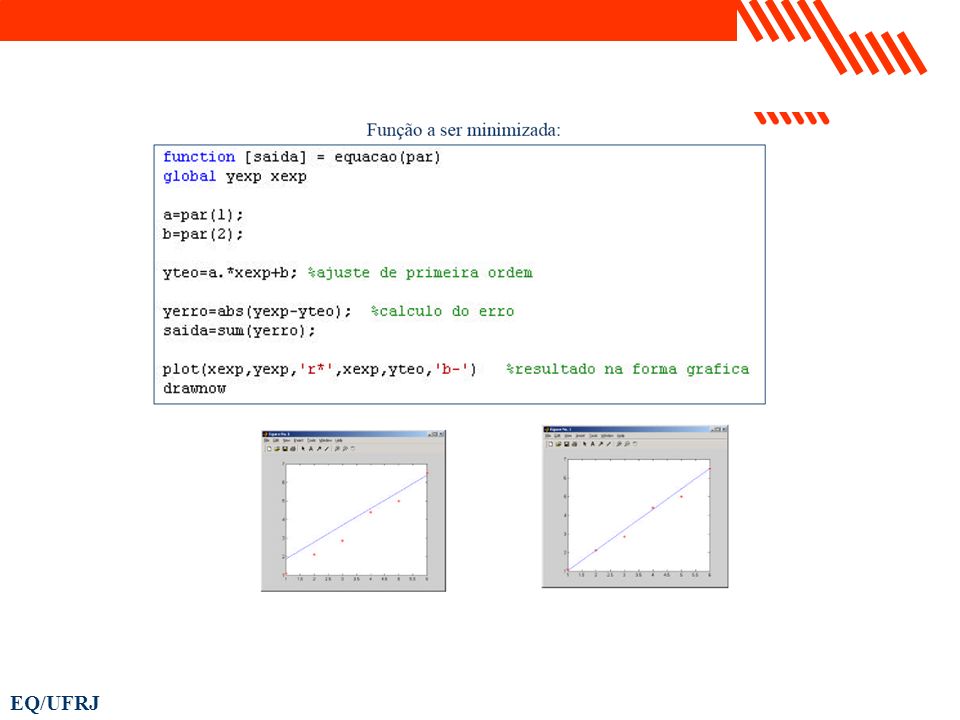
Função “custo”: function [erro] = custo(x) global P I D erro P=x(1);
I=x(2); D=x(3); [T]=sim('malha',[0 65]); erro=sum(erro.^2);
![Função custo : function [erro] = custo(x) global P I D erro P=x(1);](http://slideplayer.com.br/slide/44368/1/images/52/Fun%C3%A7%C3%A3o+custo+%3A+function+%5Berro%5D+%3D+custo%28x%29+global+P+I+D+erro+P%3Dx%281%29%3B.jpg "I=x(2); D=x(3); [T]=sim( malha ,[0 65]); erro=sum(erro.^2);")
53
Solução encontrada para degrau unitário no SP:
Pmin =

54
Arquitetura Simulink usada para gerar o gráfico
do slide anterior:

55
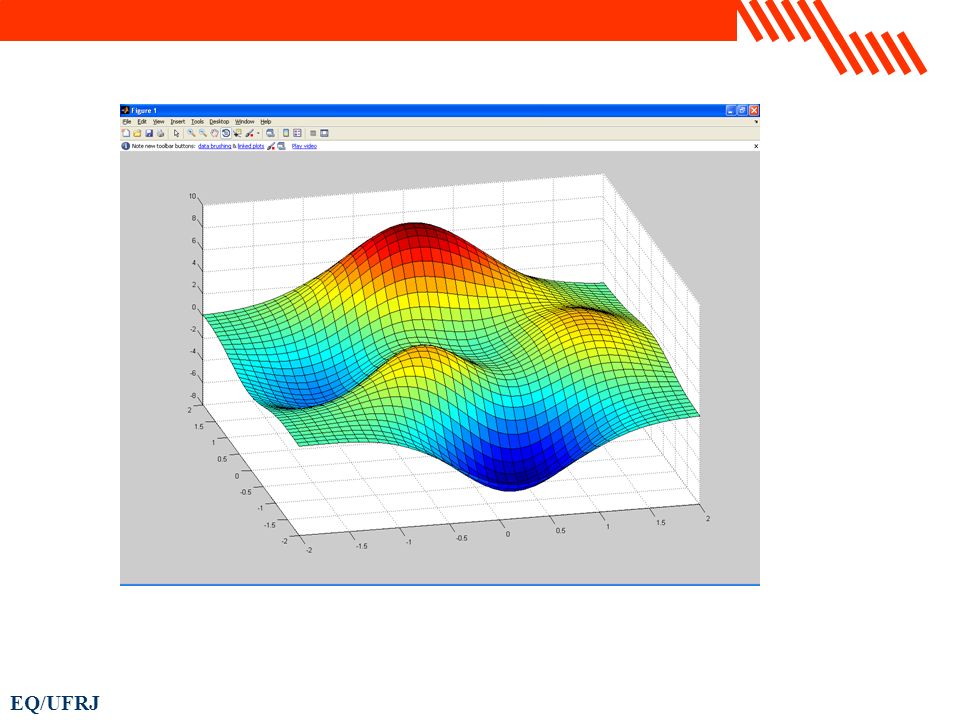
Ao invés de minimizar o somatório quadrático do erro,
posso minimizar o somatório quadrático ponderado com o tempo. Ou seja, erros em tempos mais elevados são mais significativos.

57
Programa principal: clear all close all warning off options = optimset('display','iter'); global P I D erro tempo Pmin = fminsearch('custo', [10 5 1],options)
")
58
Função custo: function [erro] = custo(x) global P I D erro tempo P=x(1); I=x(2); D=x(3); [T]=sim('malha',[0 65]); %erro=sum(erro.^2); % somatorio quadratico do erro erro=sum((erro.*tempo).^2); % somatorio quadratico do erro ponderado com o tempo
![Função custo: function [erro] = custo(x) global P I D erro tempo. P=x(1); I=x(2); D=x(3); [T]=sim( malha ,[0 65]);](http://slideplayer.com.br/slide/44368/1/images/58/Fun%C3%A7%C3%A3o+custo%3A+function+%5Berro%5D+%3D+custo%28x%29+global+P+I+D+erro+tempo.+P%3Dx%281%29%3B+I%3Dx%282%29%3B+D%3Dx%283%29%3B+%5BT%5D%3Dsim%28+malha+%2C%5B0+65%5D%29%3B.jpg "%erro=sum(erro.^2); % somatorio quadratico do erro. erro=sum((erro.*tempo).^2); % somatorio quadratico. do erro ponderado com o tempo.")
59
Resultado obtido: Pmin = Chute inicial usado:

60
Ajuste de TF

61
?
64
Ferramenta completa para treinamento...

65
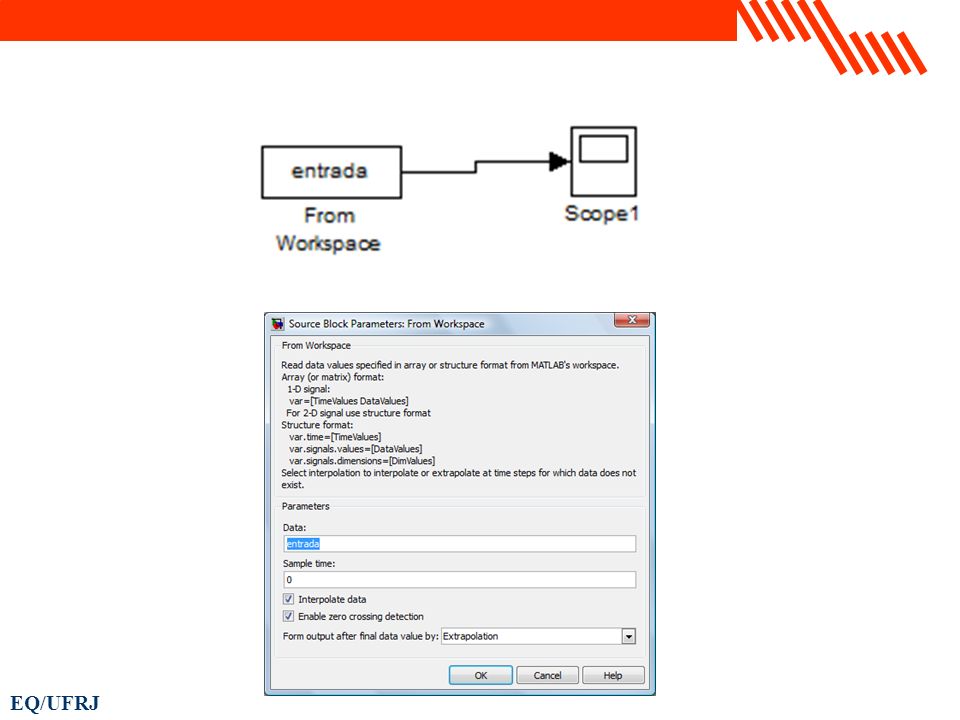
Passando dados para o Simulink

66
Gerador de dados experimentais:

68
Usando os dados experimentais:

Apresentações semelhantes












 é enviada.>")




 contador += 1 console.ConsoleWrite(contador)>")





