Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Implementação de estrutura de controle de sistema a eventos discretos em controlador lógico programável

7
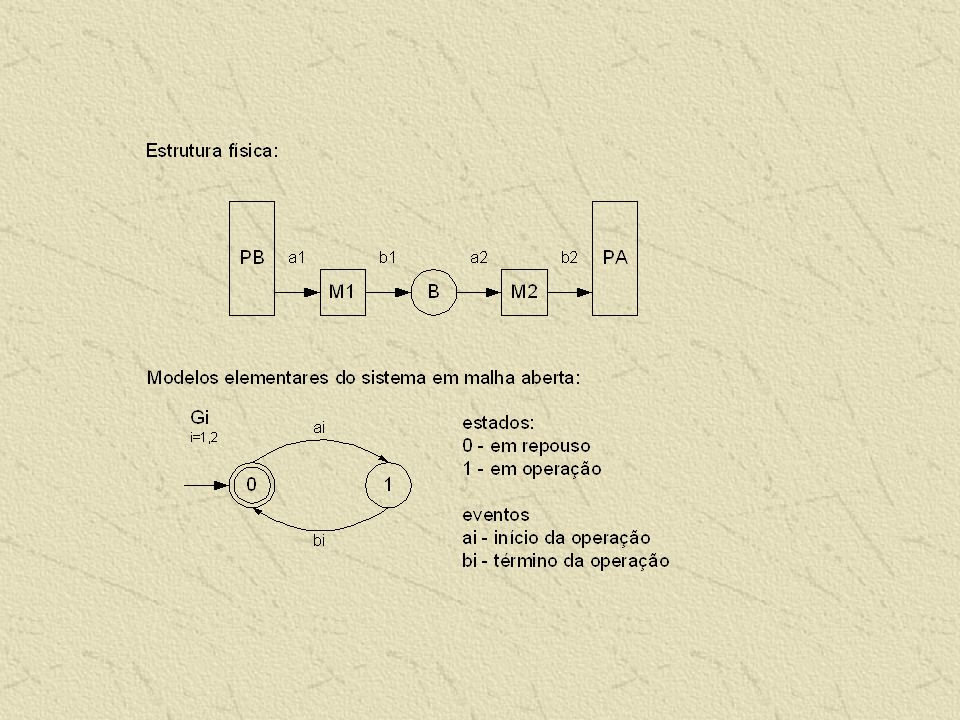
Implementação de estrutura de controle supervisório Geração espontânea de eventos pelo sistema físico Abstração realizada durante a modelagem do sistema físico Inexistência de relação direta entre os eventos utilizados na representação do sistema físico e entradas e saídas do clp Possibilidade de ativação simultânea de entradas e saídas do clp e hipótese de não-ocorrência simultânea de eventos no modelo RW

8
Implementação de estrutura de controle supervisório

9
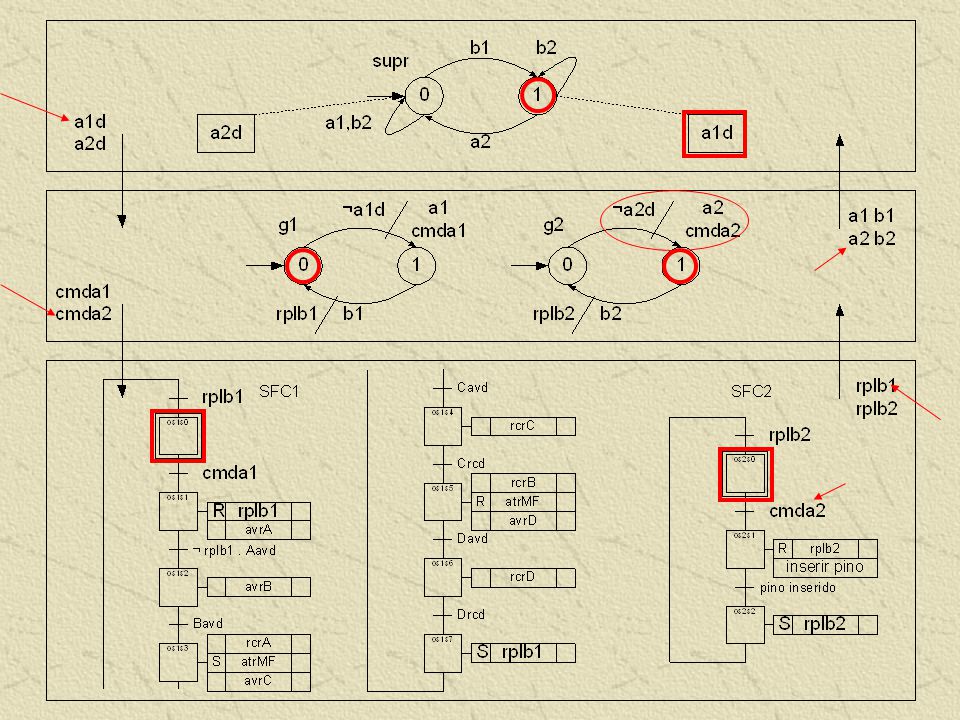
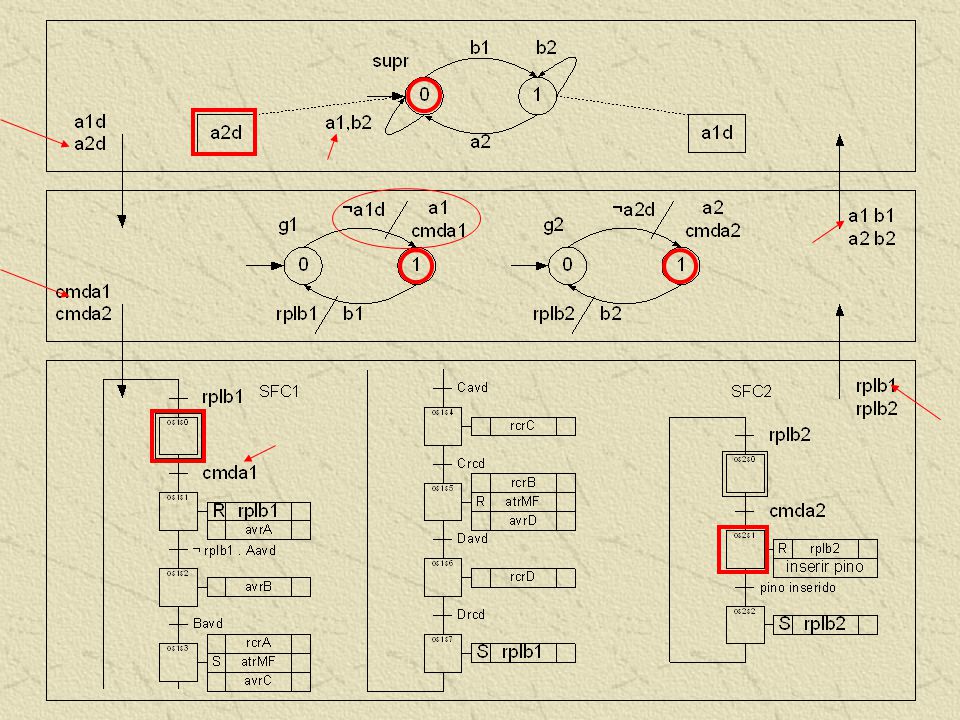
Para cada autômato G j utilizado para representar os sistemas físicos relacionar: i) a cada evento controlável de cj uma desabilitação; fd1 = {(a1,a1d)} fd2 = {(a2,a2d)} ii) a cada ocorrência de evento controlável em G j um comando; fc1 = {((0,a1),cmda1} fc2 = {((0,a2),cmda2)} iii) a cada ocorrência em G j de evento não controlável uma resposta. fr1 = {((1,b1),rplb1)} fr2 = {((1,b2),rplb2)} iv) a cada desabilitação uma negação de desabilitação fnd1= {(a1d,¬a1d)}fnd2 = {(a2d,¬a2d)}
,rplb1)} fr2 = {((1,b2),rplb2)} iv) a cada desabilitação uma negação de desabilitação fnd1= {(a1d,¬a1d)}fnd2 = {(a2d,¬a2d)}.")
10
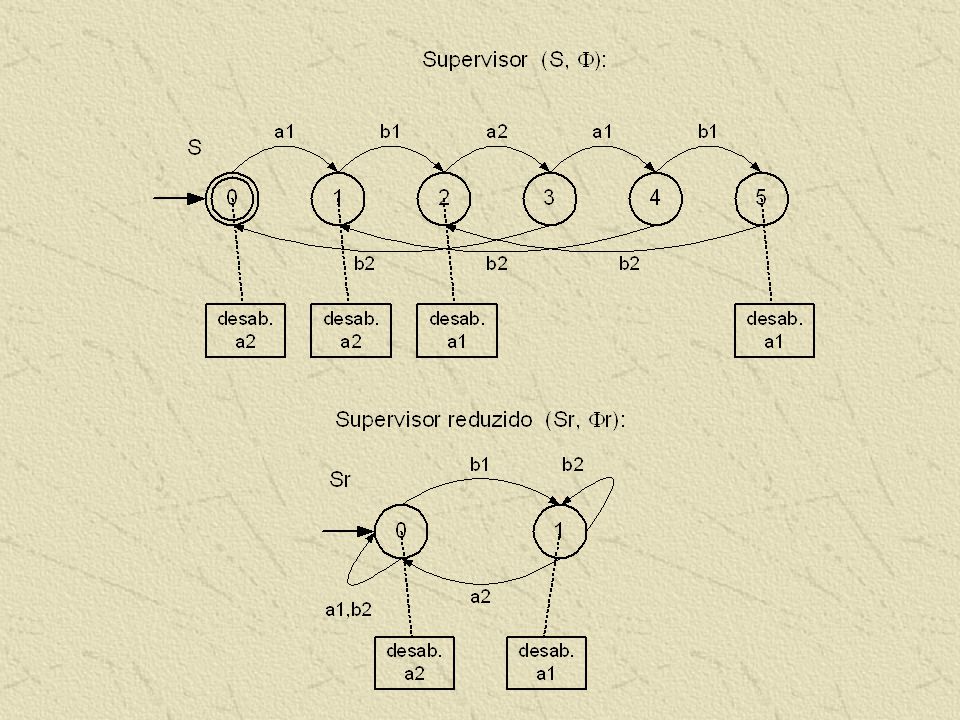
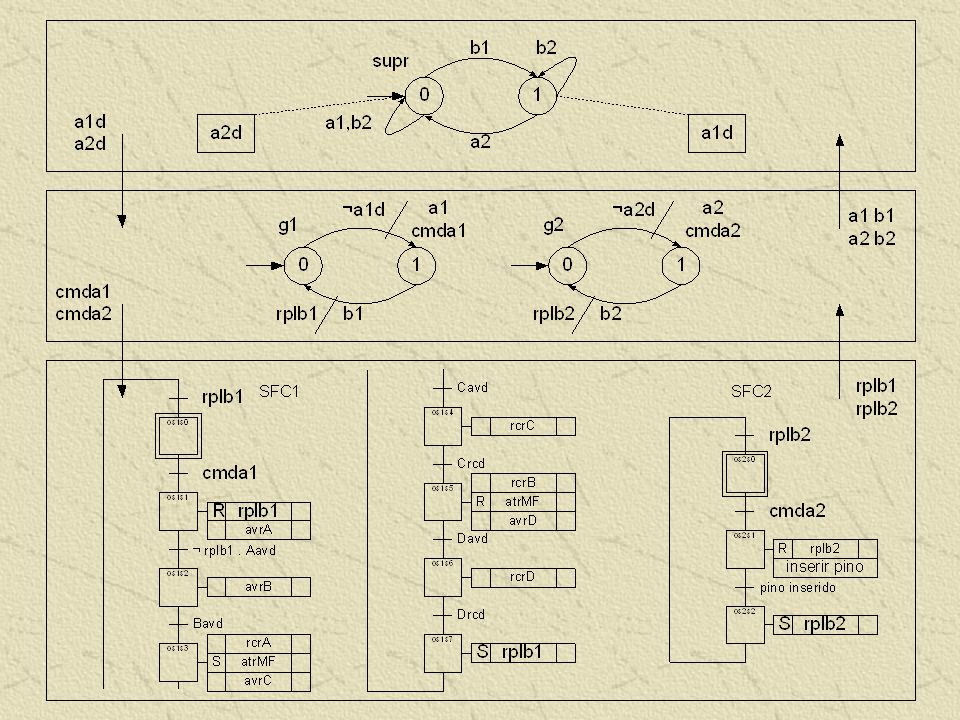
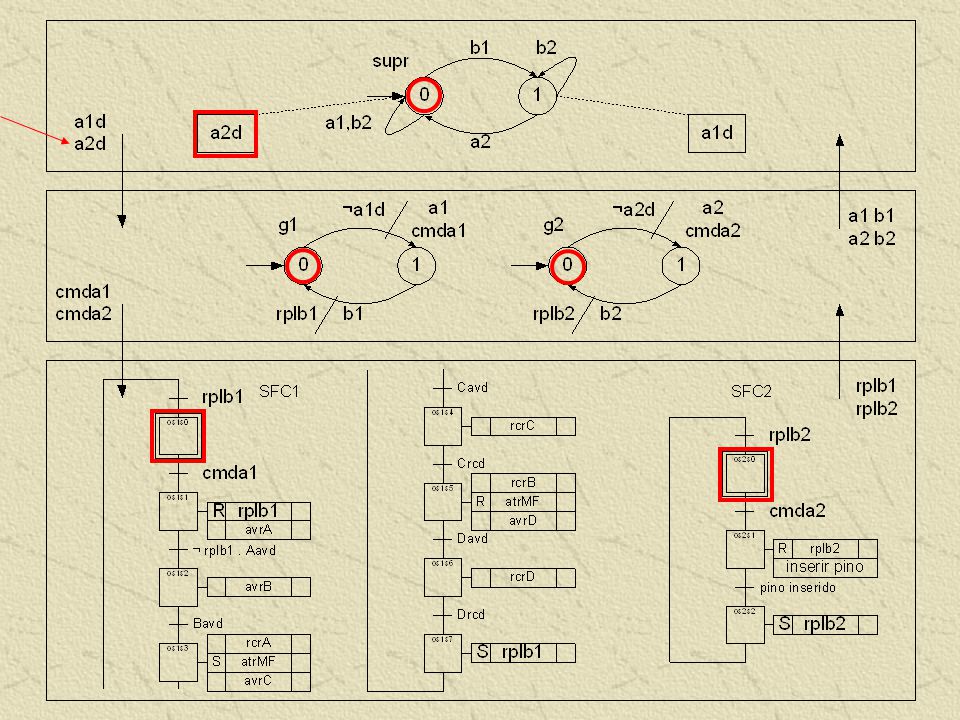
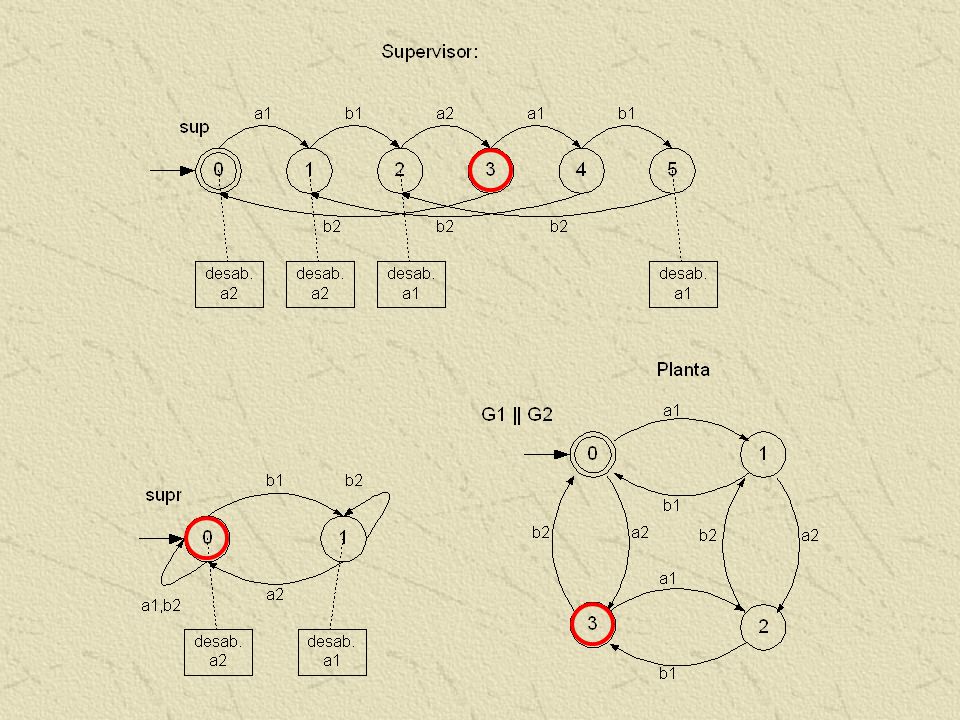
Supervisores Modulares Corresponde a implementação dos supervisores sintetizados e reduzidos obtidos anteriormente

11
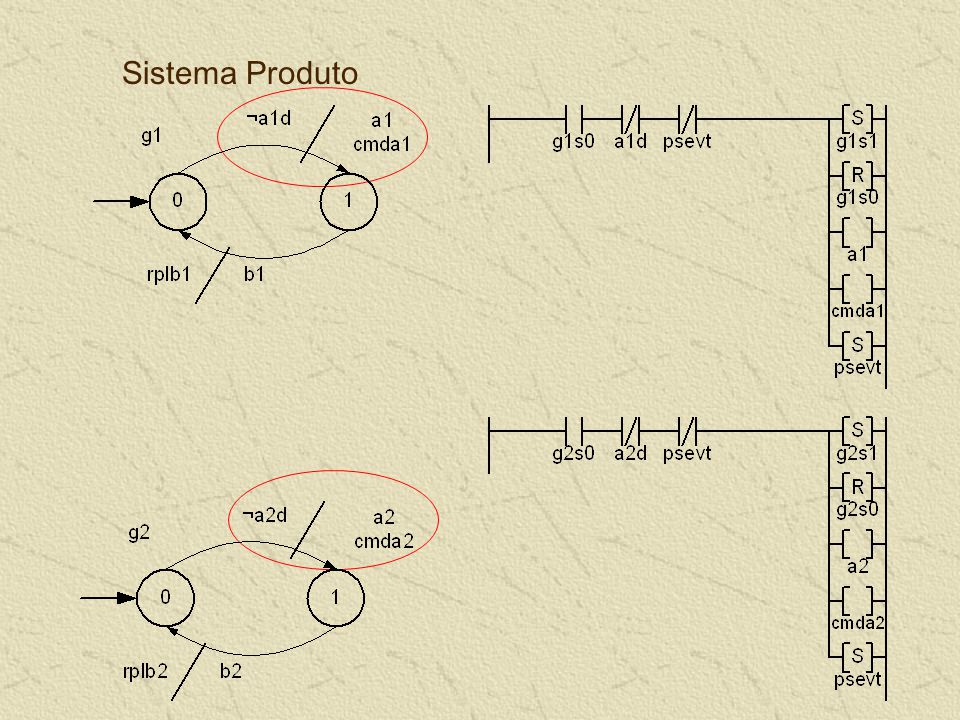
Sistema Produto A cada autômato G j utilizado para representar os sistemas físicos, relacionar um autômato g j (Máquina de Mealy) com j={1,...,p} onde p o nº de sistemas físicos j - subalfabeto de eventos (exclusivo a cada subsistema modelado); Q j - conjunto de estados; j - função de transição de estados na forma q 0j Q j - estado inicial; Q mj Q j - conjunto de estados marcados j - alfabeto de entrada, com - alfabeto de saída, com j - função de transição de estados na forma j - função de saída na forma Q j - conjunto de estados; q 0j Q j - estado inicial;
 com j={1,...,p} onde p o nº de sistemas físicos j - subalfabeto de eventos (exclusivo a cada subsistema modelado); Q j - conjunto de estados; j - função de transição de estados na forma q 0j Q j - estado inicial; Q mj Q j - conjunto de estados marcados j - alfabeto de entrada, com - alfabeto de saída, com j - função de transição de estados na forma j - função de saída na forma Q j - conjunto de estados; q 0j Q j - estado inicial;")
12
Sistema Produto Sejam: A função de transição j é obtida substituindo: - cada ocorrência de evento controlável em j pela negação da desabilitação correspondente; - cada ocorrência de evento não controlável em j pela resposta correspondente.

13
Sistema Produto Sejam: A função de saída j é obtida da seguinte forma: - a cada transição de estado de g j relacionada a uma negação de desabilitação serão gerados o evento e o comando correspondentes - a cada transição de estado de g j relacionada a uma resposta será gerado o evento correspondente

14
Sistema Produto Sejam: A função de transição de estados j do autômato g j é definida por: A função de saída j do autômato g j é definida por:

15
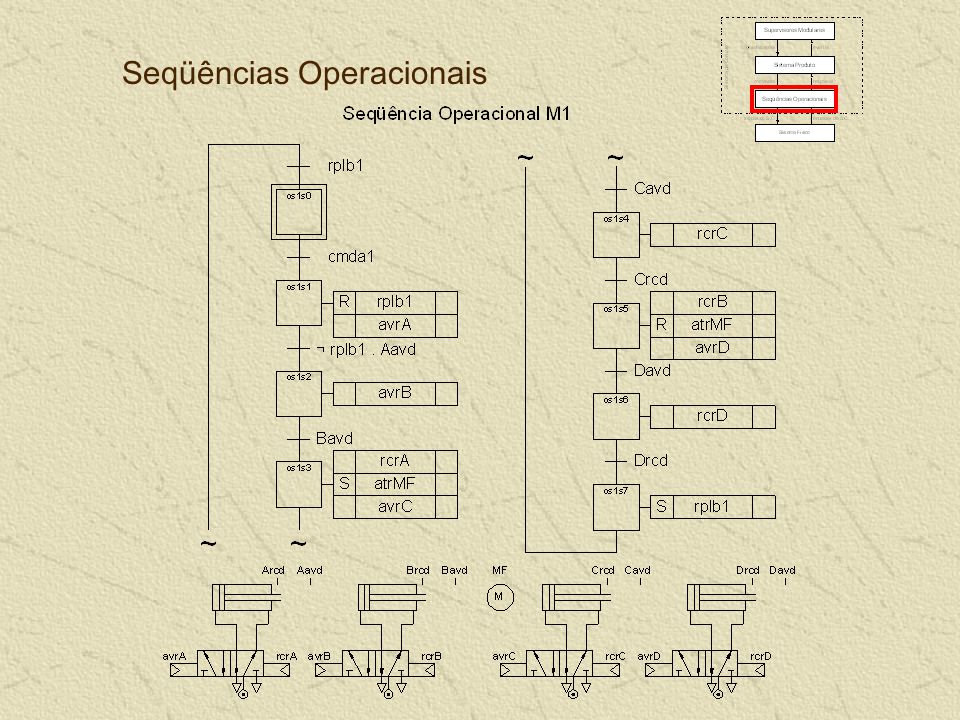
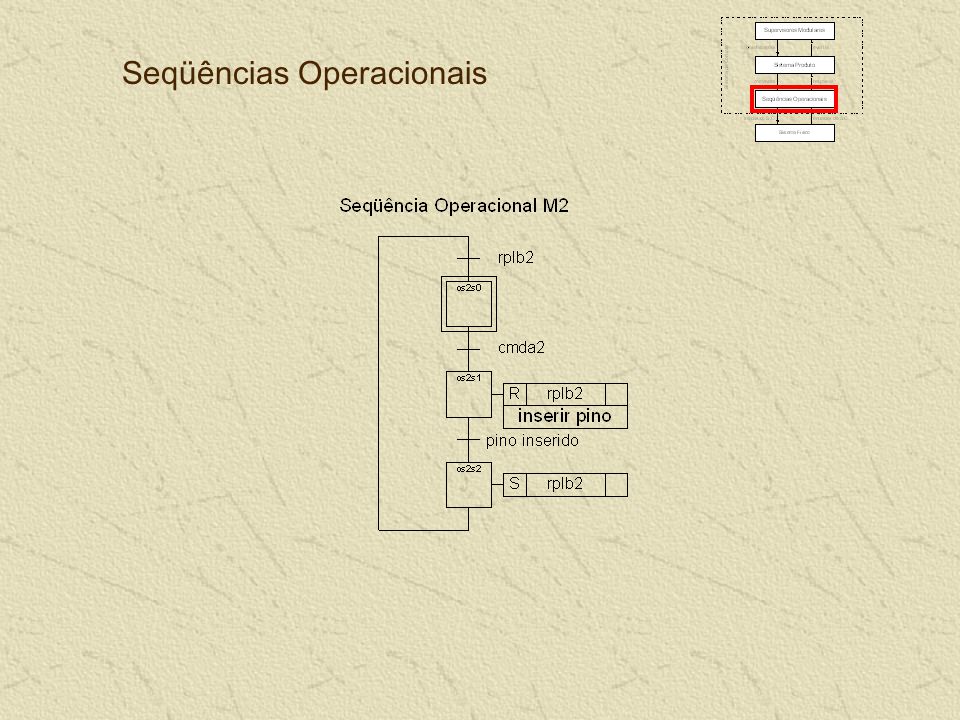
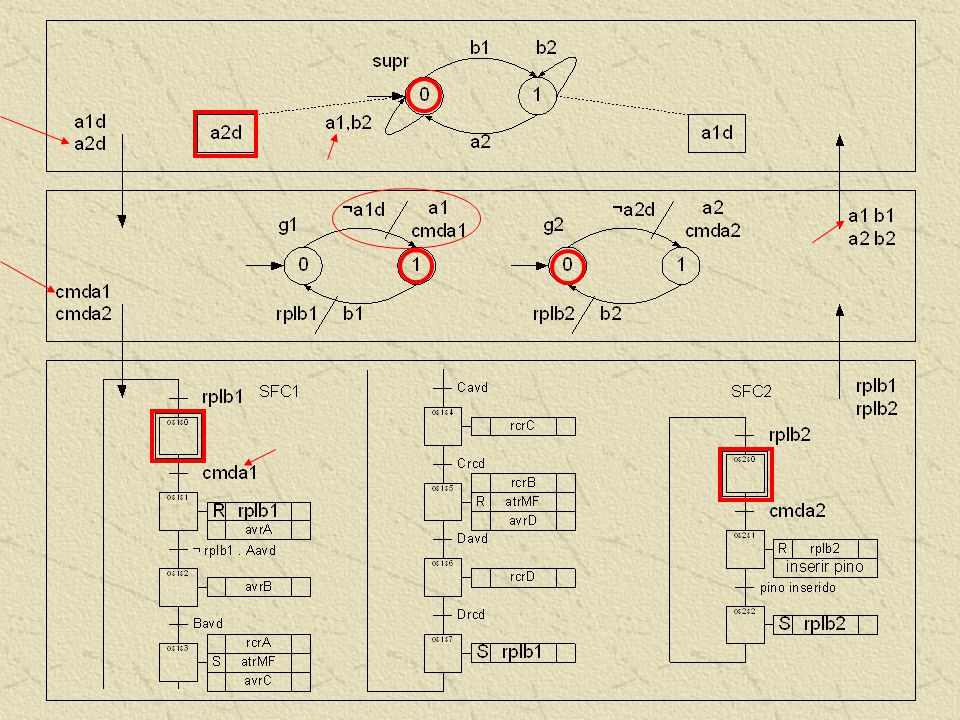
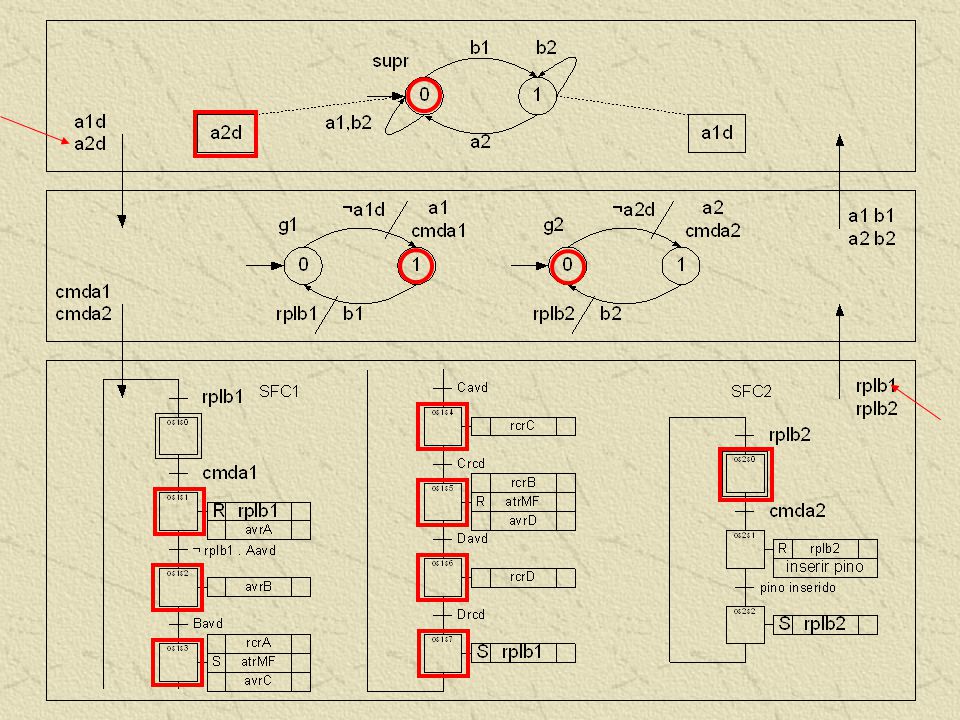
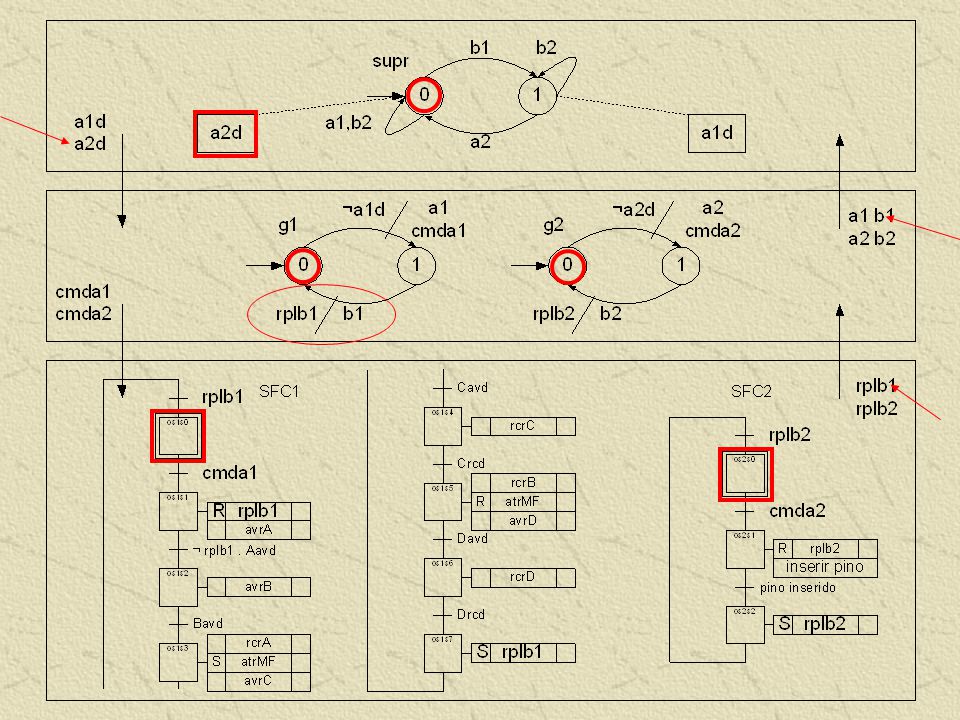
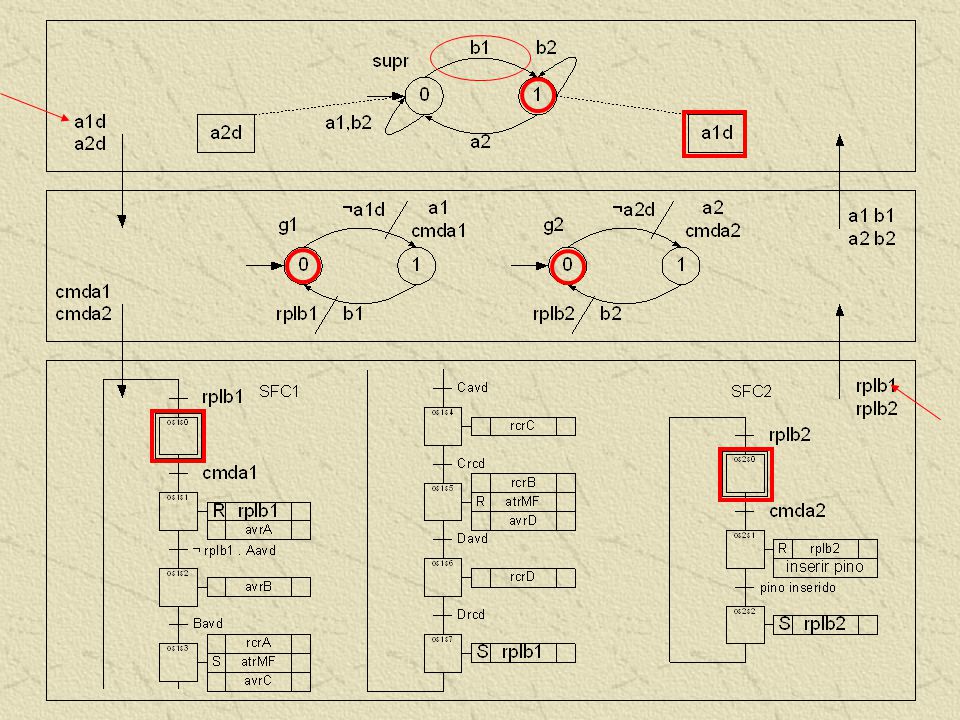
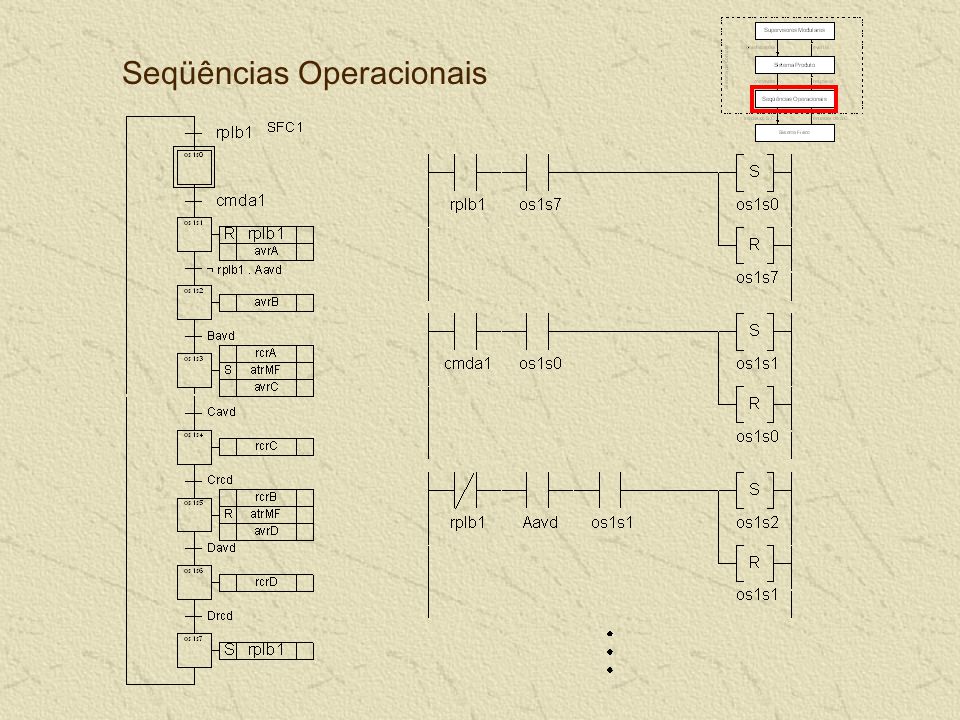
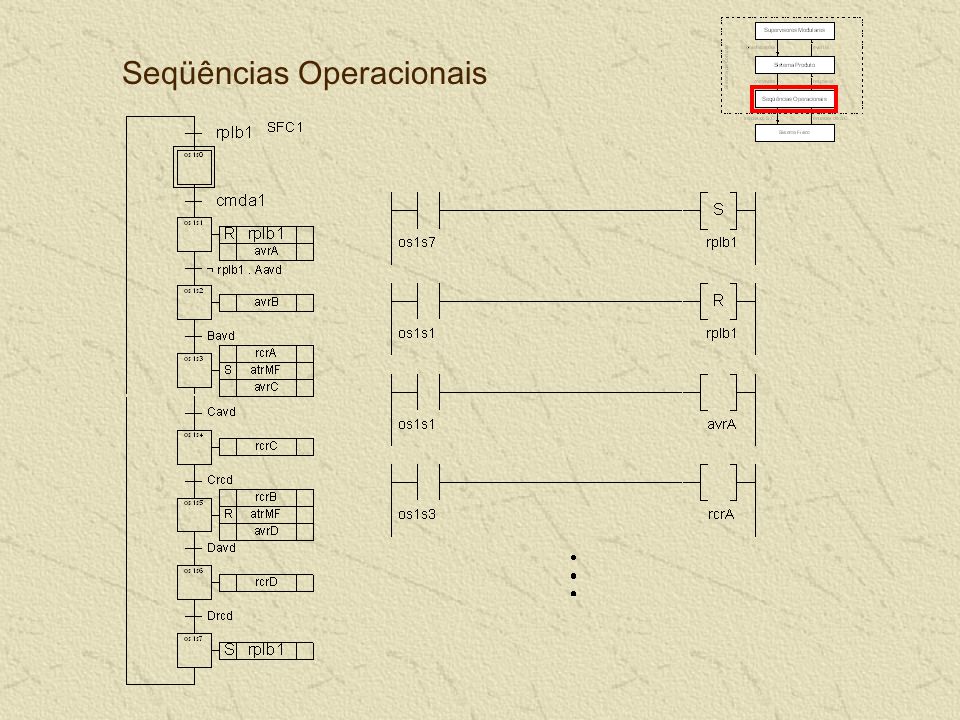
Seqüências Operacionais Corresponde ao detalhamento das atividades e funções realizadas pelo sistema físico que foram abstraídas durante a modelagem para síntese do supervisor A cada módulo G j do sistema físico há uma seqüência operacional correspondente Sequential Function Chart Coerência entre G j e o SFC correspondente:

16
Seqüências Operacionais Coerência entre G j e o SFC correspondente: i)cada comando estará relacionado a uma, e somente uma, condição de transição do SFC; ii) cada resposta deverá ser ativada com retenção em um, e somente um, passo do SFC que corresponde à ocorrência do evento não controlável; iii) todas as respostas deverão ser desativadas no passo sucessor de cada transição do SFC relacionada a um comando. Correspondência direta entre a linguagem do autômato Gj e a seqüência de comandos e respostas obtidas percorrendo cada um dos possíveis caminhos do SFC.

17
Seqüências Operacionais

30
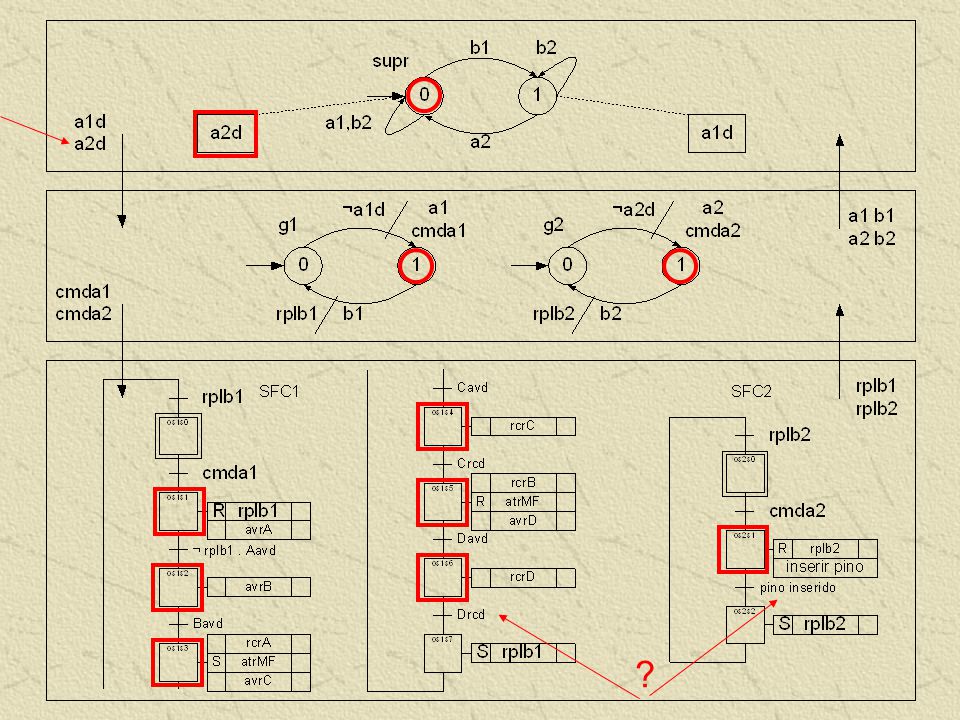
?
31
A implementação da estrutura de controle deve prever: -a ocorrência simultânea de respostas; -a habilitação simultânea de múltiplos eventos controláveis; -a ocorrência simultânea de respostas e habilitação de eventos controláveis. Não deve ser permitido a ocorrência simultânea de múltiplos eventos

32
Implementação em diagrama de escada (Ladder Diagram) de estrutura de controle supervisório
 de estrutura de controle supervisório")
33
Supervisores Modulares Para cada estado do supervisor, implementar a seguinte estrutura genérica. X n – estado do supervisor e – evento que provoca a transição do estado X n-1 para o estado X n Caso existam eventos com origem e destino no mesmo estado do supervisor (self-loop) não é necessário realizar a sua implementação tendo em vista que o supervisor irá permanecer no mesmo estado.
 não é necessário realizar a sua implementação tendo em vista que o supervisor irá permanecer no mesmo estado..")
34
Supervisores Modulares

35
Caso um estado do supervisor possa ser acessado por diversos outros estados, utiliza-se a seguinte construção:

36
Supervisores Modulares

37
Sistema Produto Não-ocorrência simultânea de eventos: A transição de estado de um módulo do sistema produto (geração de evento) desabilita toda transição de estado de módulos do sistema produto até que a estrutura do supervisor seja atualizada com o evento gerado É recomendável priorizar os eventos não-controláveis em relação aos eventos controláveis
 desabilita toda transição de estado de módulos do sistema produto até que a estrutura do supervisor seja atualizada com o evento gerado É recomendável priorizar os eventos não-controláveis em relação aos eventos controláveis")
38
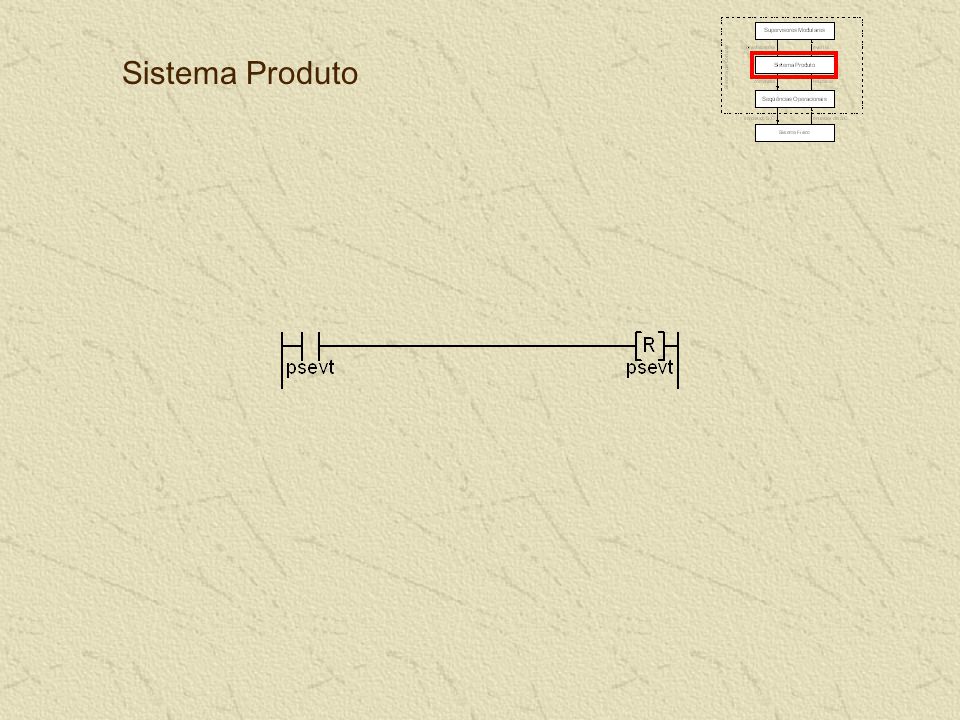
Sistema Produto Cada transição de estado de g j associada a uma negação de desabilitação de evento controlável é implementada da seguinte forma a – evento controlável ad = fd(a) ¬ad = fnd(fd(a)) cmda = fc(p n-1,a) psevt – sinaliza a transição de estado de algum módulo do sistema produto
 ¬ad = fnd(fd(a)) cmda = fc(p n-1,a) psevt – sinaliza a transição de estado de algum módulo do sistema produto")
39
Sistema Produto Cada transição de estado de g j associada a um evento não-controlável é implementada da seguinte forma b – evento não controlável rplb = fr(p n-1,b)
")
40
Sistema Produto

44
Seqüências Operacionais

47
Inicialização do Programa -Desativação de todas as variáveis internas -Desativação das saídas -Ativação das variáveis correspondentes aos estados iniciais dos autômatos do supervisor e dos módulos do sistema produto e das variáveis correspondentes aos passos iniciais dos SFC´s das seqüências operacionais

Apresentações semelhantes