Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Controlador Lógico Programável: Desenvolvimento em Ladder
Prof. Ricardo Falbo

2
O que é um CLP? É um equipamento composto basicamente por um processador que lê e executa instruções do programa residente em memória para prover o controle automático de dispositivos em um processo industrial.

3
Porque automatizar?

4
O CLP é um dispositivo computacional que através de sua programação verifica o estado das variáveis do processo e executa automaticamente as tarefas de acionamento entre outras.

5
O uso de dispositivos computacionais para o controle de processos industriais permite o aumento direto da qualidade e da produtividade.

6
Quem trabalha com CLP é essencialmente um desenvolvedor de programas, o que exige um profissional no mínimo criativo e autônomo.

7
Um Sistema de Automação

8
Software O programa pode ser desenvolvido em linguagem simples e atualmente no ambiente gráfico amigável assim chamado Integrated Development Enviroment (IDE). As IDE atuais são projetadas para desenvolver os programas, simular a aplicação, compilar, gravar, supervisionar e interagir com o funcionamento real.
. As IDE atuais são projetadas para desenvolver os programas, simular a aplicação, compilar, gravar, supervisionar e interagir com o funcionamento real.")
9
Padronização Industrial
A industria assim como outros setores tecnológicos adotam sinais padronizados de comando e controle, isto permite que o CLP possa ser reprogramado para um novo processo com pouca ou nenhuma inclusão de hardware.

10
Norma IEC61131 Para atender as demandas da comunidade industrial internacional, foi formado um grupo de trabalho dentro da International Electro- technical Commission (IEC), para avaliar o projeto de controladores lógicos programáveis, incluindo hardware, instalação, testes, documentação, programação e comunicação. A IEC é uma organização normativa internacional formada por representantes de diferentes fabricantes de CLP, fabricantes de softwares e usuários.
, para avaliar o projeto de controladores lógicos programáveis, incluindo hardware, instalação, testes, documentação, programação e comunicação. A IEC é uma organização normativa internacional formada por representantes de diferentes fabricantes de CLP, fabricantes de softwares e usuários.")
11
Partes básicas de um CLP

12
CPU A Unidade Central de Processamento possui a principal estrutura computacional do CLP. Nesta estrutura o processador é o chip responsável em gerenciar toda a estrutura de hardware bem como executar as operações planejadas em software.

13
Todos os dispositivos externos à CPU possuem um endereço dentro da Memória de Dados.
O controle destes dispositivos se faz através do dado inserido na respectiva posição de memória.

14
Unidade de Programação
É um ambiente integrado de desenvolvimento de software onde os projetistas constroem os programas em uma das cinco linguagens previstas pela IEC e transfere para a CPU através de um protocolo de gravação. Neste curso utilizaremos o software TIA.

15
TIA (Totally Integrated Automation)
A Automação Totalmente Integrada é o novo caminho para unificação de tecnologias de controle de produção e processos utilizado pela Siemens. Todos os componentes de hardware e software estão unificados em um único sistema com o nome SIMATIC.

16
Módulo de I/O São blocos de bit ou byte endereçados na RAM da CPU com a finalidade de enviar ou receber dados externos.

17
Os pinos (bit) de entrada e saída são específicos para o controle de dispositivos industriais, sendo assim, a unidade de I(input)/O(output) em questão possui características elétricas especiais e geralmente fogem o padrão TTL.
 de entrada e saída são específicos para o controle de dispositivos industriais, sendo assim, a unidade de I(input)/O(output) em questão possui características elétricas especiais e geralmente fogem o padrão TTL.")
18
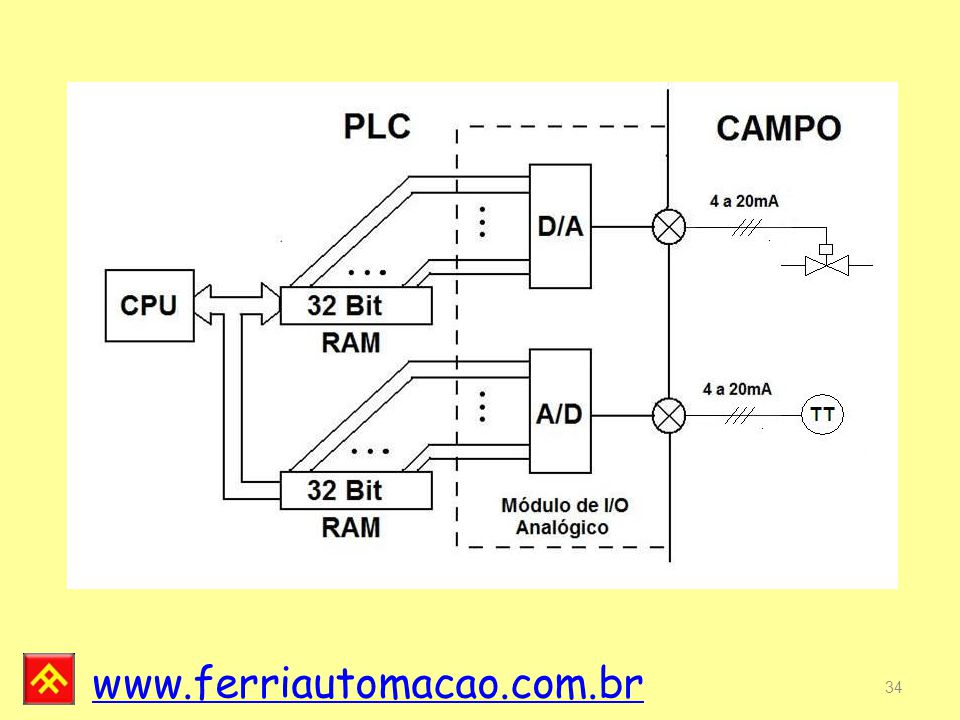
Módulo Analógico São na realidade conversores A/D ou D/A com a função de interagir com os dispositivos industriais que necessitam de controle analógio.

19
O valor analógico fornecido ao PLC é convertido pelo A/D interno em digital e armazenado no seu endereço respectivo de RAM. Caso o PLC necessite enviar um dado analógico, inicialmente é inserido o valor digital no endereço de memória específico, o módulo D/A converte e envia pela sua saída analógica.

20
Módulo de Comunicação A integração remota entre vários sistemas de controle e supervisão só é possível através de protocolos específicos de comunicação serial.

21
Uma tomada de decisão é considerada em Tempo Real quando o tempo de comunicação é determinístico e o pior caso é inferior ao tempo máximo aceitável.

22
Ciclo de Scan É a rotina continua que o PLC executa para manutenção operacional dos blocos de programa, de acordo com a seguinte seqüência: 1º As entradas físicas são lidas e guardadas em um espaço reservado de memória; 2º São executadas as operações de acordo com o programa escrito; 3º Atualização das saídas em função do resultado das operações.

23
Startup

24
O tempo de um Scan, também conhecido como tempo de varredura, varia de acordo com o Programa, o Hardware e o Sistema Operacional do PLC. Este tempo é crítico porque uma entrada pode variar seu estado dentro do período de Scan e acabar não sendo percebida.

25
Unidade de Entrada e Saída Digital
Sinais digitais (lógicos) são aqueles que assumem somente dois estados ON (1) e OFF (0) identificados mediante um nível de tensão estipulado pelo projeto do PLC.
 são aqueles que assumem somente dois estados ON (1) e OFF (0) identificados mediante um nível de tensão estipulado pelo projeto do PLC.")
26
A unidade de entrada opera de acordo com os sinais emitidos por botoeiras e sensores para torná-los compatíveis com os níveis da CPU.

27
Circuito externo Circuito interno

28
A unidade de saída trata os sinais emitidos pela CPU para enviá-los aos dispositivos que devem ser acionados, chamados de atuadores (contactoras, válvulas, lâmpadas, etc). Normalmente são encontrados PLC com os seguintes tipos de saídas: - A relé → Para atuadores AC ou DC; - A Triac → Para atuadores AC e - A transistor → Para atuadores DC

30
Unidade Analógica Sinais analógicos são aqueles que assumem quaisquer valor incluído dentro do limite inferior e superior (range). Representam grandezas físicas como temperatura, pressão, velocidade aceleração, etc. A transformação destas grandezas em sinais elétricos é feita através de um dispositivo chamado transdutor.
. Representam grandezas físicas como temperatura, pressão, velocidade aceleração, etc. A transformação destas grandezas em sinais elétricos é feita através de um dispositivo chamado transdutor.")
31
Sendo totalmente digital o processamento de um PLC, é fácil concluir que o primeiro tratamento feito ao sinal analógico é transformá-lo em um sinal digital, através de um conversor A/D.

32
É possível que em um projeto com PLC necessite enviar um sinal analógico representando uma porção de um determinado range. Para tais aplicações é necessário uma saída analógica normalizada ao atuador alvo.

33
O mercado mundial aceitou como padrão sinais analógicos na faixa de 0 a 5Vdc ou 0 a 10Vdc para informações trafegando em tensão e 0 a 20mA ou 4 a 20mA para informações trafegando em corrente.

35
Linguagem de Programação
A programação de um PLC é regulamentada pela IEC61131 e prevê cinco linguagens diferentes para desenvolvimento do software de aplicação: - Linguagem gráfica: . Diagrama Ladder; . Diagrama de Blocos Funcionais e .Sequenciamento Gráfico de Funções. - Linguagem Textual: . Lista de Instruções e . Texto Estruturado.

36
Diagrama Ladder (LD) - Semelhante a um esquema elétrico funcional, é certamente a linguagem mais utilizada em todo mundo, nos EUA chegam a superar 90% de aceitação. Ladder significa escada, o motivo é que visualmente o esquema lembra uma escada e cada degrau é chamado de rung.

37
Diagrama de Blocos Funcionais (FBD) - É uma linguagem de portas lógicas que permite desenhar um esquema clássico de eletrônica digital.
 - É uma linguagem de portas lógicas que permite desenhar um esquema clássico de eletrônica digital.")
38
As Transições verificam as condições para a mudança ao próximo passo.
Sequenciamento Gráfico de Funções (SFC) - Linguagem desenvolvida na França com o nome de Grafcet. Representa o funcionamento por passo (S1, S2, ...) de um processo e cada bloco é um estado do processo (Máquina sequencial). As Transições verificam as condições para a mudança ao próximo passo.
 - Linguagem desenvolvida na França com o nome de Grafcet. Representa o funcionamento por passo (S1, S2, ...) de um processo e cada bloco é um estado do processo (Máquina sequencial). As Transições verificam as condições para a mudança ao próximo passo.")
40
Um sistema de controle seqüencial é um sistema de controle que é executado passo a passo. Este muda de um passo para o próximo passo quando as condições de habilitação forem atendidas. Uma característica do sistema de controle seqüencial é a subdivisão das tarefas de controle em Passos e Transições (condições de habilitação de passos).
..")
41
Exemplo de Ação

42
Outras Ações

43
Lista de Instruções (IL) - É praticamente a linguagem de máquina semelhante ao Assembly.
 - É praticamente a linguagem de máquina semelhante ao Assembly.")
44
Texto estruturado (ST) - É a linguagem de programação de alto nível como C, Pascal e Basic. As vezes esta linguagem é indispensável em aplicações que exijam operações complexas.

45
Ladder Denominada também de esquema a contatos, é estruturada a partir de símbolos gráficos que representam lógicas eletromecânicas.

46
Os contatos são acionados por variáveis do programa, sendo variável em nível lógico “1” (ON) contato ativado e em nível lógico “0” (OFF) contato desativado. Na a figura acima se variável I0.0 estiver em nível lógico “1” o contato estaria fechado e estado lógico existente no terminal da esquerda seria copiado para o terminal da direita.

47
Na figura acima se a variável Q0
Na figura acima se a variável Q0.0 assumir o estado lógico “1” será porque a saída foi acionada, ou seja, o estado lógico do terminal da direita é “ON” . O esquema Ladder completo é composto de uma linha vertical à esquerda que representa um nível lógico “ON” constante e outra linha vertical à direita fechando cada rung, mais “n” linhas horizontais.

49
A barra vertical à esquerda fornece o estado lógico ON constantemente, a lógica de cada network irá permitir ou não que este estado alcance a barra vertical de fechamento. Em cada network existirá uma carga (saída) e esta será acionada se a leitura do seu terminal a esquerda for “ON”.
 e esta será acionada se a leitura do seu terminal a esquerda for ON ..")
50
Para que a saída seja acionada é necessário que a variável agregada a instrução Contato Normalmente Aberto (I0.0) esteja em nível lógico 1 (ON), nesta condição o estado do terminal esquerdo do contato (ON) é copiado para o terminal à direita.
 esteja em nível lógico 1 (ON), nesta condição o estado do terminal esquerdo do contato (ON) é copiado para o terminal à direita.")
51
É importante observar que a variável Q0
É importante observar que a variável Q0.0 assume a condição ON por consequência do acionamento da saída. Podemos dizer que o estado da variável agregada a uma saída é a solução de cada network, as variáveis QX.X são refletidas no pórtico de saída do PLC e com isso podem ser usadas para o acionamento de atuadores.

52
Network A lógica é normalmente separada em pequenos pedaços chamados Networks. O programa é executado uma Network por vez, da esquerda para a direita e de cima para baixo. Quando a CPU chega ao fim do programa, volta ao começo. Cada Network só pode ter uma saída ou saídas em paralelo. Se nomear uma saída Qx.x ela NÃO pode aparecer novamente em outra Network como saída, podendo ser usada como endereço de entrada, fazendo que a ação desta Network esteja condicionada à ação anterior.

53
Instruções de lógica Ladder
Para as instruções abaixo, o estado do terminal à esquerda é copiado para do terminal à direita, somente se: O estado da variável booleana associada for ON. O estado da variável booleana associada for OFF.

54
O estado do terminal à esquerda é copiado para do terminal à direita durante uma varredura, somente se houver uma transição positiva (borda de subida) do estado da variável booleana associada.
 do estado da variável booleana associada.")
55
O estado do terminal à esquerda é copiado para do terminal à direita durante uma varredura, somente se houver uma tansição negativa (borda de descida) do estado da variável booleana associada.
 do estado da variável booleana associada.")
56
Para as saídas o estado do terminal à esquerda é copiado para do terminal à direita. Se o estado lógico copiado for ON, a variável booleana associada vai para:

57
ON ON e só volta para OFF se for resetado por outra instrução. OFF e só volta para ON se for setado por outra instrução. O parâmetro “N” nas instruções SET e RESET determina a quantidade de endereços, a partir do endereço agregado a instrução, que serão afetados pela instrução.

58
Instruções de Controle de Programa
A instrução END condicional termina o SCAN corrente com base na condição do precedente lógico. A instrução STOP termina a execução de seu programa, fazendo com que a CPU transite do modo RUN para o modo STOP. A instrução WDR reseta o registro do time Watchdog.

59
A instrução JUMP desvia o programa para o Label N.
Instruções de Jump A instrução JUMP desvia o programa para o Label N.

60
Representação Ladder/FBD

61
Variáveis e Dados Dado é uma informação numérica binária necessária ao processamento e poderá ser armazenado em uma variável. Variável é uma ou mais posições (endereços) de memória que poderá assumir qualquer valor dentre o conjunto de valores possíveis.
 de memória que poderá assumir qualquer valor dentre o conjunto de valores possíveis.")
63
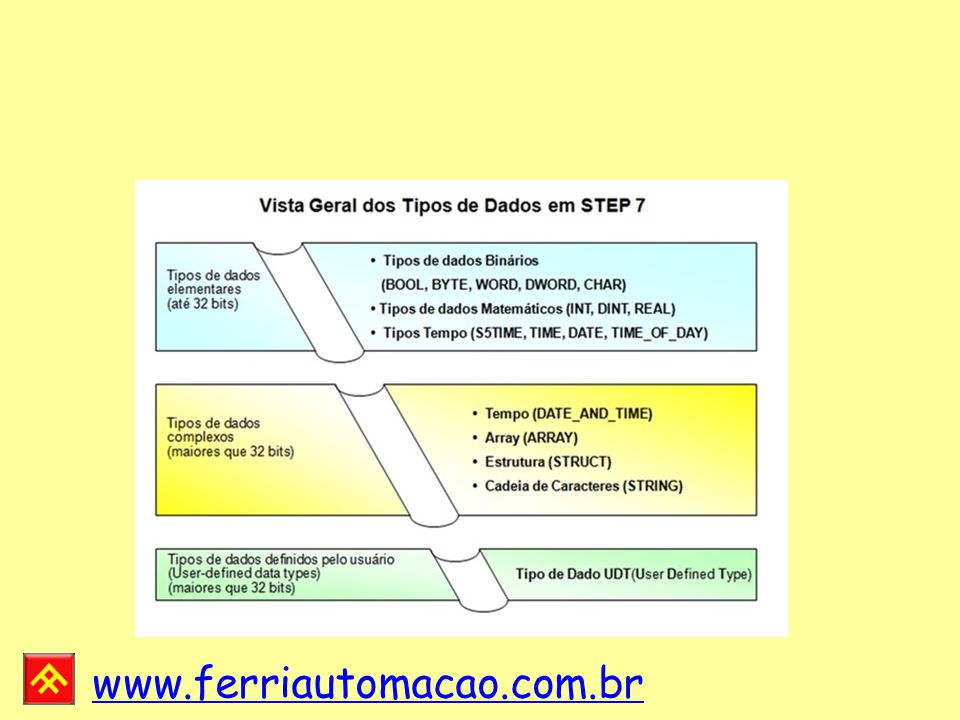
Obs: Os números Reais seguem o padrão ANSI/IEEE 754—1985.

64
Variáveis do tipo de dado S5TIME são necessárias para especificação de valores de tempo (funções temporizadores S5). Você especifica o tempo em horas, minutos, segundos ou milisegundos. Você pode inserir os valores temporizadores com um “underline“ (1h_4m) ou sem um “underline“ (1h4m). As funções FC33 e FC40 da biblioteca de conversão do formato S5TIME para o formato TIME e do formato TIME para o formato S5TIME.
 ou sem um underline (1h4m). As funções FC33 e FC40 da biblioteca de conversão do formato S5TIME para o formato TIME e do formato TIME para o formato S5TIME..")
65
Uma variável do tipo de dado TIME toma o formato de palavra dupla
Uma variável do tipo de dado TIME toma o formato de palavra dupla. Esta variável é usada, por exemplo, para especificação de valores de temporizadores em funções de temporização IEC. O conteúdo da variável é interpretado como um número DINT em milisegundos e pode ser tanto positiva como negativa (p.ex.: T#1s = L#1000, T#24d20h31m23s647ms = L# ).
.")
66
Uma variável do tipo de dado DATE é armazenado em uma palavra (word) na forma de inteiro não sinalizado. O conteúdo da variável representa o número de dias desde (p.ex.: D# = W#16#FF62)
.")
67
Uma variável do tipo de dado TIME_OF_DAY toma o formato de palavra dupla. Ele contem o número de milisegundos desde o início do dia (0:00 hora) no formato de um inteiro não sinalizado (p.ex.: TOD#23:59: = DW#16#05265B77).
 no formato de um inteiro não sinalizado (p.ex.: TOD#23:59: = DW#16#05265B77)..")
68
Tipos de Dados Complexos

69
Tipos de endereçamento
Absoluto - Especificamos o endereço (por ex. a entrada I0.0) diretamente. Neste caso não é necessária uma tabela de símbolos, contudo o programa torna-se de difícil leitura. Simbólico - Utilizamos símbolos (por ex., MOTOR_ON) no lugar dos endereços absolutos. Na tabela simbólica são armazenados os símbolos para as entradas, saídas, temporizadores, contadores, bits de memória e blocos.
 diretamente. Neste caso não é necessária uma tabela de símbolos, contudo o programa torna-se de difícil leitura. Simbólico - Utilizamos símbolos (por ex., MOTOR_ON) no lugar dos endereços absolutos. Na tabela simbólica são armazenados os símbolos para as entradas, saídas, temporizadores, contadores, bits de memória e blocos.")
70
Acessando a memória do PLC
Existem diferentes área de memória ou variáveis que podem ser utilizadas no programa de acordo com a necessidade, o escopo e a configuração do hardware.

71
Tipos de Escopo O termo escopo global significa que o mesmo local de memória pode ser acessado por qualquer entidade do programa principal, sub-rotina ou rotina de interrupção. Já o termo escopo local significa que a alocação de memória está associada com a entidade de programa em particular.

72
Tipos de Variáveis Siemens (Área de Memória)
I – São divididas em bytes que representam imagens das entradas físicas, a cada início do ciclo de varredura este registros são atualizados. É possível acessar o registro de entrada em bits, bytes, words ou double-words. Exemplo: I0.2 ou IB0

73
Para acessar um bit de entrada é necessário especificar o endereço incluindo o identificador da área de memória, o endereço do byte e o número do bits.

74
Q – Registros divididos em bytes que representam imagens das saídas físicas, a cada fim do ciclo de varredura estes registros são copiados para as saídas físicas. É possível acessar o registro de saída em bits, bytes, words ou double-words. Exemplo: Q1.2 ou IB2

75
AI – Registros divididos em words que representam imagens das entradas analógicas. Só é possível acessar o registro de entrada em words. São acessadas com endereço de byte em pares. Exemplo: AI0, AI2, ...

76
AQ – Registros divididos em words que representam imagens das saídas analógicas. Só é possível acessar o registro de saída em words. São acessadas com endereço de byte em pares. Exemplo: AQ0, AQ2, ...

77
V – São variáveis globais e podem ser usadas para armazenar resultados intermediários de operações inteiras ou em ponto flutuante realizadas pelo controle lógica em seu programa. São divididas em bytes.

78
Para acessar um byte, word ou double-word da memória de dados, é necessário incluir a designação da dimensão dos dados. No exemplo acima o MSB do dado ficara no endereço 1, já LSB será guardado no endereço 2.

79
É possível acessar um bit de uma memória de dados.

80
Cabe destacar que existe sobreposição dos operandos, isto é, um mesmo conjunto de dados (bits) pode fazer parte de vários operandos. Este particularidade confere grande flexibilidade ao sistema, porem, exige atenção na definição dos endereços.

81
Por exemplo, VB4 é a parte alta de VW4, assim sendo, um incremento de simples (somar mais um ao conteúdo) em VB4, implicará em um incremento 256 no valor de VW4.
 em VB4, implicará em um incremento 256 no valor de VW4.")
82
Outro ponto importante, Words consecutivas terão sempre um Byte em comum. De forma análoga Double Words compartilharão três Bytes.

83
M – São variáveis globais e podem ser usadas para armazenar status de registros pertencentes a lógica do programa ou tabela de dispositivos externos. São divididas em bytes.

84
T – Seu valor depende da operação do Timer a que está referenciada
T – Seu valor depende da operação do Timer a que está referenciada. Se utilizar esta variável em Funções que leiam o valor do Time, então um word é passado à Função. Se utilizar está variável em uma lógica Ladder, então um bit, indicando o estado do Timer, é passado ao Ladder. Exemplo: T4

85
C – Seu valor depende da operação do Contador a que está referenciada
C – Seu valor depende da operação do Contador a que está referenciada. Se utilizar esta variável em Funções que leiam o valor do Contador, então um word é passado à Função. Se utilizar está variável em uma lógica Ladder, então um bit, indicando o estado do Contador, é passado ao Ladder. Exemplo: C4

86
L – São similares as variáveis “V”, porem possuem o escopo local e podem ser usadas como memória de rascunho ou para passar parâmetros formais para sub-rotinas. São acessadas da forma de bit, byte, word ou double-word. Exemplo: L20.4 ou LW38

87
AC - Acumuladores são variáveis que podem ser usadas para passar parâmetros de uma subrotina e armazenar valores intermediários usados no cálculo. A CPU propicia 4 acumuladores de 32 bits (AC0, AC1, AC2 e AC3). Você pode acessar os dados dos acumuladores como bytes, words ou double words.
. Você pode acessar os dados dos acumuladores como bytes, words ou double words..")
88
HC – São variáveis que armazenam a contagem de eventos de contadores em alta velocidade, de forma independente do tempo de scan da CPU. São acessados por uma memória do tipo HC, podendo ser endereçados apenas como double word (32 bits).
..")
89
Tabela Completa

90
Tipo de Dado

91
Representação de constantes
As constantes podem ser passadas ao programa em vários sistemas de numeração, veja as possíveis representações: DECIMAL HEXADECIMAL – 16#4E4F BINÁRIO – 2#0100_1110_ 0100_1111 ASCII – ‘S’ STRING – “texto” REAL – 1.35E-23

92
Documentações Um projeto de Automação industrial envolve vários profissionais de áreas diferentes, Mecânicos, Eletricistas, Eletrônicos e Informáticos encabeçam a lista principal. Cada profissional tem a sua tarefa e com ela as normas as quais são submetidas, existem documentos para descrever cada segmento, um profissional poderá iniciar seu trabalho em função de outros dados já padronizados.

93
Um projeto de Automação Industrial está norteado pela ISA (Instrument Society of America) e essa instituição é responsável em emitir as normas. Documentos como Memorial Descritivo do Processo, Especificação de Material, Planta Elétrica, Planta de Drenagem, Planta de Ventilação, Fluxograma de Processo, Folha de Dados do Processo, Matriz de Causa e Efeito, Lista de Instrumentos, Fluxograma de Engenharia e Diagrama Lógico.

94
Para o desenvolvimento de um software de controle são basicamente necessários o Memorial Descritivo, Fluxograma de Engenharia, a Matriz de Causa e Efeito e o Diagrama Lógico.

95
Memorial Descritivo Deve conter a descrição do funcionamento da instalação, determinando a forma prevista de se fazer controle. Deve conter informações básicas que permitam a completa especificação de equipamentos e instrumentos.

96
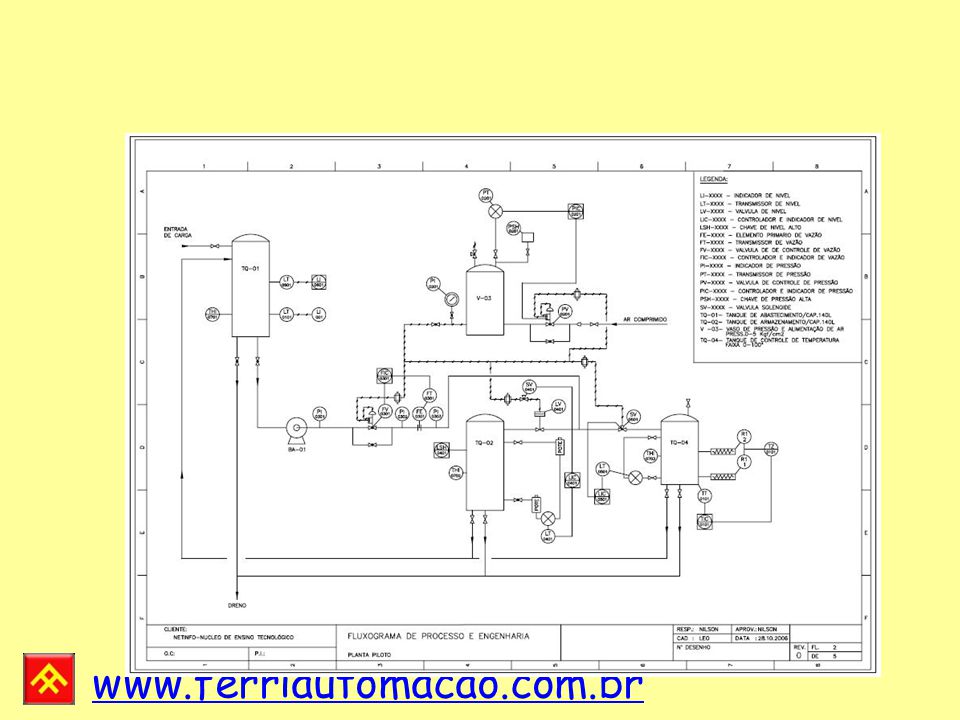
Fluxograma de Engenharia
Deve mostrar as malhas de controle, indicações de alarme e intertravamento, explicar a função do instrumento, sua identificação, localização e tipo de sinal de controle.

98
Matriz de Causa e Efeito
Mostra o inter-relacionamento entre os eventos anormais possíveis de ocorrer durante a operação normal da Planta ou de um equipamento em particular e as ações que devem ser tomadas pelo sistema de segurança, como também as seqüências automáticas de parada, partida ou manobras operacionais específicas. Este diagrama pode ser apresentado em uma forma matricial com as CAUSAS nas linha e o EFEITOS nas colunas. ou na forma de um texto descritivo.

99
No exemplo abaixo, o efeito “Output 1” será ativado caso qualquer uma das causas “Input 1", “Input 4" ou “Input 5" sejam acionadas. Já o efeito “Output 5” será ativado caso seja acionada a causa “Input 4”, ou então simultaneamente as causas “Input 6” e “Input 7”.

100
Diagrama Lógico Deve ser fundamentado nos memoriais descritivos com as filosofias adotadas para os sistemas de proteção intertravamento e sinalização alarme utilizando a “Álgebra de Boole” para sua execução. É uma implementação do diagrama de Causa x Efeito usando portas lógicas (“E”, “OU”, “FLIP-FLOP”,“TEMPORIZADORES”, etc.).
.")
101
Ex.: condição anormal nível 1 condição normal nível 0
Deve estabelecer claramente o critério da condição de parada de emergência e da condição normal de operação quanto ao nível lógico. Ex.: condição anormal nível 1 condição normal nível 0 Deve estabelecer o comportamento físico das entradas e saídas em relação às condições normais e anormais de operação. Ex.: Saída sem energia parada de emergência Contato de entrada aberto condição anormal. Estabelecer os níveis de parada de emergência. Ex.: nível 1 lógica triplicada nível 2 lógica duplicada nível 3 lógica simples

102
Simbologias NOT OR AND

103
Saída transita de 0 para 1 após tempo “t” quando a entrada transita de 0 para 1, se em “t” a entrada volta a 0, a saída também volta a 0. Saída transita de 1 para 0 após tempo “t” quando a entrada transita de 1 para 0.

104
PULSE OUTPUT Saída transita de 0 para 1 durante tempo “t” quando a entrada transita de 0 para 1. MEMÓRIA Quando a entrada B está em nível lógico 1, a saída C assume lógica 0 independente do estado da entrada A. Quando a entrada B está em nível lógico 0 e a entrada A assumi lógica 1, então a saída C assume nível lógico 1 mesmo que A volte ao estado 0 (memória). A saída D é o complemento da saída C e a entrada B tem precedência sobre A.
. A saída D é o complemento da saída C e a entrada B tem precedência sobre A.")
105
Lista de Entrada e Saída
Deve ser emitida por equipamento de controle (PLC, SDCD, etc) e deve conter, no mínimo, os seguintes campos: Tag Tipo - Entrada ou Saída - Analógica ou Digital - Alimentação - Contato NA ou NF - Estado em operação (energizado ou desernegizado) Endereço Físico
 e deve conter, no mínimo, os seguintes campos: Tag. Tipo. - Entrada ou Saída. - Analógica ou Digital. - Alimentação. - Contato NA ou NF. - Estado em operação (energizado ou desernegizado) Endereço Físico.")
106
Tratamento de Sinais Analógicos
Apesar do PLC ser um equipamento de processamento puramente digital, as variáveis de um processo nem sempre são. Pressão, temperatura e vazão, encabeçam a relação de variáveis mais utilizadas em um processo de automação. Essas grandezas por natureza são analógicas e cabe ao sistema a função de digitalizar.

107
Inicialmente um componente chamado sensor converte a grandeza em sinais elétricos, logo em seguida circuitos eletrônicos (transmissor) cuidam de normalizados em sinais padronizados. Existem dois tipos de padrões bem aceitos: 0 a 10V para sinais em Tensão e 4 a 20mA para sinais em corrente.

108
O valor elétrico representa na mesma proporção os limites mínimos e máximos da grandeza em questão. Por exemplo um sensor capaz de sentir um variação de temperatura de 0ºC a 250ºC terá para o 0ºC a corrente de 4mA ou a tensão 0V e para 250ºC a corrente de 20mA ou a tensão de 10V.

109
O resultado é acrescido do range mínimo, logo: 4 + 6,4 = 10,4mA
Uma temperatura intermediária pode ser encontrada matematicamente, por exemplo, qual seria a representação em corrente da temperatura de 100º? O SPAN da faixa de corrente é 20 – 4 = 16, já o da temperatura é 250, então: X X = 16x100/250 = 6,4 O resultado é acrescido do range mínimo, logo: 4 + 6,4 = 10,4mA

110
O sinal de corrente ou tensão é inserido no PLC através de um módulo A/D, pois este sinal deve ser convertido em binário antes de ser processado. Para cada entrada analógica existe um endereço de memória pré determinado que assume o valor binário correspondente ao sinal elétrico dentro do limite imposto pelo número de bits.

111
Um endereço de 16bits pode guardar números binários na faixa de 0 a No exemplo anterior o 0ºC seria o número 0 e o 250ºC o número e o 100ºC matematicamente: X 100 X = x 100 / 250 X = Em binário:

112
Representação Analógica Siemens (ET-1200)
Tensão e Corrente Simétrica - A faixa de a para tensão ou corrente simétrica é convertida em: • ± 10V • ± 20mA

113
Tensão e Corrente Assimétrica - A faixa de 0 a para tensão ou corrente assimétrica é convertida em: • 0 to 10V • 1 to 5V • 0 to 20mA • 4 to 20mA.

114
Blocos de Programa O Controlador Lógico Programável oferece vários tipos de blocos nos quais o programa do usuário e seus dados podem ser armazenados. Dependendo das necessidades do processo este programa pode estar estruturado em diferentes blocos.

115
Fluxo de Programa

116
Blocos Organizacionais (OB)
Blocos de organização (OBs) são a interface entre o sistema operacional da CPU e o programa do usuário. O OB1 representa e contem o programa cíclico e organiza o programa cíclico (pela chamada dos outros blocos).
 são a interface entre o sistema operacional da CPU e o programa do usuário. O OB1 representa e contem o programa cíclico e organiza o programa cíclico (pela chamada dos outros blocos).")
117
Funções (FC) Funções (Functions) são estruturas que representam um conjunto de operações ou instruções, permitem ao usuário separar seus programas em blocos. Com a utilização das funções os programas podem ser otimizados, reduzindo o número de linhas na programação do ladder.
 são estruturas que representam um conjunto de operações ou instruções, permitem ao usuário separar seus programas em blocos. Com a utilização das funções os programas podem ser otimizados, reduzindo o número de linhas na programação do ladder.")
118
As FCs possuem dois parâmetros (EN e ENO) que seguem as seguintes regras: •Se EN = 0, a função não é executado e ENO é também = 0. •Se EN=1, a função é executada e se ela é executada sem erros ENO é também = 1. Se um erro ocorre enquanto o bloco está sendo executado, ENO fica = 0.

119
Em LAD ou FBD diversas caixas FC podem ser agrupadas juntas uma após a outra e conectá-las logicamente com EN / ENO.

120
Funções de sistema (SFC)
São funções parametrizáveis integradas ao sistema operacional da CPU. Seu número e funcionalidade são fixos.

121
Bloco de Funções (FB) Diferentemente das funções (FCs), os blocos de funções (FBs) possuem uma memória. Isto significa que um bloco de dados local é associado ao bloco de funções, o denominado bloco de dados instance.
, os blocos de funções (FBs) possuem uma memória. Isto significa que um bloco de dados local é associado ao bloco de funções, o denominado bloco de dados instance.")
122
Um DB instance é usado para salvar variáveis estáticas
Um DB instance é usado para salvar variáveis estáticas. Estas variáveis locais somente podem ser usadas em FB, nesta tabela de declarações elas são declaradas. Quando o bloco deixa de ser executado, elas são salvas ou retidas pelo DB.

123
Quando você escreve um programa para um FC, você deve procurar por memórias bit vazias, áreas de endereços ou áreas de dados e você deve mantê-los por si próprios. As variáveis estáticas de um FB, por outro lado, são mantidas.

124
Quando você usa variáveis estáticas você evita o risco de atribuição duplicada de memórias bit, áreas de endereços ou áreas de dados.

125
Blocos de Funções de Sistema (SFB)
São funções parametrizáveis integradas ao sistema operacional da CPU. Seu número e funcionalidade são fixos. Maiores informações podem ser encontradas na Ajuda Online.

126
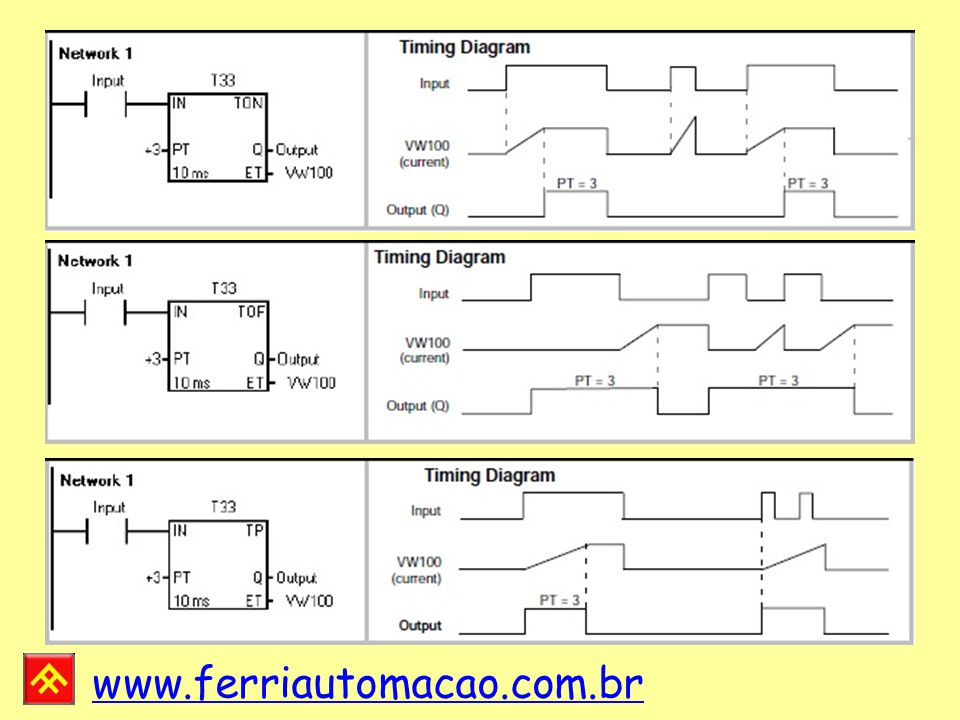
Temporização

128
Endereçamento dos Temporizadores

129
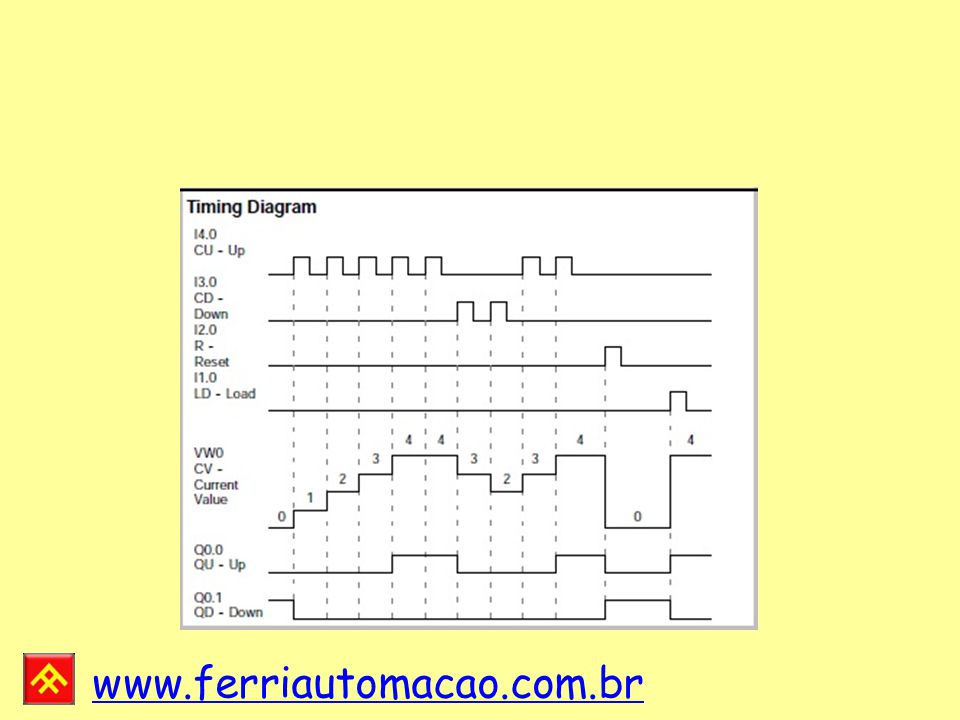
Contagem PV – Valor Pré-ajustado CV – Valor do Contador

131
Movimento de Dados A instrução MOVE transfere um valor de uma posição de memória para uma nova posição sem alterar o valor original.

132
Comparação Quando a entrada EN for habilitada, é feita a comparação das entradas IN1 e IN2, se o resultado for o “desejado”, a saída OUT será ligada, caso contrário será desligada.

133
Os valores nas entradas “IN1“ e “IN2“ são comparados conforme a condição especificada:
== IN1 é igual a IN2 (EQ) <> IN1 é diferente de IN2 (NE) > IN1 é maior que IN2 (GT) < IN1 é menor que IN2 (LT) >= IN1 é maior ou igual que IN2 (GE) <= IN1 é menor ou igual que IN2 (LE)
 <> IN1 é diferente de IN2 (NE) > IN1 é maior que IN2 (GT) < IN1 é menor que IN2 (LT) >= IN1 é maior ou igual que IN2 (GE) <= IN1 é menor ou igual que IN2 (LE)")
134
Matemáticas Básicas

135
Conversão Quando a entrada EN for habilitada, é feita a conversão do conteúdo de IN e colocado o valor na saída da função.

136
Biestável

137
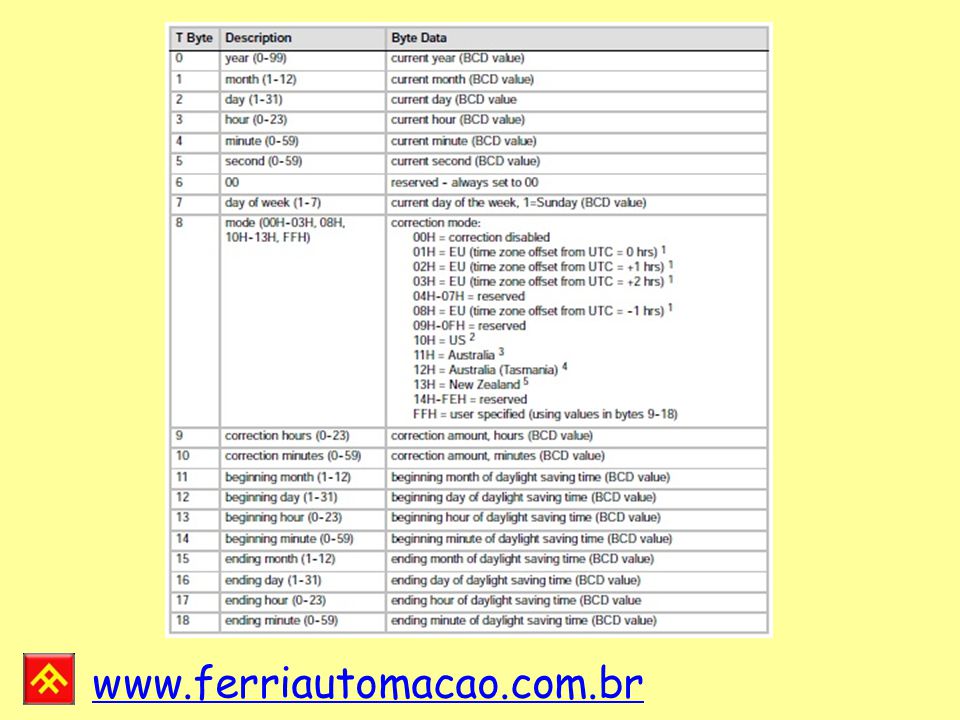
Read RTC e Set RTC

139
Sub-rotina A instrução de chamada de sub-rotina (CALL) transfere o controle para a sub-rotina SBR_N. Você pode usar uma chamada de sub-rotina com ou sem parâmetros. Após a sub-rotina terminar a sua execução (RET), o controle retorna para a instrução que chamou a sub-rotina.
 transfere o controle para a sub-rotina SBR_N. Você pode usar uma chamada de sub-rotina com ou sem parâmetros. Após a sub-rotina terminar a sua execução (RET), o controle retorna para a instrução que chamou a sub-rotina.")
140
Portal TIA

141
Modos de Operação da CPU
O modo de operação da CPU é definido pelo software: Modo RUN: programa rodando. Não existe possibilidade de transferência de um novo programa, nem a modificação do que está rodando.

142
Modo STOP: o programa em execução é interrompido para que se possa realizar alguma alteração.
Modo TERM: é possível alterar o programa com este rodando, porém, na hora de fazer o download do programa alterado, é necessário levar a CPU para STOP.

Apresentações semelhantes