Carregar apresentação
1
Departamento de Engenharia Mecânica da Universidade de Aveiro
“Desenvolvimento e Integração das Subestruturas Inferior e Superior para a Locomoção de uma Plataforma Humanóide” Autores: Nuno Beça n.º mec: 20075 Ângelo Cardoso n.º mec: 23570 Orientadores: Professor Vítor Santos Professor Filipe Silva Departamento de Engenharia Mecânica da Universidade de Aveiro Aveiro, 21 Julho de 2005

2
Objectivos: Validar a solução iniciada no projecto do ano anterior para a subestrutura inferior; Conceber e construir a subestrutura superior; Definir padrões de locomoção; Desenvolver uma aplicação de comando e monitorização.

3
Sumário: Motivações: Estrutura da plataforma: Análise estática:
Motivações de grandes empresas; Motivações do DEM da UA; Estrutura da plataforma: Requisitos na concepção; Trabalho desenvolvido: Validação da estrutura existente; Soluções para as limitações encontradas; Concepção da anca e da estrutura superior; Componentes utilizados. Análise estática: Binários necessários; Padrões de locomoção. Desenvolvimento de software de comando e monitorização; Integração com o projecto de controlo e percepção; Conclusão; Agradecimentos.

4
Motivos para a construção de um humanóide por grandes empresas:
Sonho de imitar o ser humano; Plataforma robótica de enorme versatilidade, que se pode adaptar a diversas tarefas; Indústria de entretenimento; Robótica de serviços (questões psicológicas).
.")
5
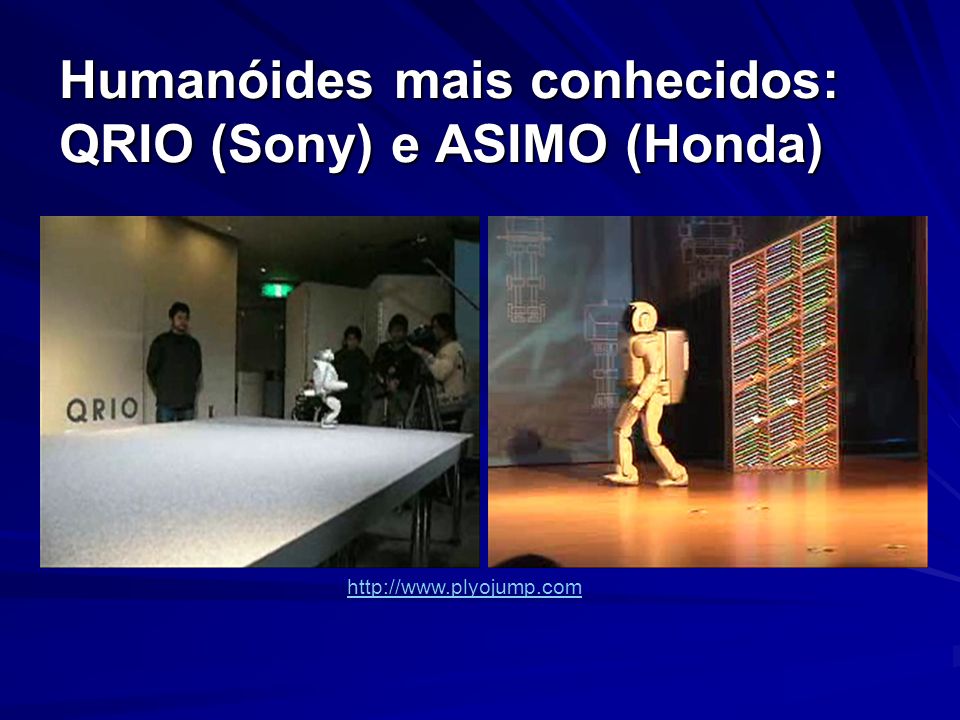
Humanóides mais conhecidos: QRIO (Sony) e ASIMO (Honda)
6
Motivos para a construção de um humanóide no DEM da UA:
Aplicar e desenvolver conhecimentos técnicos e de engenharia num projecto de elevada exigência; Construir uma plataforma para futuro trabalho de investigação; Desenvolver uma plataforma para participar no RoboCup, na classe KidSize de humanóides.

7
Requisitos gerais na concepção:
Possuir graus de liberdade (DOF) suficientes para locomoção versátil (jogar futebol na RoboCup!); Utilizar actuadores e baterias existentes no mercado (custo, dimensões, peso, binário, corrente, etc.); Permitir a afinação das transmissões; Respeitar as dimensões do RoboCup; Utilizar materiais leves mas resistentes. Aplicação Material Densidade (g/cm3) Resistência (MPa) Estrutura / Mecanismos Alumínio 2.7 545 – 600 Casquilhos Latão 8.9 610 Veios Aço 7.8 1270 – 1320 Ligações Nylon 1.4 90
 suficientes para locomoção versátil (jogar futebol na RoboCup!); Utilizar actuadores e baterias existentes no mercado (custo, dimensões, peso, binário, corrente, etc.); Permitir a afinação das transmissões; Respeitar as dimensões do RoboCup; Utilizar materiais leves mas resistentes. Aplicação. Material. Densidade (g/cm3) Resistência (MPa) Estrutura / Mecanismos. Alumínio – 600. Casquilhos. Latão Veios. Aço – Ligações. Nylon")
8
Evolução do trabalho desenvolvido:
Validação da perna construída no projecto do ano anterior.

9
Limitações encontradas:
Necessidade de garantir o entre-eixo de pé ao lado:

10
Limitações encontradas:
Necessidade de transmitir o movimento do motor do joelho para a estrutura da coxa:

11
Modelação completa em CATIA das duas pernas:

12
Estudo e concepção de soluções para a anca:
A anca dever ter três graus de liberdade necessários, num espaço reduzido.

13
Ligação à anca:

14
Distância entre pernas:
A distância entre pernas: 120 mm 170 mm

15
Solução final da anca:

16
Alteração da estrutura de nylon para alumínio:
Necessidade de garantir entre-eixo do tornozelo à frente, do joelho e da anca à frente; Necessidade de uma estrutura rígida. Pouco aumento de peso! O peso seria igual se a chapa tivesse 1.5mm

17
Montagem das pernas existentes:

18
Soluções encontradas para o tronco e braços:
Considerações importantes a ter em conta: - ter espaço para a unidade de controlo, baterias, placas, etc.; - ser leve e resistente; - ter mobilidade para facilitar a locomoção; - ser esteticamente aceitável; - ter altura de modo a estar dentro das regras da classe KidSize da RoboCup.

19
Soluções encontradas para o tronco:
1º Solução: Vantagens: - ser de fácil concepção; - ficar com dimensões reduzidas. Desvantagem: - ter apenas um grau de liberdade, o que não ajudaria à locomoção.

20
Soluções encontradas para o tronco:
2º Solução: final Vantagens: ajudar na locomoção; permitir “olhar” para o chão. Desvantagens: - ficar com dimensões maiores; - não ser de muito fácil concepção; - aumentar o peso.

21
Solução final para os braços:
Dois graus de liberdade no ombro, junta universal (RR) e uma junta rotacional simples (R) no cotovelo.
 e uma junta rotacional simples (R) no cotovelo.")
22
Troca da transmissão de rodas dentadas para transmissão por correia:
Necessidade de eliminar a folga existente na transmissão por rodas dentadas; Maior facilidade de posicionamento dos motores.

23
Solução para as polias de 16 dentes:
Necessidade de transmitir o movimento do veio do motor para a polia.

24
Análise estática: binários e centros de massa
Posição central Inclina ao lado Levanta pé livre Leva pé livre à frente do de apoio Apoia pé livre no chão Inclina ao lado oposto Leva pé livre ao lado do de apoio Inclina ao centro (posição central) Motor / Junta Binário Máximo nesta simulação (N.m) Tornozelo – lado 2.37 Tornozelo – frente 0.30 Joelho 1.17 Anca – frente 0.35 Anca – lado 2.57 Próximo passo Parar
 Motor / Junta. Binário Máximo nesta simulação (N.m) Tornozelo – lado Tornozelo – frente Joelho Anca – frente Anca – lado Próximo passo. Parar.")
25
Actuadores e baterias:
HITEC Modelo Massa (g) Binário (N.m) Motor Pequeno HS85BB 19.8 0.35 Motor Médio HS715BB 110 1.08 Motor Grande HS805BB 152 2.26 Li-Ion Cells Valor Modelo 4LI – 2400 Tensão (V) 7.2 Capacidade (mAh) 4800 Corrente max. Sustentada (A) 9.6 Dimensões (mm) 37 x 37 x 65 Peso (g) 176 Necessidade de razões de transmissão superior a 2, para garantir coeficiente de segurança!!
 Binário (N.m) Motor Pequeno. HS85BB Motor Médio. HS715BB Motor Grande. HS805BB Li-Ion Cells. Valor. Modelo. 4LI – Tensão (V) 7.2. Capacidade (mAh) Corrente max. Sustentada (A) 9.6. Dimensões (mm) 37 x 37 x 65. Peso (g) 176. Necessidade de razões de transmissão superior a 2, para garantir coeficiente de segurança!!")
26
Desenvolvimento de uma aplicação de comando e monitorização:
A aplicação desenvolvida em MatLab tem como funcionalidades: Saber se as placas de controlo estão bem ligadas, via porta série; Enviar os ângulos pretendidos para os motores; Ler a posição dos motores (potenciómetros).
.")
27
Integração com o projecto de controlo e percepção:
Limitações encontradas: idealização da locomoção; robustez das correias de transmissão; rudimentaridade dos esticadores; design.

28
Plataforma construída:
Graus de Liberdade Pescoço 2 Braços 3 (2x) Tronco Pernas 6 (2x) Altura (mm) 600 Largura (mm) 250 Peso (kg) 6,219 Actuadores 22 Servos (14 Grande, 8 Pequenos)
 Tronco. Pernas. 6 (2x) Altura (mm) 600. Largura (mm) 250. Peso (kg) 6,219. Actuadores. 22 Servos. (14 Grande, 8 Pequenos)")
29
Resultados: Participação no encontro científico do Robótica 2005;
Concepção, modelação e construção de uma plataforma humanóide; Desenvolvimento de software para determinação de centro de massa (estático) e padrões de locomoção; Desenvolvimento de software para comando do robot em malha aberta e leitura de potenciómetros.
 e padrões de locomoção; Desenvolvimento de software para comando do robot em malha aberta e leitura de potenciómetros.")
30
Conclusões: A locomoção deve ser feita com os joelhos flectidos, para assim aumentar a estabilidade; De modo a garantir precisão da posição pretendida, será necessário utilizar um controlo em malha fechada; O material dos elos (liga de alumínio comercial) assegura uma boa rigidez do sistema sem grande aumento de peso; Face à autonomia pretendida para a plataforma e aos custos associados, as baterias 4LI-2400 afiguraram ser as mais vantajosas; Apesar dos motores terem binário suficiente, não é fácil garantir a posição pretendida.
 assegura uma boa rigidez do sistema sem grande aumento de peso; Face à autonomia pretendida para a plataforma e aos custos associados, as baterias 4LI-2400 afiguraram ser as mais vantajosas; Apesar dos motores terem binário suficiente, não é fácil garantir a posição pretendida.")
31
Objectivos: Validar a solução iniciada no projecto do ano anterior para a subestrutura inferior; Conceber e construir a subestrutura superior; Definir padrões de locomoção; Desenvolver uma aplicação de comando e monitorização.

32
Agradecimentos: aos nossos orientadores, Prof. Vítor Santos e Prof. Filipe Silva; ao Eng. Festas; ao Departamento de Física, que sempre disponibilizou os meios que lhes solicitámos; aos nossos colegas que começaram o trabalho no ano anterior, Luís Rêgo e Renato Barbosa; ao Eng. Camilo Christo; aos colegas que nos acompanharam e ajudaram ao longo deste ano, em especial, ao Mauro Silva e ao Luís Gomes.

33
Departamento de Engenharia Mecânica da Universidade de Aveiro
“Desenvolvimento e Integração das Subestruturas Inferior e Superior para a Locomoção de uma Plataforma Humanóide” Autores: Nuno Beça n.º mec: 20075 Ângelo Cardoso n.º mec: 23570 Orientadores: Professor Vítor Santos Professor Filipe Silva Departamento de Engenharia Mecânica da Universidade de Aveiro Aveiro, 21 Julho de 2005






>")














