Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Rogério Ishibashi Orientador: Cairo L. Nascimento Jr.
Extração de Conhecimentos com Interpretabilidade Aumentada Utilizando Modelagem Fuzzy e Otimização Multi-objetivo Rogério Ishibashi Orientador: Cairo L. Nascimento Jr. Instituto Tecnológico de Aeronáutica 16/Dez/2013

2
Roteiro 1. Introdução 2. Revisão Bibliográfica
3. Proposta de Solução: MoGFT-I 4. Estudos de Caso: 4.1 Estimação do tempo de vida de um motor aeronáutico 4.2 Reconhecimento de imagens binárias 7x7 com ruído 4.3 Controle do carro com pêndulo invertido 5. Conclusões finais

3
1. Introdução Grande quantidade de dados armazenados.
Necessidade de programas computacionais para a extração de conhecimentos. Técnicas comuns utilizadas: modelos fuzzy, redes neurais, árvores de decisão, etc. Preocupação na otimização da acurácia e não na interpretação dos modelos.

4
1. Introdução: Motivação
Na definição de regras de forma manual a responsabilidade recai sobre os especialistas. Depende de especialistas experientes que podem ter dificuldade para modelar sistemas complexos. Automatizar a extração de conhecimentos em bases de dados. Gerar modelos com boa precisão e interpretáveis para auxiliar um especialista em sua tomada de decisão. Vantagens de modelos interpretáveis: verificação do conhecimento extraído, aumento da confiança do usuário no modelo.

5
1. Introdução: Objetivo Árvores de Decisão Lógica Fuzzy
Mecanismo Automático Geração de Regras Fuzzy e Calibração de Funções de Pertinência Algoritmos Genéticos Otimização multi-objetivo Acurácia Interpretabilidade Interpretabilidade

6
Roteiro 1. Introdução 2. Revisão Bibliográfica
3. Proposta de Solução: MoGFT-I 4. Estudos de Caso 4.1 Estimação do tempo de vida de um motor aeronáutico 4.2 Reconhecimento de imagens binárias 7x7 com ruído 4.3 Controle do carro com pêndulo invertido 5. Conclusões finais

7
2.1 Revisão: Árvores de Decisão (AD)
Representação de conhecimento através de uma estrutura em forma de árvore que descreve decisões. - Nó-folha: conclusão. - “dividir para conquistar”; - Particionamento: Ex: Information Gain; - Critérios de poda: Ex: Reduced Error Pruning; - Exemplos: CART, ID3 and C4.5. - Vantagens: autoexplicativas, aprendizado fácil - Desvantagens: pouco tolerante a dados ruidosos, instabilidade, pode exigir muitas regras

8
2.2 Revisão: Lógica Fuzzy Variável pode assumir infinitos valores entre 0 e 1. Tratamento de incertezas e imprecisões. Dois métodos principais: Mamdani e Sugeno. Temperatura discreta. Temperatura fuzzy: Variáveis linguísticas, Funções de pertinência, Grau de pertinência; - Variáveis linguísticas na entrada/saída. - Vantagens: tolerante a dados ruidosos, trabalha com variáveis linguísticas, tratamento de incertezas e imprecisões, interpretabilidade - Desvantagens: dificuldade de estabelecer regras manualmente, aprendizado, necessita mais simulação e testes

9
2.3 Revisão: Algoritmos Genéticos
Algoritmos de propósito geral que usam os princípios da evolução natural para buscar soluções aproximadas. Problema é codificado em um cromossomo composto por genes - Vantagens: capacidade de busca global, independência de domínio, natureza paralela - Desvantagens: resultados sub-ótimos, tempo de processamento

10
2.4 Revisão: Sistema Fuzzy Gen. Baseado em Regras
Sistema Fuzzy Baseado em Regras apoiado por um processo de aprendizagem genético. RF: Regra Fuzzy, FP: Função de Pertinência - Vantagens: capacidade de aprendizado, todas as vantagens dos sistemas fuzzy - Desvantagens: todas as desvantagens dos algoritmos genéticos

11
2.5 Revisão: Otimização multi-objetivo
Múltiplos objetivos conflitantes são avaliados independentemente através do conceito de dominância. Fronteira de Pareto. NSGA-II (Deb, 2001). x1 domina x2 se e somente se:
. x1 domina x2 se e somente se:")
12
2.6 Revisão: Interpretabilidade em Sistemas Fuzzy
Permite a representação do conhecimento de forma similar aos conceitos compreendidos por seres humanos (Cannone et al., 2009). Interpretabilidade e acurácia geralmente são conflitantes. Ex: redes neurais. Um modelo fuzzy interpretável é um modelo fácil de ser compreendido, explicado ou descrito por uma pessoa, relacionando o modelo ao seu domínio de conhecimento. - Acurácia e Interpretabilidade são objetivos contraditórios; - Exemplo de contradição: redes neurais artificiais.
. Interpretabilidade e acurácia geralmente são conflitantes. Ex: redes neurais. Um modelo fuzzy interpretável é um modelo fácil de ser compreendido, explicado ou descrito por uma pessoa, relacionando o modelo ao seu domínio de conhecimento. - Acurácia e Interpretabilidade são objetivos contraditórios; - Exemplo de contradição: redes neurais artificiais.")
13
2.6 Revisão: Interpretabilidade em Sistemas Fuzzy
Condições para interpretabilidade: utilização de funções de pertinência (FP) que façam sentido, número de regras reduzido, utilização de regras compactas, com poucas variáveis. Como medir interpretabilidade? características de alto nível: nº de regras, nº de atributos e nº de FP, características de baixo nível: formato, sobreposição e cobertura das FP. - Baixo nível: relacionado à semântica, formato, sobreposição, cobertura, etc - verificar de maneira fácil e confiável o conhecimento extraído (relacionando isso ao domínio de conhecimento humano)
 que façam sentido, número de regras reduzido, utilização de regras compactas, com poucas variáveis. Como medir interpretabilidade características de alto nível: nº de regras, nº de atributos e nº de FP, características de baixo nível: formato, sobreposição e cobertura das FP. - Baixo nível: relacionado à semântica, formato, sobreposição, cobertura, etc. - verificar de maneira fácil e confiável o conhecimento extraído (relacionando isso ao domínio de conhecimento humano)")
14
2.6 Revisão: Interpretabilidade em Sistemas Fuzzy
- Tarefa subjetiva; - Depende da experiência e preferências;

15
Roteiro 1. Introdução 2. Revisão Bibliográfica
3. Proposta de Solução: MoGFT-I 4. Estudos de Caso 4.1 Estimação do tempo de vida de um motor aeronáutico 4.2 Reconhecimento de imagens binárias 7x7 com ruído 4.3 Controle do carro com pêndulo invertido 5. Conclusões finais

16
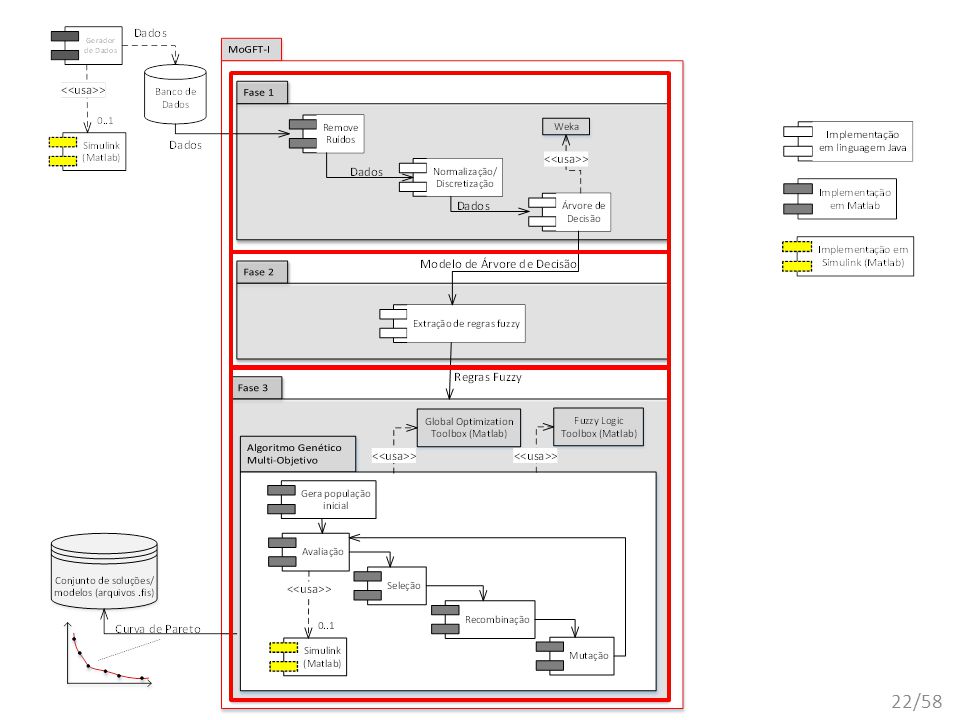
3. Proposta de Solução: MoGFT-I
MoGFT-I: Multi-objective GFRBS supported by a Decision Tree with improved Interpretability. Dois módulos principais e independentes: Geração de regras, Ajustes nas funções de pertinência. Divididos em 3 fases.

17
3. Proposta de Solução: MoGFT-I

18
3. Proposta de Solução: MoGFT-I
Fase 1: Geração da Árvore de Decisão. Fase 2: Extração das regras fuzzy. A árvore pode ser podada Variáveis são normalizadas e discretizadas

19
3. Proposta de Solução: MoGFT-I
Fase 3: Algoritmo genético multi-objetivo para os ajustes das funções de pertinência. Função Objetivo 1: Minimizar a complexidade através do cálculo das penalidades das funções de pertinência. Função Objetivo 2: Minimizar erros de aproximação - Depende da aplicação (estudo de caso). - As regras fuzzy não são modeladas no cromossomo
. - As regras fuzzy não são modeladas no cromossomo.")
20
3. Proposta de Solução: MoGFT-I

21
3. Proposta de Solução: MoGFT-I
Avaliação + seleção + recombinação + mutação.

23
Roteiro 1. Introdução 2. Revisão Bibliográfica
3. Proposta de Solução: MoGFT-I 4. Estudos de Caso 4.1 Estimação do tempo de vida de um motor aeronáutico 4.2 Reconhecimento de imagens binárias 7x7 com ruído 4.3 Controle do carro com pêndulo invertido 5. Conclusões finais

24
4.1 Estudo de Caso 1: PHM PHM: Prognostic and Health Management.
Permite que a confiabilidade de um sistema seja avaliada durante seu ciclo de vida através da predição de seu tempo de vida (RUL – Remaining Useful Life). Benefícios: mitigar os riscos de falha do equipamento, otimizar o planejamento logístico de manutenção, aumentar a segurança operacional de aeronaves. Outros autores utilizam redes neurais
. Benefícios: mitigar os riscos de falha do equipamento, otimizar o planejamento logístico de manutenção, aumentar a segurança operacional de aeronaves. Outros autores utilizam redes neurais.")
25
4.1 Estudo de Caso 1: PHM - 100 séries temporais contendo dados de 21 sensores de motores aeronáuticos turbo-hélice - 80/20 14 atributos selecionados no passo 3 Regressão linear com mínimos quadrados e polinômio de primeira ordem (smooth)
")
26
4.1 Estudo de Caso 1: PHM Função objetivo 1: Minimizar a complexidade através do cálculo das penalidades. Função objetivo 2: Minimizar os erros de aproximação (aumentar a acurácia): 10 Regras geradas pelo algoritmo de árvore de decisão C4.5 com confidence factor 10-4. - Atributos são normalizados e discretizados - RUL é calculado com valor de defuzzificação - 100 indivíduos, 1000 gerações, 80% recombinação, 40% mutação
: 10 Regras geradas pelo algoritmo de árvore de decisão C4.5 com confidence factor Atributos são normalizados e discretizados. - RUL é calculado com valor de defuzzificação indivíduos, 1000 gerações, 80% recombinação, 40% mutação.")
27
4.1 Estudo de Caso 1: PHM Final da execução do Algoritmo Genético Multi-objetivo.

28
4.1 Estudo de Caso 1: PHM

29
4.1 Estudo de Caso 1: PHM Exemplo de resultado da aplicação de um dos modelos gerados para os dados de teste.

30
4.1 Estudo de Caso 1: PHM Curvas de Pareto geradas com diferentes configurações de poda.

31
Roteiro 1. Introdução 2. Revisão Bibliográfica
3. Proposta de Solução: MoGFT-I 4. Estudos de Caso 4.1 Estimação do tempo de vida de um motor aeronáutico 4.2 Reconhecimento de imagens binárias 7x7 com ruído 4.3 Controle do carro com pêndulo invertido 5. Conclusões finais

32
4.2 Estudo de Caso 2: Reconhecimento de imagens
- Foi gerado um modelo para cada padrão de imagem; - Modelo fuzzy com saída discretizada

33
4.2 Estudo de Caso 2: Reconhecimento de imagens
Quantidade de regras geradas pelo algoritmo C4.5 para diferentes configurações de poda.

34
4.2 Estudo de Caso 2: Reconhecimento de imagens
Função objetivo 1: minimizar a complexidade através dos cálculos das penalidades. Função objetivo 2: minimizar os erros de aproximação. - 300 individuos, 2000 gerações, 80% recombinação, 80% mutação

35
4.2 Estudo de Caso 2: Reconhecimento de imagens
Final da execução do algoritmo genético multi-objetivo. Caracter ‘2’ Sem poda 19 Regras 9 soluções

36
4.2 Estudo de Caso 2: Reconhecimento de imagens
Combinação de classificadores:

37
4.2 Estudo de Caso 2: Reconhecimento de imagens
Curvas de Pareto geradas para a combinação de classificadores.

38
4.2 Estudo de Caso 2: Reconhecimento de imagens
Imagens com 8% de ruídos. Imagens com 10% de ruídos.

39
4.2 Estudo de Caso 2: Reconhecimento de imagens
Testes com diferentes níveis de ruído em 5% e 8%.

40
4.2 Estudo de Caso 2: Reconhecimento de imagens
Média e desvio padrão das penalidades das 16 soluções. Distribuição das penalidades das 16 soluções.

41
Roteiro 1. Introdução 2. Revisão Bibliográfica
3. Proposta de Solução: MoGFT-I 4. Estudos de Caso 4.1 Estimação do tempo de vida de um motor aeronáutico 4.2 Reconhecimento de imagens binárias 7x7 com ruído 4.3 Controle do carro com pêndulo invertido 5. Conclusões finais

42
4.3 Estudo de Caso 3: Controle
Controle do carro com pêndulo invertido. Problema não linear. Planta instável. Desafio é manter o pêndulo equilibrado na posição vertical e deslocar o carro para a origem.

43
4.3 Estudo de Caso 3: Controle
Ângulo do pêndulo ( ). Velocidade angular do pêndulo ( ). Posição do carro ( ). Velocidade do carro ( ). Massa do carro (M): 1,0 kg. Massa do pêndulo (m): 0,1 kg. Comprimento do pêndulo (2l): 1,0 m. Gravidade (g): 9,8 m/s2.
. Velocidade angular do pêndulo ( ). Posição do carro ( ). Velocidade do carro ( ). Massa do carro (M): 1,0 kg. Massa do pêndulo (m): 0,1 kg. Comprimento do pêndulo (2l): 1,0 m. Gravidade (g): 9,8 m/s2.")
44
4.3 Estudo de Caso 3: Controle
Dado um controlador qualquer ja existente para o pêndulo, deseja-se utilizá-lo como suporte ao aprendizado do método MoGFT-I. Pode ser um controlador humano

45
4.3 Estudo de Caso 3: Controle
Problema de regulação. Dados de treinamento gerados pelo controlador do Simulink/Matlab.

46
4.3 Estudo de Caso 3: Controle
Fase 1: variáveis de entrada e de saída normalizadas e discretizadas em negative, medium, positive. Regras geradas pelo algoritmo de AD C4.5:

47
4.3 Estudo de Caso 3: Controle
Equações para o cálculo dos erros de aproximação. ,

48
4.3 Estudo de Caso 3: Controle
Final da execução do algoritmo genético multi-objetivo.

49
4.3 Estudo de Caso 3: Controle
Solução com 0 penalidades Solução com 2 penalidades

50
4.3 Estudo de Caso 3: Controle
Simulação com estado inicial em = (0o; 0o/s; 1,0 m; 0 m/s). Solução com 0 penalidades Solução com 2 penalidades
. Solução com 0 penalidades. Solução com 2 penalidades.")
51
4.3 Estudo de Caso 3: Controle
Simulação com estado inicial em = (0o; 0o/s; 0,2 m; 0 m/s).
.")
52
4.3 Estudo de Caso 3: Controle
Diagrama de fases com estado inicial em: = (0o; 0o/s; 1,0 m; 0 m/s).
.")
53
4.3 Estudo de Caso 3: Controle
Simulação com estado inicial em = (0o; 0o/s; 1,0 m; 0 m/s).
.")
54
Roteiro 1. Introdução 2. Revisão Bibliográfica
3. Proposta de Solução: MoGFT-I 4. Estudos de Caso 4.1 Estimação do tempo de vida de um motor aeronáutico 4.2 Reconhecimento de imagens binárias 7x7 com ruído 4.3 Controle do carro com pêndulo invertido 5. Conclusões finais

55
5. Conclusões finais: Principais Contribuições
Concepção do método MoGFT-I. Método com módulos independentes. Utilização de algoritmo multi-objetivo para otimização da acurácia e da interpretabilidade. Análise através das curvas de Pareto. Aplicação em problemas relevantes. MoGFT-I realiza aprendizado das regras e calibração das funções de pertinência de forma automática. Fornece um conjunto de soluções ao especialista com diferentes tradeoffs

56
5. Conclusões finais: Principais Contribuições
Publicações geradas até o momento: Knowledge extraction using a genetic fuzzy rule-based system with increased interpretability. IEEE International Symposium on Applied Machine Intelligence and Informatics, Herl’any, Slovakia, 2012 (IEEE SAMI 2012). GFRBS-PHM: A genetic fuzzy rule-based system for PHM with improved Interpretability. IEEE International Conference on Prognostics and Health Management, Gaithersburg, USA, 2013 (IEEE PHM 2013).
. GFRBS-PHM: A genetic fuzzy rule-based system for PHM with improved Interpretability. IEEE International Conference on Prognostics and Health Management, Gaithersburg, USA, 2013 (IEEE PHM 2013).")
57
5. Conclusões finais: Considerações Finais
Os resultados obtidos cumpriram com o objetivo proposto. Foi mostrado a relevância da otimização multi-objetivo para avaliar funções conflitantes. As capacidades do método MoGFT-I puderam ser demonstradas em diferentes áreas. Finalmente, espera-se que esta pesquisa possa servir de inspiração para futuros trabalhos.

58
Fim Obrigado a todos.

Apresentações semelhantes