Carregar apresentação
A apresentação está carregando. Por favor, espere

1
professor Victory Fernandes www.tkssoftware.com/victory
Arduino e Proteus Acionando cargas DC e AC professor Victory Fernandes

2
ARDUINO E PROTEUS Eletrônica Arduino + Proteus Relés ULN2003 e ULN2803
Ligação da saída em Normal Aberto – NA Ligação da saída em Normal Fechado – NF Ponte-H com relés Ponte-H com transistores Corte/Saturação Ponte-H com L293 e L298 Arduino + Proteus Projeto de portão eletrônico Projeto de sumô de robôs

3
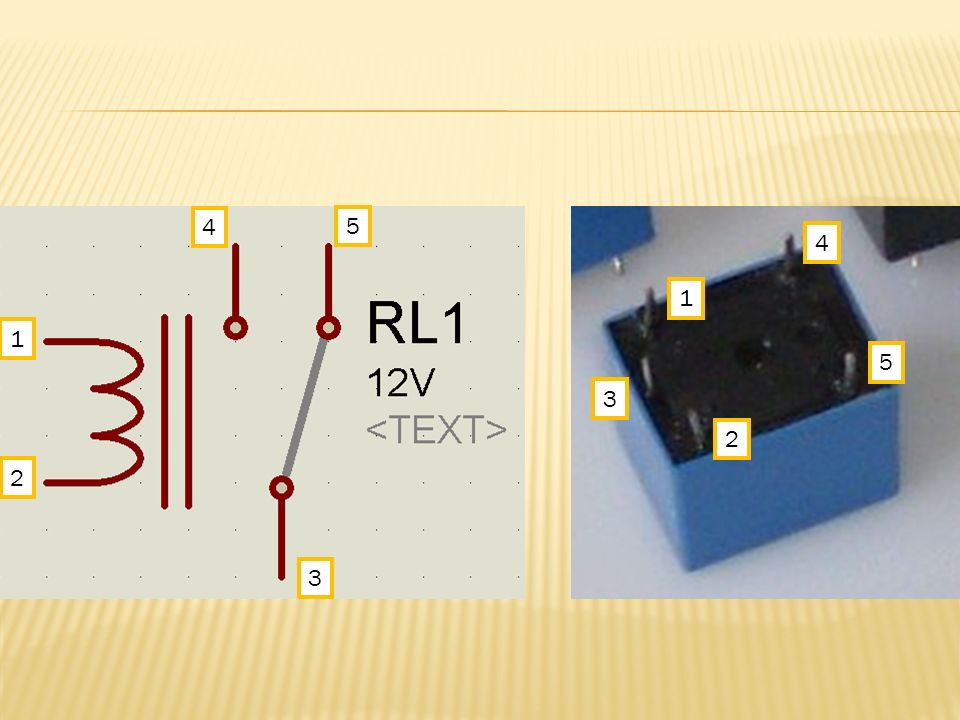
relés

4
relés Comutador eletro-mecânico (em sua maioria)
Permite acionamento on/off de circuitos Isola eletricamente dois circuitos

5
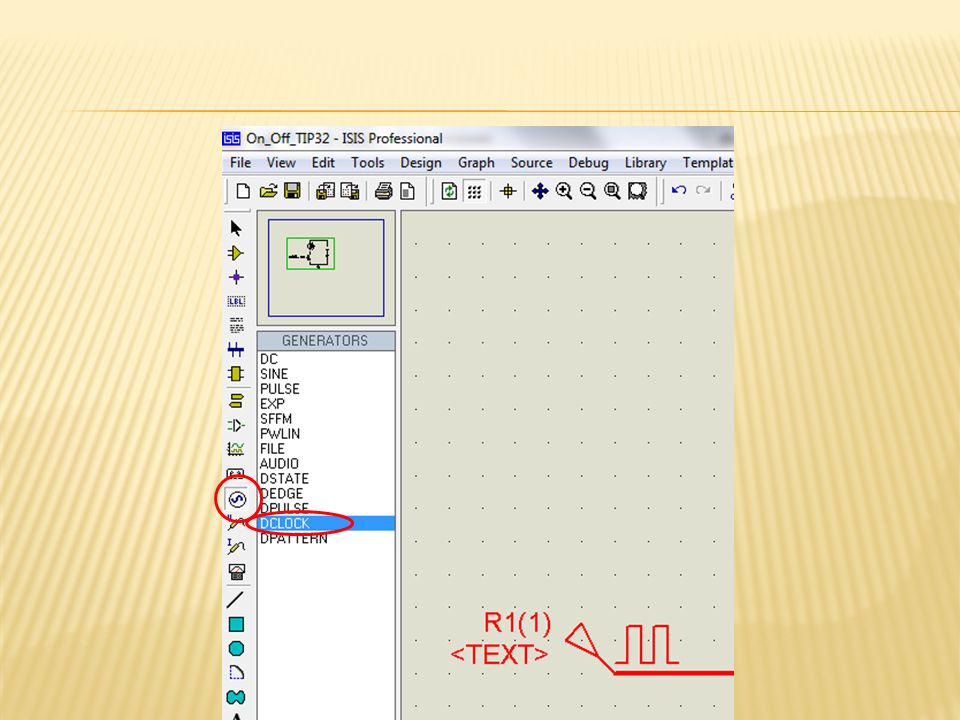
No Proteus

6
4 5 4 1 1 5 3 2 2 3
9
Ligação direto na porta?

10
ULN2003 ou ULN2803 Tensão até 12Vdc e correntes até 500mA

11
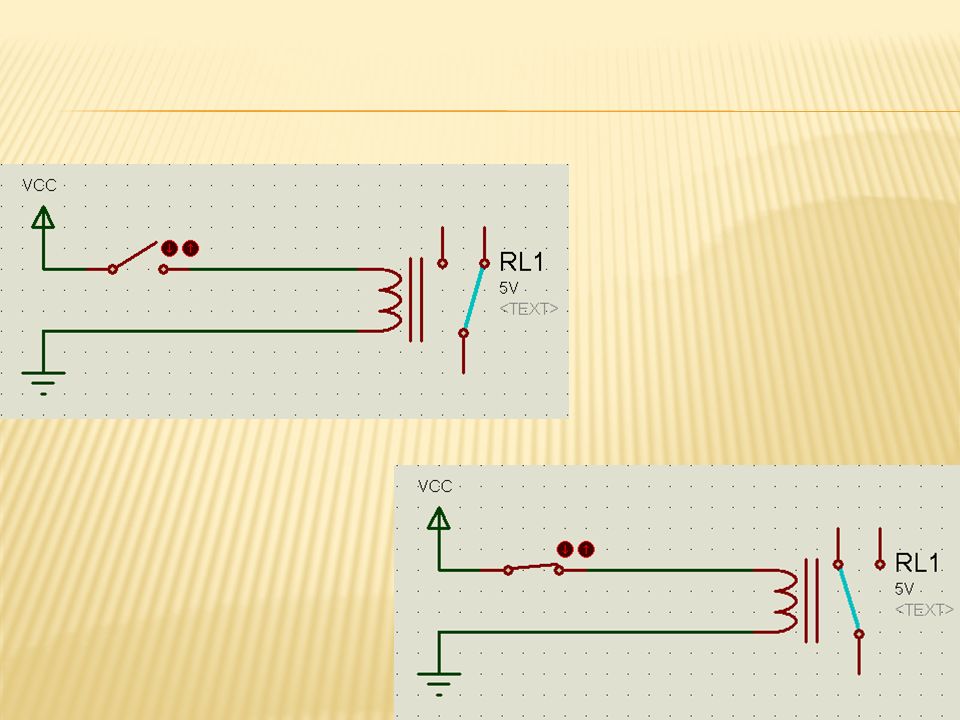
LIGAção em Normal Aberto - NA
0 = Circuito Aberto; 1 = Circuito Fechado;

12
LIGAção em Normal FECHADO - NF
0 = Circuito Fechado; 1 = Circuito Aberto;

13
Tutoriais

14
EXEMPLO BLINK

15
Simulação anterior

16
Simulação com ULN2003 e relé

17
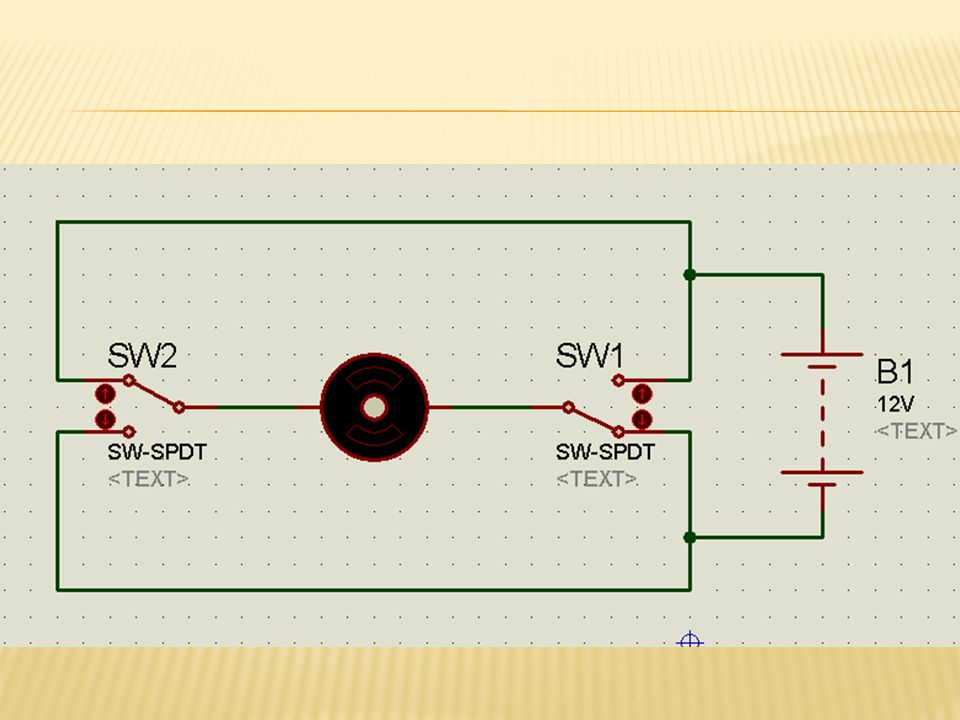
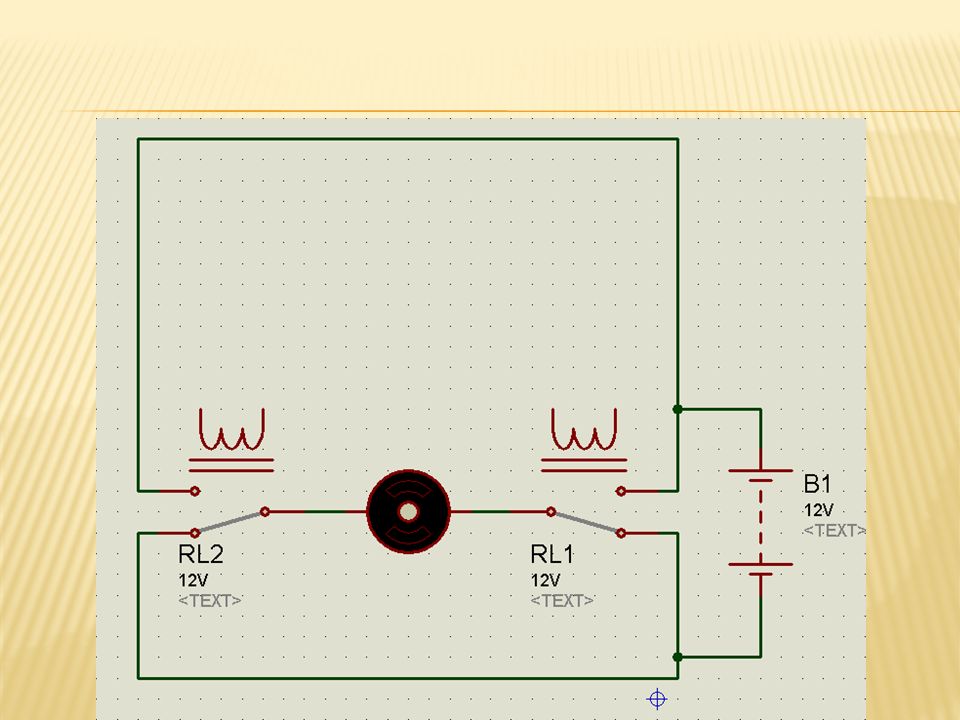
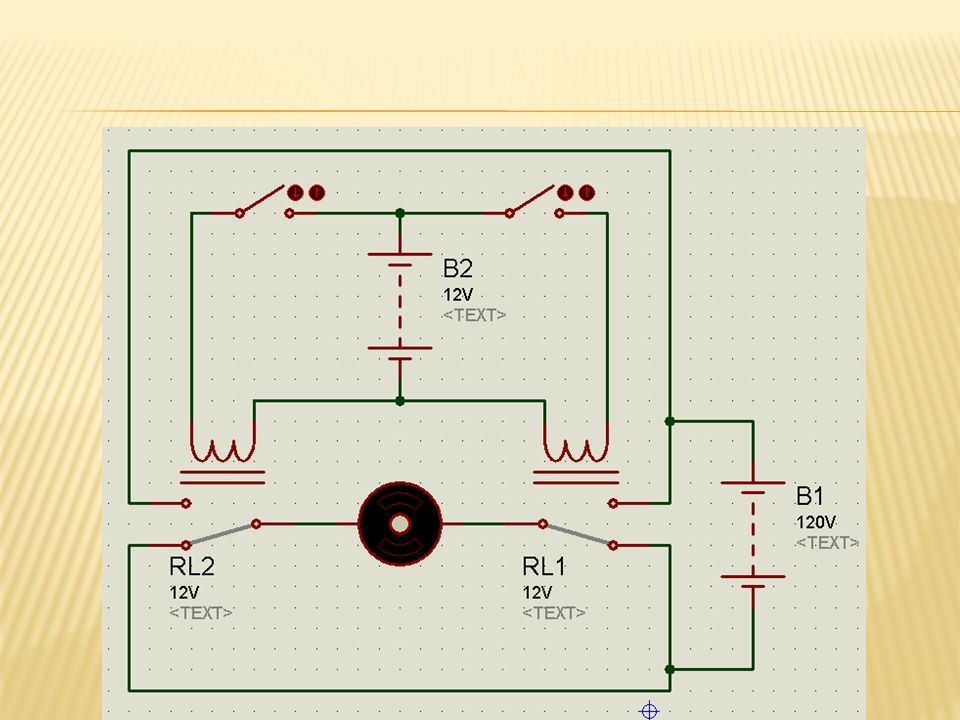
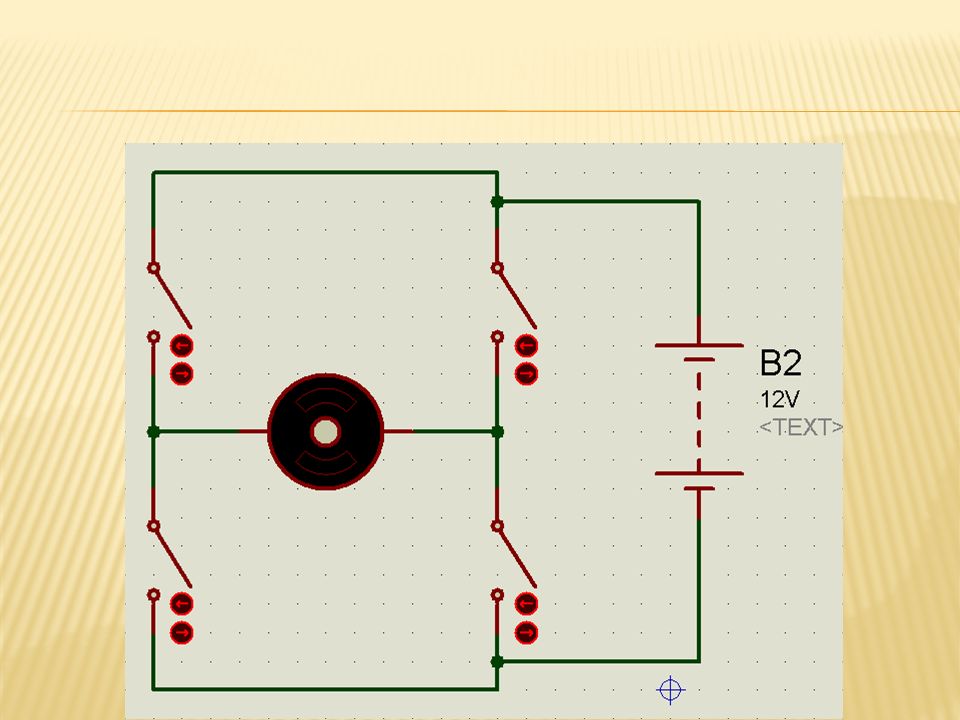
PONTE H com relés

18
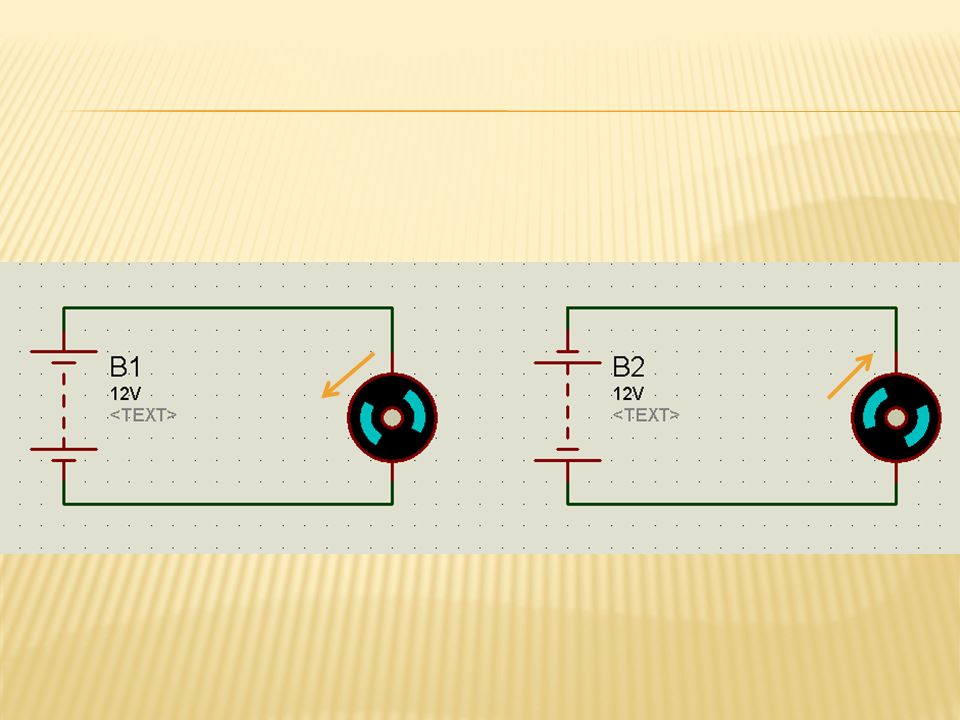
PONTE-H com relés Simples montagem Permite inversão de polaridade
Utilizado para acionamento de motores DC em dois sentidos Como acionamento é eletro-mecânico não suporta comutação em altas taxas, logo não é apropriado para controle PWM (Pulse Width Modulation – Modulação por Largura de Pulso)
")
24
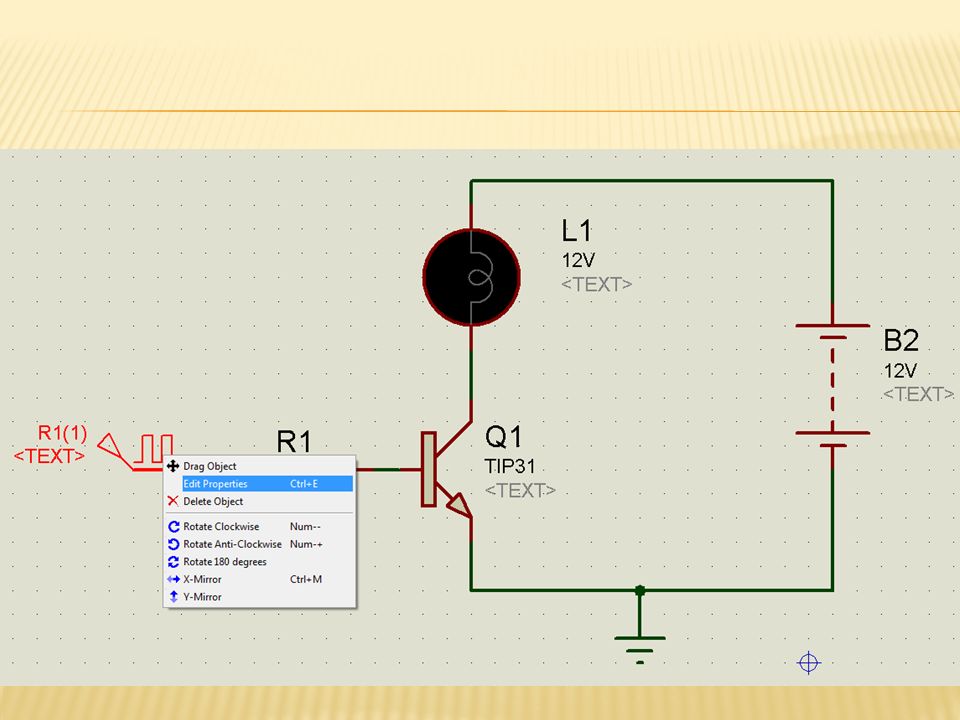
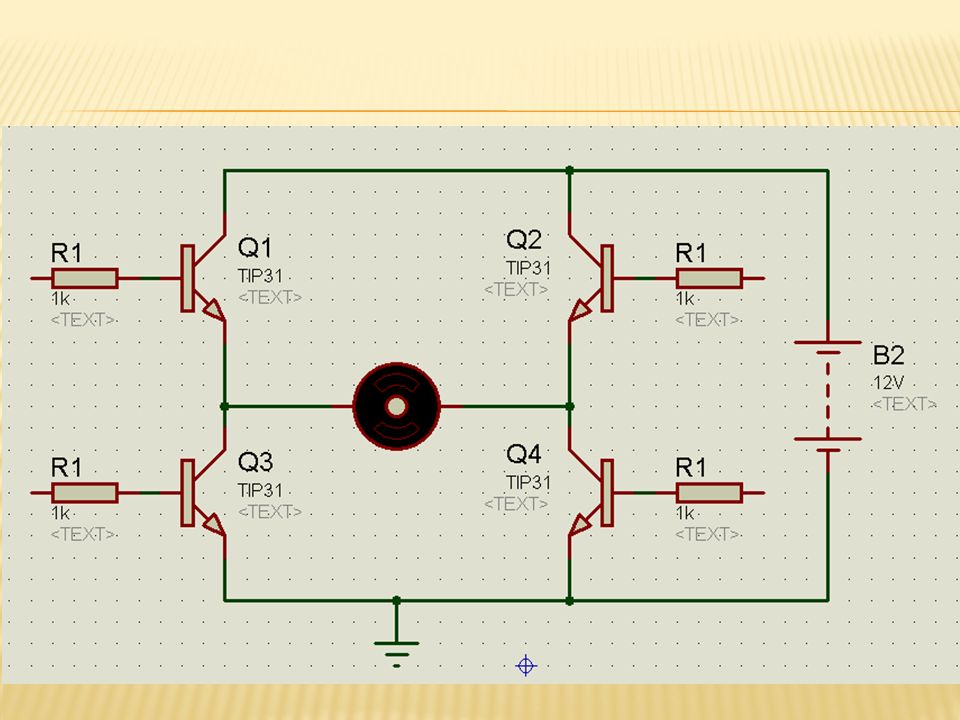
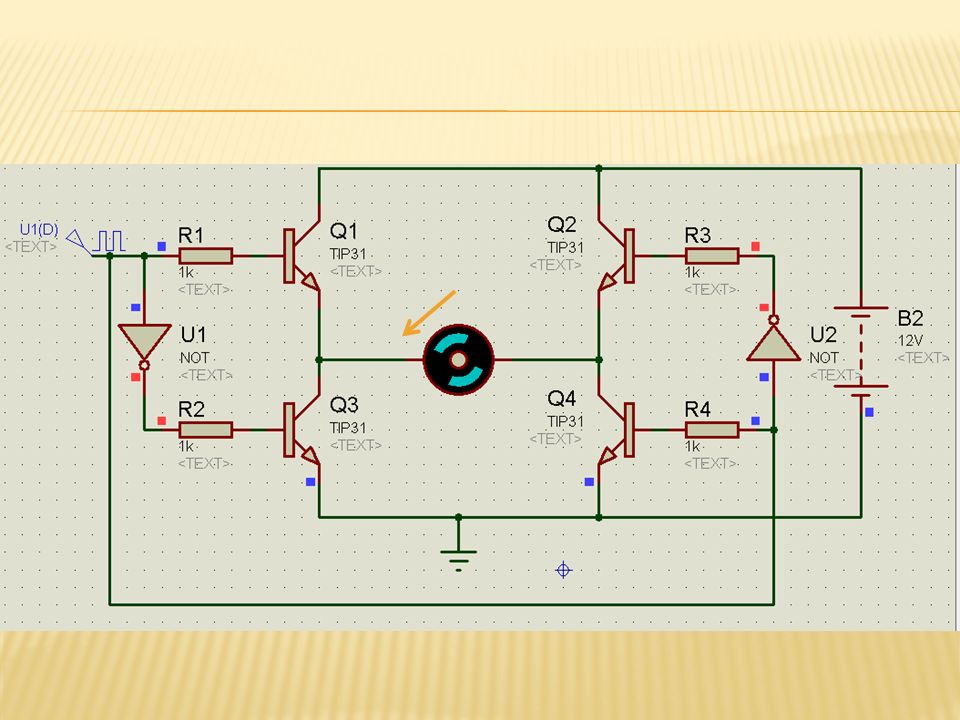
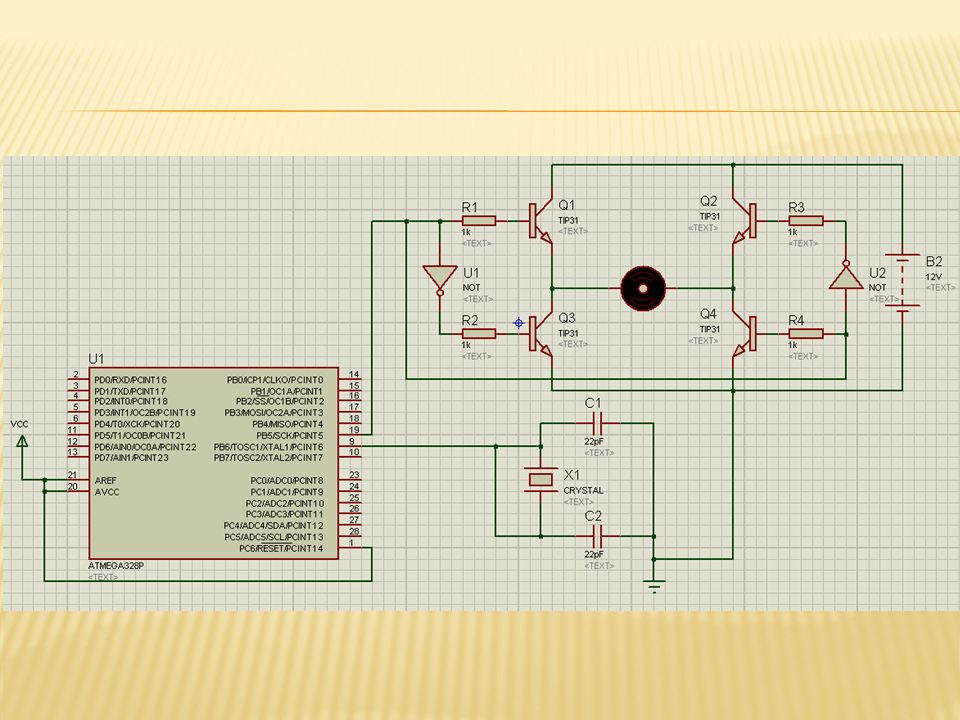
PONTE H com TRANSISTORES

25
PONTE-H com transistores
Montagem requer atenção quanto a aquecimento e polarização dos transistores Permite inversão de polaridade Utilizado para acionamento de motores DC em dois sentidos Como acionamento é eletrônico suporta comutação em altas taxas, logo é apropriado para controle PWM

27
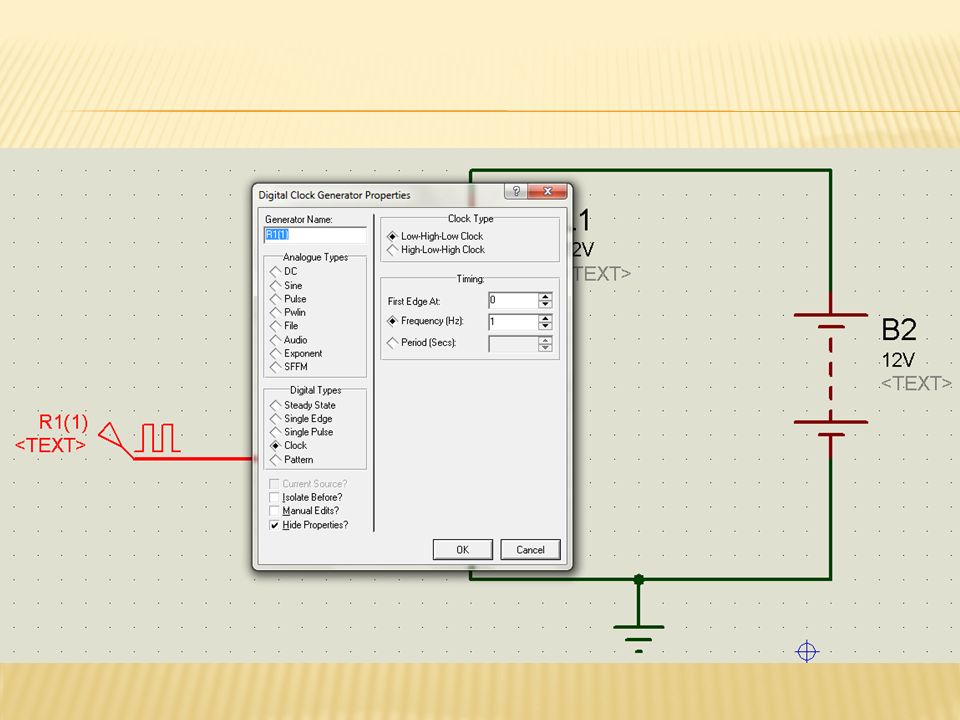
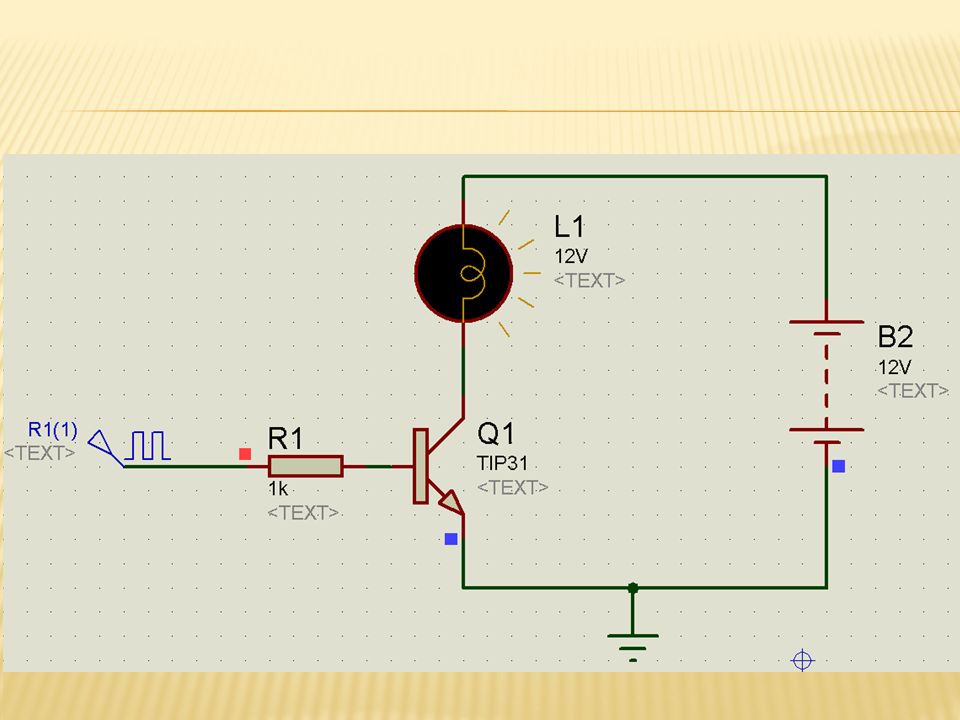
Transistor bipolar de junção - tbj
Região de corte / saturação Transistor opera como chave elétrica on/off Ao excitar a base o transistor satura e conduz (operação como chave fechada), ao não excitar a base o transistor corta (operando como chave aberta)
, ao não excitar a base o transistor corta (operando como chave aberta)")
28
Equivalente ao corte/saturação

29
Operação em corte/saturação
Transistor NPN Transistor PNP

30
TIP31 - NPN Alimentação de 5 a 15V; Correntes de até 2A

31
TIP32 - PNP Alimentação de 5 a 15V; Correntes de até 2A

40
Projeto de portão eletrônico

42
Projeto de portão eletrônico
Fluxo + Código + Simulação Eletrônica Motor DC para acionamento do portão Push-Button do controle sem fio Pressionado = 1; Não Pressionado = 0 Sensor de fim de curso de abertura Acionado = 1; Não Acionado = 0 Sensor de fim de curso de fechamento

43
Projeto de portão eletrônico
Lógica Versão 01 Quando o portão estiver fechado e o botão for pressionado, portão deve abrir Quando o portão estiver aberto e o botão for pressionado, portão deve fechar Se qualquer fim de curso for acionado motor deve parar

44
Projeto de portão eletrônico
Lógica Versão 02 Quando o portão estiver fechado e o botão for pressionado, portão deve abrir Quando o portão estiver aberto e o botão for pressionado, portão deve fechar Se o portão estiver abrindo e o botão for pressionado portão deve parar no meio Se portão parado no meio e botão for pressionado, portão deve inverter sentido anterior Se qualquer fim de curso for acionado motor deve parar

45
Projeto de portão eletrônico
Lógica Versão 03 Quando o portão estiver fechado e o botão for pressionado, portão deve abrir Quando o portão estiver aberto e o botão for pressionado, portão deve fechar Se o portão estiver abrindo e o botão for pressionado portão deve parar no meio Se portão parado no meio e botão for pressionado, portão deve inverter sentido anterior Se o portão estiver parado no meio 1min se passar portão deve fechar automaticamente Se qualquer fim de curso for acionado motor deve parar

46
Projeto de sumô de robôs

48
Projeto de robô de sumô Fluxo + Código + Simulação Eletrônica
Dois motores DC para acionamento do robô Push-Button para início do combate Sensor de borda da frente e atrás Preto = 0; Branco = 1 Sensor de oponente da esquerda e direita Vê oponente = 1; Não vê oponente = 0

49
Projeto de robô de sumô Lógica Versão 01
Robô aguarda indefinidamente que o botão de início seja pressionado Ao pressionar o botão robô aguarda 5 seg e inicia o combate se deslocando para frente Caso o sensor de borda da frente detecte a borda branca robô anda para trás Caso o sensor de borda de trás detecte a borda branca robô anda para frente

50
Projeto de robô de sumô Lógica Versão 02
Robô aguarda indefinidamente que o botão de início seja pressionado Ao pressionar o botão robô aguarda 5 seg e inicia o combate se deslocando para frente Caso o sensor de borda da frente detecte a borda branca robô anda para trás Caso o sensor de borda de trás detecte a borda branca robô anda para frente Caso os dois sensores detectem o oponente, robô vai para frente Caso nenhum sensor detecte o oponente, robô vai para trás

51
Projeto de robô de sumô Lógica Versão 03
Robô aguarda indefinidamente que o botão de início seja pressionado Ao pressionar o botão robô aguarda 5 seg e inicia o combate se deslocando para frente Caso o sensor de borda da frente detecte a borda branca robô anda para trás Caso o sensor de borda de trás detecte a borda branca robô anda para frente Caso os dois sensores detectem o oponente, robô vai para frente Caso sensor da esquerda detecte o oponente, robô gira para esquerda (idem direita) Caso nenhum sensor detecte o oponente, robô vai para trás
 Caso nenhum sensor detecte o oponente, robô vai para trás.")
52
Projeto de robô de sumô Lógica Versão 04
Robô aguarda indefinidamente que o botão de início seja pressionado Ao pressionar o botão robô aguarda 5 seg e inicia o combate se deslocando para frente Caso o sensor de borda da frente detecte a borda branca robô anda para trás Caso o sensor de borda de trás detecte a borda branca robô anda para frente Caso os dois sensores detectem o oponente, robô vai para frente Caso sensor da esquerda detecte o oponente, robô gira para esquerda (idem direita) Caso nenhum sensor detecte o oponente, robô vai para trás Após 90 segundos de luta robô deve parar!
 Caso nenhum sensor detecte o oponente, robô vai para trás. Após 90 segundos de luta robô deve parar!")
53
professor Victory Fernandes

Apresentações semelhantes











>")












