Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Introdução à Robocup RoboCupCIn

2
Introdução By the year 2050, develop a team of fully autonomous humanoid robots that can win against the human world soccer champion team.

3
Introdução Projeto Internacional (organização) Promover IA, Robótica e campos relacionados através de competições Problema padrão: Futebol Descentralização
 Promover IA, Robótica e campos relacionados através de competições Problema padrão: Futebol Descentralização")
4
Roteiro Categorias Simulador 2d - Ambiente - Percepção - Ação Times CMUnited - Brainstormers - Mecateam - RoboCupCIn Perspectivas

5
Categorias Four-Legged League - Times formados por 4 Sony AIBO’S

6
Categorias Small Size League - Híbrido de sistema centralizado/descentralizado

7
Categorias Small Size League

8
Categorias Middle Size League Sensores on-board

9
Categorias Humanoid League - Robôs com corpos e percepções “human-like” - Competições 2x2 e pênaltis

10
Categorias Robocup Rescue ResgateSimulação

11
Categorias Soccer Simulation 2D3D

12
Categorias Robocup Dance Robocup Lego Microsoft Robotics Studio Soccer Challenge Physical Visualization (Citizen)
")
13
Simulador 2d Servidor Agente-1 Agente-2...... Agente-11 Agente-12 Agente-1 Agente-2 Agente-11 Agente-12...... Monitor Ciclo: 100ms

14
Simulador 2d - Percepção Sensor Auditivo - Informação recebida a cada 150ms Sensor Corpóreo - Informação recebida a cada 150ms Sensor Visual - Informação recebida a cada 100ms

15
Simulador 2d - Percepção Sensor Auditivo - Mensagens do juiz - Mensagens do técnico - Mensagens dos jogadores Broadcast Canal não seguro

16
Simulador 2d - Percepção Sensor Corpóreo - Stamina - Velocidade - Ângulo da cabeça - Ângulo do corpo -...

17
Simulador 2d - Percepção Sensor Visual - Visão ruidosa: Quantidade x Qualidade.

18
Simulador 2d

19
Simulador 2d - Ações Limitações “humanas” Limitações impostas Ruídos

20
Simulador 2d - Ações catch Direção change_view Extensão Qualidade dash Potência kickPotência Direção move X Y say Mensagem turnMomento turn_neckÂngulo

21
Simulador 2d Juiz Técnico Treinador

22
Demonstração

23
Times - CMUnited PTS Domain 1. Periodic Team Synchronization. 2. Agentes autônomos X equipe. 3. Tempo real 4. Comunicações limitadas 5. Completa sincronização apenas em períodos limitados

24
Times - CMUnited Sensor Interpreter Predictor World Model Internal Behaviors Internal State External Behaviors Locker-Room Agreement TEAM MEMBER AGENT ARCHITECTURE “Layered Learning in Multiagent Systems: A Winning Approach to Robotic Soccer“ Peter Stone World

25
Times - CMUnited Layered Learning “Machine learning paradigm defined as a set of principles for the construction of hierarchical, learned solution to a complex task”

26
Times - Brainstormers “Our final goal is a learning system, where we only plug in ’win the match’ and our agents learn to generate the appropriate behavior”

27
Times - Mecateam

28
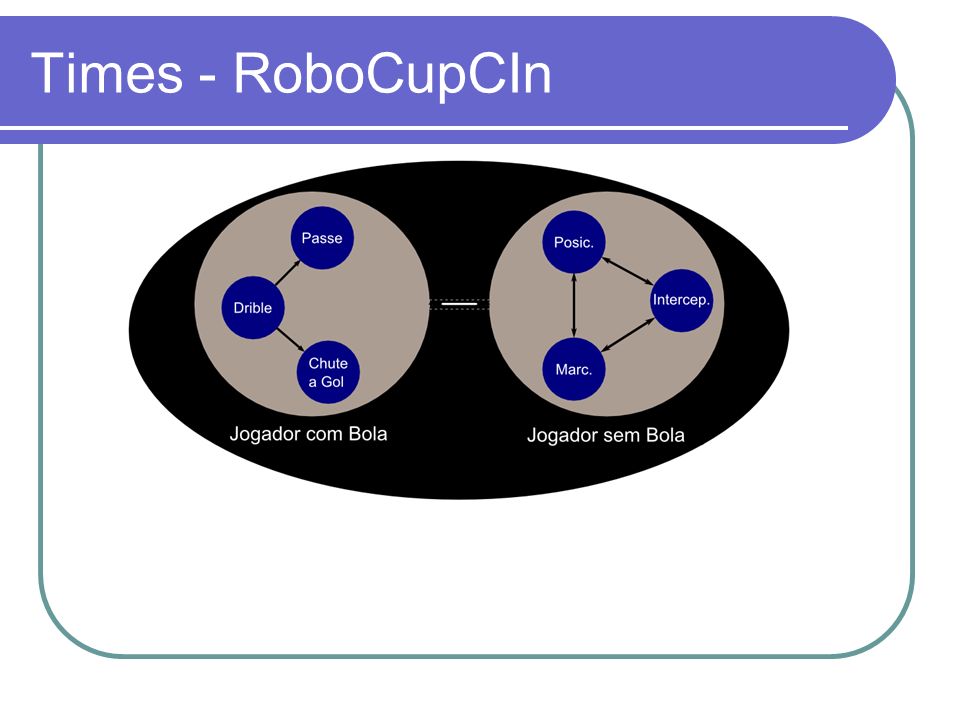
Times - RoboCupCIn

30
Resultados - 2007 5 lugar RoboCup Brazil Open 2007 18 lugar RoboCup China Open 2007 Perspectivas – 2008 Módulos com AM Perspectivas – 2009 Regras com AM

31
Times WrightEagle FCPortugal Bahia2D Itandroids

32
Perspectivas Criar novas equipes na UFPE Simulador Robótica Ligas internas 1º CIn Open – Março/2008 robocup-cin@googlegroups.com www.cin.ufpe.br/~robocupcin www.cin.ufpe.br/~robocupcin

33
Perspectivas Avanço na IA, robótica e áreas correlatas Maior integração Diferentes cursos Alunos do CIn Equipes com diferentes abordagens

34
Introdução à Robocup RoboCupCIn

Apresentações semelhantes


>")

>")






>")







