Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Aplicação de Algoritmos Genéticos e Redes Neuronais à Optimização e Fiabilidade Estrutural
Seminário no Âmbito do Projecto POCTI/ECM/36055/2000, Financiado pela Fundação para a Ciência e a Tecnologia João Rocha de Almeida João Cardoso FCT/UNL, Maio de 2004

2
Sumário - Optimização Estrutural - Algoritmos Genéticos
Fiabilidade Estrutural - Método de Monte Carlo Redes Neuronais - Exemplos

3
Programação Matemática
Optimização Estrutural Engloba um conjunto de teorias e métodos que procuram obter a estrutura que desempenha mais eficientemente as funções para as quais é projectada Conheceu grande desenvolvimento na década de 70 quando se interligaram algoritmos de Programação Matemática (Simplex, SLP, SQP) e Programas de Elementos Finitos Algoritmos Genéticos Elementos Finitos Programação Matemática Actualmente são muito utilizados Algoritmos Genéticos em vez de algoritmos de Programação Matemática
 e Programas de Elementos Finitos. Algoritmos Genéticos. Elementos Finitos. Programação Matemática. Actualmente são muito utilizados Algoritmos Genéticos em vez de algoritmos de Programação Matemática.")
4
Formulação do problema de Optimização Estrutural
Minimizar F(X) Função Objectivo onde X = {X1,X2,,XN} Vector das Variáveis de Projecto verificando c(X) 0 Constrangimentos normalizados e com Xmin X Xmax Limites Laterais das Variáveis de Projecto Função Objectivo Variáveis de Projecto Constrangimentos Peso Custo Dimensões Forma Topologia Deslocamentos Tensões Frequências
 Função Objectivo. onde X = {X1,X2,,XN} Vector das Variáveis de Projecto. verificando c(X) 0. Constrangimentos normalizados. e com Xmin X Xmax. Limites Laterais das Variáveis. de Projecto. Função Objectivo. Variáveis de Projecto. Constrangimentos. Peso. Custo. Dimensões. Forma. Topologia. Deslocamentos. Tensões. Frequências.")
5
Exemplo Duas vigas formando uma grelha Q= 175 kN/m
L1= 2,54 m , L2= 3,05 m adm= 138 Mpa = 77 kN/m3 Pretende-se minimizar o Peso da estrutura (Função Objectivo) modificando as Áreas das secções transversais das vigas, X1 e X2 (Variáveis de Projecto) considerando que a tensão nas vigas não pode ultrapassar a tensão admissível do material (Constrangimento) e assumindo valores máximos e mínimos para X1 e X2 (Limites Laterais)
 modificando as Áreas das secções transversais das vigas, X1 e X2 (Variáveis de Projecto) considerando que a tensão nas vigas não pode ultrapassar a tensão admissível do material (Constrangimento) e assumindo valores máximos e mínimos para X1 e X2 (Limites Laterais)")
6
Domínio do Problema Soluções : X1= 151,0 cm2 X2= 46,0 cm2 Peso= 4035 N X1= 35,2 cm2 X2= 164,4 cm2 Peso= 4556 N X1= 84,0 cm2 X2= 121,8 cm2 Peso= 4505 N

7
A maioria dos métodos desenvolvidos para resolver problemas de optimização procuram iterativamente no espaço das variáveis de projecto o ponto que minimiza a função objectivo verificando simultaneamente os constrangimentos. Essa pesquisa é feita com base no valor da função objectivo e dos constrangimentos e também dos seus gradientes em relação às variáveis de projecto A necessidade de calcular gradientes exige a continuidade das funções utilizadas, o que é uma limitação em alguns problemas. Por outro lado, os métodos baseados em gradientes tem muita dificuldade em lidar com funções que apresentem mínimos locais Um dos problemas em que não existe continuidade das funções corresponde ao problema de optimização com variáveis discretas

8
Algoritmos Genéticos Baseados no trabalho original de Holland, que utilizou representações binárias das possíveis soluções de um problema e transformações destinadas a aperfeiçoar essas soluções de forma a atingir a solução óptima . Variáveis de Projecto X1 X2 Cromossoma Genes ( 1, 1, 1, 0, 1, 0, 0, 1, 0, ...) Codificação Procuram reproduzir no computador o processo de selecção natural das espécies e utilizam a terminologia da Genética
 Codificação. Procuram reproduzir no computador o processo de selecção natural das espécies e utilizam a terminologia da Genética.")
9
O conjunto de cromossomas constituindo a população de uma determinada geração é combinada através de operadores para dar origem à população da geração seguinte, que contém indivíduos melhor adaptados, de acordo com uma função de mérito A aplicação de um algoritmo genético envolve : 1- Codificação das variáveis de projecto 2- Definição da função de mérito 3- Definição de operadores que alterem o conteudo dos cromossomas : Selecção - escolhe os índividuos de uma geração que deverão fazer parte da geração seguinte Cruzamento - combina os genes de dois cromossomas pais para dar origem a dois cromossomas filhos distintos dos progenitores Mutação - altera de forma aleatória os genes de um cromossoma

10
Exemplo Pórtico plano Forças verticais em todos os nós de 444,8 kN
2 1 3 5 4 6 8 7 9 11 10 12 14 13 15 17 16 18 20 19 21 23 22 24 8 x m 3.048 m 8.473 kN 7.264 kN 6.054 kN 4.839 kN 3.630 kN 2.420 kN 1.210 kN Pórtico plano Forças verticais em todos os nós de ,8 kN Forças horizontais indicadas adm= 5,08 cm E= 200 GPa 8 grupos de elementos Pretende-se minimizar o peso da estrutura escolhendo os perfis mais adequados numa tabela com 16 perfis W (Optimização discreta) considerando que o deslocamento horizontal no topo deve ser inferior a adm
 considerando que o deslocamento horizontal no topo deve ser inferior a adm.")
11
Tabela de perfis Cromossoma ( 4, 6, 8, 12, 10, 6, 8, 8 )
W27X84 W24X68 W21X62 W21X44 W18X46 W18X35 W16X31 W16X26 W14X38 W14X26 W12X40 W12X16 W10X39 W10X33 W8X31 W8X18 Cromossoma ( 4, 6, 8, 12, 10, 6, 8, 8 ) W21x44 W18x35 W16x26 W12x16 W14x26 Peso : 31,72 kN
 W21x44. W18x35. W16x26. W12x16. W14x26. Peso : 31,72 kN.")
12
Trabalho Desenvolvido - I
Problema : Dada uma estrutura constituída por um conjunto N de componentes, descobrir qual a solução óptima que corresponderá a usar um número K de perfis normalizados na sua construção, a escolher entre um número M de perfis disponíveis Solução : Cromossoma composto. Os primeiros K genes constituem índices na tabela de perfis disponíveis. Os restantes N ( 1 por cada grupo de componentes ) referem-se a um dos K genes iniciais. Cada cromossoma define uma solução para o problema
 referem-se a um dos K genes iniciais. Cada cromossoma define uma solução para o problema.")
13
Tabela de perfis Exemplo pórtico plano Cromossoma
W27X84 W24X68 W21X62 W21X44 W18X46 W18X35 W16X31 W16X26 W14X38 W14X26 W12X40 W12X16 W10X39 W10X33 W8X31 W8X18 Exemplo pórtico plano W18x35 W16x31 W16x26 Cromossoma ( 6, 7, 8, | 1, 2, 3, 3, 1, 1, 3, 3 ) K= 3 Peso : 31,96 kN
 K= 3 Peso : 31,96 kN.")
14
K Solução p1 Solução p2 Volume (m3) Peso (kN) 1 6 6, 6, 6, 6, 6, 6, 6, 6 0.4860 37,43 2 6, 8 6, 6, 8, 8, 6, 6, 8, 8 0.4242 32,67 3 6, 7, 8 6, 7, 8, 8, 6, 6, 8, 8 0.4150 31,96 5 4, 6, 8, 10, 12 4, 6, 8, 12, 10, 6, 8, 8 0.4119 31,72

15
Trabalho Desenvolvido - II
Problema : Obter vários mínimos globais ou um mínimo global e vários mínimos locais, quando estes ocorram na função a optimizar Solução : Partição regular do domínio em sub-domínios, cada qual contendo uma sub-população Evolução isolada de cada sub-população para o óptimo que ocorre no sub-domínio Processo de adaptação automática da partição do domínio às características do problema que se pretende resolver Processo de transferência de elementos entre sub-populações, permitindo enriquecer as regiões de elevado potencial onde é mais provável que existam óptimos, em detrimento das regiões sem interesse

16
Função Branin RCOS (BRC)
")
17
Função Branin RCOS (BRC)
")
18
Exemplo : duas vigas formando uma grelha

19
Fiabilidade Estrutural
A verificação da segurança de uma estrutura implica: S < R, onde S representa a acção e R a resistência Tanto S como R dependem de diversas variáveis aleatórias, X1,...,Xn

20
òò ò [ ] Função de estado limite: g(X1,...,Xn) = R – S
A violação do estado limite é definida pela condição g( X1, X2, ..., Xn) 0 e a probabilidade de colapso, Pc , pode ser formalmente expressa pela equação: [ ] n X g c dx x f P ... K 2 1 , ) ( òò ò = onde (x1, x2, ..., xn) são ocorrências das variáveis aleatórias e ) , ( 2 1 n X x f ... é a função conjunta de densidade de probabilidade
![òò ò [ ] Função de estado limite: g(X1,...,Xn) = R – S](http://slideplayer.com.br/slide/1617289/5/images/20/%C3%B2%C3%B2+%C3%B2+%5B+%5D+Fun%C3%A7%C3%A3o+de+estado+limite%3A+g%28X1%2C...%2CXn%29+%3D+R+%E2%80%93+S.jpg "A violação do estado limite é definida pela condição g( X1, X2, ..., Xn) 0 e a probabilidade de colapso, Pc , pode ser formalmente expressa pela equação: [ ] n. X. g. c. dx. x. f. P. ... K , ) ( òò. ò. = onde (x1, x2, ..., xn) são ocorrências das variáveis aleatórias e. ) , ( n. X. x. f. ... é a função conjunta de densidade de probabilidade.")
21
A fiabilidade de uma estrutura pode também ser medida pelo índice de fiabilidade, , que representa a distância do ponto de rotura mais provável à origem, no espaço (R, S) de coordenadas normalizadas Conhecendo b, a probabilidade de colapso é dada por: onde é a função distribuição normal padrão

22
Método de Monte Carlo Permite obter uma estimativa da probabilidade de colapso, å = N i n c X I P 1 2 ) , ( ... (1) onde ) , ,... ( 2 1 n X I é uma função definida por î í ì > = se g ... de acordo com a equação (1), N amostras independentes de valores das variáveis aleatórias são obtidas com base nas distribuições de probabilidade dessas variáveis e a função de estado limite é calculada para cada amostra. Designando por NH o número de casos em que ocorreu o colapso, a probabilidade de colapso da estrutura é aproximada por : N P H c =
 , ( ... (1) onde. ) , ,... ( n. X. I. é uma função definida por. î. í. ì. > £ = se. g. ... de acordo com a equação (1), N amostras independentes de valores das variáveis aleatórias são obtidas com base nas distribuições de probabilidade dessas variáveis e a função de estado limite é calculada para cada amostra. Designando por NH o número de casos em que ocorreu o colapso, a probabilidade de colapso da estrutura é aproximada por : N. P. H. c. =")
23
A aplicação do método de Monte Carlo apresenta as seguintes
Vantagens : Método probabilístico exacto, ou de nível 3 (cf. Eurocódigo 1), onde a probabilidade de colapso é avaliada a partir da distribuição conjunta de probabilidade das variáveis associadas às acções e às resistências Permite avaliar a probabilidade de colapso de um sistema em que se consideram simultaneamente várias funções de estado limite Desvantagens : Requer um modelo estatístico de todas as variáveis aleatórias envolvidas Tempo de cálculo muito elevado Para estados limites últimos ( 104 PC 106 ) é necessário avaliar g(X) entre 105 e 107 vezes para obter resultados com uma aproximação aceitável
, onde a probabilidade de colapso é avaliada a partir da distribuição conjunta de probabilidade das variáveis associadas às acções e às resistências. Permite avaliar a probabilidade de colapso de um sistema em que se consideram simultaneamente várias funções de estado limite. Desvantagens : Requer um modelo estatístico de todas as variáveis aleatórias envolvidas. Tempo de cálculo muito elevado. Para estados limites últimos ( 104 PC 106 ) é necessário avaliar g(X) entre 105 e 107 vezes para obter resultados com uma aproximação aceitável.")
24
Redes Neuronais Técnica de inteligência artificial inspirada no funcionamento dos neurónios biológicos

25
f ( S ) Neurónio artificial introduzido por McCulloch e Pitts (1943)
x 1 w m1 m2 m3 mL f ( S ) b m 2 3 L . s O uso de redes neuronais tem vindo a generalizar-se em vários domínios, entre os quais a mecânica estrutural e em particular a fiabilidade de estruturas
 b. m L. . s. O uso de redes neuronais tem vindo a generalizar-se em vários domínios, entre os quais a mecânica estrutural e em particular a fiabilidade de estruturas.")
26
Rede neuronal multicamada ( 3 x 4 x 3 )
f ( S ) w 1 11 x w 2 1 = 11 f ( S ) s 2 w 1 1 12 b 1 w 1 1 w 2 13 12 w 2 w 1 13 w 2 21 f ( S ) 14 b 2 1 w 1 22 w 2 21 w 1 x 23 w 2 2 = 1 22 2 b f ( S ) s 2 2 w 1 w 2 31 23 w 2 w 1 24 32 f ( S ) b 2 2 w 1 w 2 33 w 2 31 32 x w 1 41 b 1 w 2 33 S s 2 3 = 3 f ( ) 3 w 1 42 w 2 34 w 1 43 f ( S ) b 2 3 b 1 4
 w x. w = 11. f. ( S. ) s. 2. w b. 1. w w w. 2. w w f. ( S. ) 14. b w w w. 1. x. 23. w = b. f. ( S. ) s w. 1. w w. 2. w f. ( S. ) b w. 1. w w x. w b. 1. w S. s = 3. f. ( ) 3. w w w f. ( S. ) b b")
27
O tempo necessário para calcular o valor das funções que uma rede neuronal multicamada aprendeu é muito reduzido O cálculo corresponde apenas a algumas operações matriciais

28
O processo de obter os coeficientes wmk e bm de forma que a rede neuronal possa representar uma função designa-se por treino da rede O treino mais comum, treino supervisionado, consiste em arbitrar valores iniciais para os coeficientes e em seguida ajustar esses valores de forma a minimizar o erro entre as saídas obtidas pela rede e o resultado exacto da função Para proceder assim, é necessário construir um conjunto de treino, com valores das variáveis de entrada e os correspondentes valores da função. Após o treino, a rede deve ser testada com um conjunto de teste Neste trabalho utilizou-se um algoritmo misto, minimizando-se inicialmente o erro com um algoritmo genético e em seguida com um algoritmo de gradientes conjugados

29
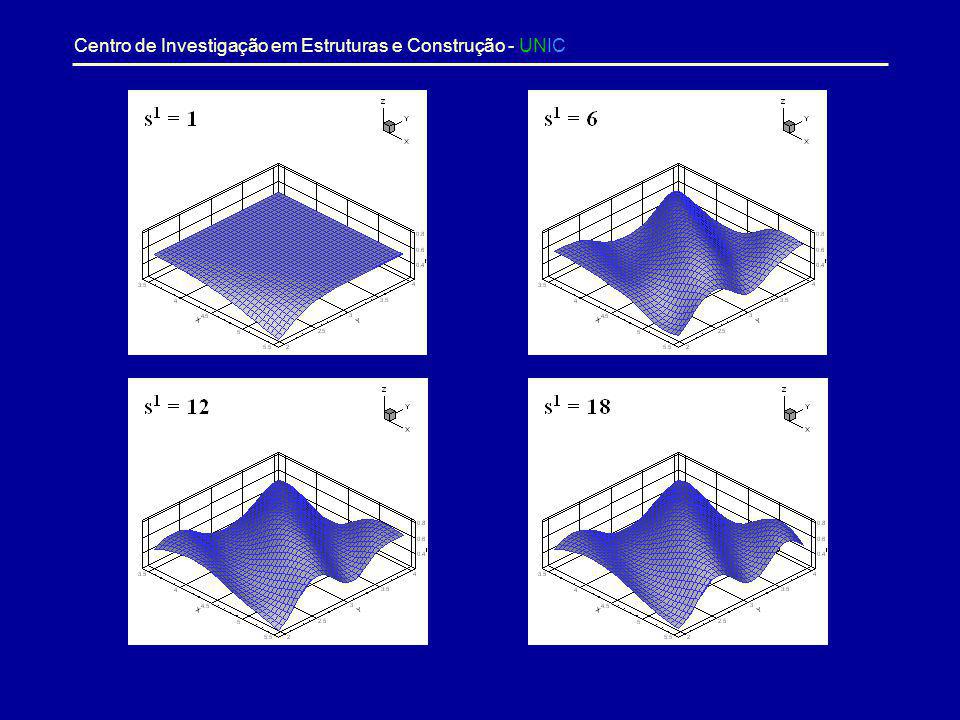
Exemplo Função analítica
F(X,Y) = 0,3 + ( 2 Sin( X ) Cos ( Y ) + Sin ( X Y ) ) / 6 com X [3.5 , 5.5] e Y [2.0 , 4.0] Conjunto de treino com 14 x 14 = 196 pontos Conjunto de teste com 32 x 32 = 1024 pontos
 = 0,3 + ( 2 Sin( X ) Cos ( Y ) + Sin ( X Y ) ) / 6. com X [3.5 , 5.5] e Y [2.0 , 4.0] Conjunto de treino com. 14 x 14 = 196 pontos. Conjunto de teste com. 32 x 32 = 1024 pontos.")
31
Medidas do erro Resultados do treino s1 Erro treino,E máx (%)
médio (%) t (h:m:s) 1 1,5510-2 114 21 00:00:01 6 7,1510-4 32 3,9 00:02:30 12 9,2210-5 26 1,1 00:29:11 18 5,4910-6 2,5 0,38 02:09:32 24 1,7910-6 1,9 0,35 06:36:48 30 1,1910-6 1,5 0,23 18:32:06 36 1,9710-7 0,93 0,095 41:02:08
 t (h:m:s) 1. 1,55 :00: ,15 ,9. 00:02: ,22 ,1. 00:29: ,49 ,5. 0,38. 02:09: ,79 ,9. 0,35. 06:36: ,19 ,5. 0,23. 18:32: ,97 ,93. 0, :02:08.")
32
Trabalho Desenvolvido - III
Utilização da rede neuronal para aprender o comportamento da estrutura Pórtico intermédio de uma nave industrial com 20x10x4 m Espaçamento de 5 m entre pórticos semelhantes Definição das acções segundo o Eurocódigo 1, considerando-se os seguintes valores característicos : Cargas permanentes – 0,5 kN/m2 correspondente ao peso próprio da estrutura acrescido do revestimento da cobertura e da fachada Sobrecarga – 2 kN/m2, correspondente a uma utilização normal Vento – considera-se uma pressão dinâmica do vento igual a 0,456 kN/m2

33
Funções de estado limite
Função Descrição H L2/150 Deslocamento horizontal máximo do pilar V L1/300 Deslocamento vertical máximo da viga Resistência à flexão composta com compressão do pilar Resistência à flexão composta com compressão da viga considerando a possibilidade de encurvadura lateral Um pórtico com pilares HEA 260 e uma viga HEA 300 verifica a segurança aos estados limites. Os deslocamentos e esforços de dimensionamento são : H = 1,32 mm ; V = 16,8 mm NSd(Pilar) = 98,6 kN (topo do pilar direito – secção C) My,Sd(Pilar) = 122,5 kNm (topo do pilar direito – secção C) NSd(Viga) = 46,7 kN (extremidade direita – secção C) My,Sd(Viga) = 122,5 kNm (extremidade direita – secção C)
 = 98,6 kN (topo do pilar direito – secção C) My,Sd(Pilar) = 122,5 kNm (topo do pilar direito – secção C) NSd(Viga) = 46,7 kN (extremidade direita – secção C) My,Sd(Viga) = 122,5 kNm (extremidade direita – secção C)")
34
Distribuição probabilística
Variável Distribuição Média Desvio Padrão Coefic. Variação Valor Característico Módulo de Young (GPa) Normal 210 10,5 0,05 Carga permanente (kN/m2) 0,50 0,10 Sobrecarga (kN/m2) LogNormal 1,06 0,366 0,35 2,0 Pressão do vento (kN/m2) 0,241 0,084 0,456 Tensão de cedência (MPa) 280 28 235 Numa análise preliminar, verificou-se que os valores dos deslocamentos H e V são muito inferiores aos admissíveis, pelo que a probabilidade de colapso associada aos estados limites de utilização é desprezável. Como os esforços na estrutura não dependem do módulo de Young, esta variável foi retirada do modelo probabilístico
 Normal ,5. 0,05. Carga permanente (kN/m2) 0,50. 0,10. Sobrecarga (kN/m2) LogNormal. 1,06. 0,366. 0,35. 2,0. Pressão do vento (kN/m2) 0,241. 0,084. 0,456. Tensão de cedência (MPa) Numa análise preliminar, verificou-se que os valores dos deslocamentos H e V são muito inferiores aos admissíveis, pelo que a probabilidade de colapso associada aos estados limites de utilização é desprezável. Como os esforços na estrutura não dependem do módulo de Young, esta variável foi retirada do modelo probabilístico.")
35
Rede neuronal com 3 x s1 x 3 neurónios
Considerou-se um conjunto de treino com 6 x 6 x 6 = 216 pontos e um conjunto de teste com 12 x 12 x 12 = 1728 pontos. Resultados do treino – Erro quadrático médio s1 - número de neurónios da camada intermédia Erro obtido com o conjunto de treino Erro obtido com o conjunto de teste 4 6,2810-6 2,9710-6 6 3,8510-7 3,4410-7 8 1,0110-7 8,2710-8 10 3,2010-9 2,2010-9 12 1,7710-9 1,5310-9

36
Resultados do treino – Erro relativo máximo
s1 - número de neurónios da camada intermédia máx(%) N (pilar) N (viga) M (pilar e viga) 4 1,42 2,14 1,11 6 0,771 0,711 8 0,545 0,516 0,503 10 0,105 0,107 0,071 12 0,067 0,069
 N (pilar) N (viga) M (pilar e viga) 4. 1,42. 2,14. 1, ,771. 0, ,545. 0,516. 0, ,105. 0,107. 0, ,067. 0,069.")
37
Resultados da análise de fiabilidade
Número de amostras Probabilidade de colapso Tempo de cálculo (segundos) 106 1,43105 22 107 1,39105 189 108 1,28105 1865 Função de Estado Limite Monte Carlo c/ rede neuronal directo FORM ( COMREL-TI) SORM (COMREL-TI) Resistência à flexão composta com compressão do pilar Pc = 1,277 105 = 4,21 Pc = 1,255 105 Pc = 1,229 105 = 4,22 Pc = 1,285 105 Resistência à flexão composta com compressão da viga, considerando a possibilidade de encurvadura lateral Pc = 8,630 106 = 4,30 Pc = 8,607 106 Pc = 8,275 106 = 4,31 Pc = 8,650 106
 ,4310 ,3910 ,2810 Função de Estado Limite. Monte Carlo. c/ rede neuronal. directo. FORM. ( COMREL-TI) SORM. (COMREL-TI) Resistência à flexão composta com compressão do pilar. Pc = 1,277 105. = 4,21. Pc = 1,255 105. Pc = 1,229 105. = 4,22. Pc = 1,285 105. Resistência à flexão composta com compressão da viga, considerando a possibilidade de encurvadura lateral. Pc = 8,630 106. = 4,30. Pc = 8,607 106. Pc = 8,275 106. = 4,31. Pc = 8,650 106.")
38
Trabalho Desenvolvido - IV
Utilização da rede neuronal para aprender a função de estado limite g(X) Pórtico metálico com 6 andares Dimensões : 12 x 22,5 m As cargas verticais, horizontais e a tensão de cedência do aço foram consideradas variáveis aleatórias Comportamento geometricamente e fisicamente não-linear Análises elasto-plásticas considerando a formação de zonas plásticas HEB220 31.7 kN/m Y0 10.2 kN 49.1 kN/m 20.4 kN 2 x 6.00 m 6 x 3.75 m E = 205 GPa fy = 235 MPa Y0 = 1/450 IPE400 IPE360 IPE240 IPE300 IPE330 HEB180 HEB200 HEB240 HEB260
 Pórtico metálico com 6 andares. Dimensões : 12 x 22,5 m. As cargas verticais, horizontais e a tensão de cedência do aço foram consideradas variáveis aleatórias. Comportamento geometricamente e fisicamente não-linear. Análises elasto-plásticas considerando a formação de zonas plásticas. HEB kN/m. Y kN kN/m kN. 2 x 6.00 m. 6 x 3.75 m. E = 205 GPa. fy = 235 MPa. Y0 = 1/450. IPE400. IPE360. IPE240. IPE300. IPE330. HEB180. HEB200. HEB240. HEB260.")
39
tensão de cedência (MPa)
Considerou-se uma única função de estado limite, associada ao colapso elasto-plástico do pórtico. Distribuição probabilística (*: valores para último piso) variável média desvio padrão coeficiente variação valor característico carga vertical (kN/m) 33.3 (21.5*) 6.66 (4.30*) 0.20 49.1 (31.7*) carga horizontal (kN) 10.76 (5.38*) 3.76 (1.88*) 0.35 20.4 (10.2*) tensão de cedência (MPa) 280 28 0.10 235
 variável. média. desvio padrão. coeficiente variação. valor característico. carga vertical (kN/m) (21.5*) 6.66 (4.30*) (31.7*) carga horizontal (kN) (5.38*) 3.76 (1.88*) (10.2*) tensão de cedência (MPa)")
40
Rede neuronal com 3 x s1 x 1 neurónios
Considerou-se um conjunto de treino com 8 x 8 x 8 = 512 pontos e um conjunto de teste com 7 x 7 x 7 = 343 pontos. Resultados do treino nº neurónios - s1 Erro treino,E Respostas erradas no treino Respostas erradas no teste tempo treino (s) 4 4.036103 2 1 506 8 2.763103 5830 12 1.867103 23517
 10 10 10")
41
Resultados da análise de fiabilidade
A análise de fiabilidade foi realizada pelo método de Monte Carlo com 107 amostras. Resultados da análise de fiabilidade nº neurónios - s1 pf (média) pf (desvio p.) (média) tempo simulação (s) 4 2.726104 3.326106 3.46 81 8 2.489104 7.062106 3.48 113 12 2.426104 3.910106 3.49 141
 pf (desvio p.) (média) tempo simulação (s) 10 10 10 10 10 10")
42
Trabalho Desenvolvido - V
Optimização com constrangimentos de fiabilidade Na optimização com constrangimentos de fiabilidade, pelo menos um dos constrangimentos c(X) está relacionado com a fiabilidade da estrutura A metodologia normalmente empregue para resolver este tipo de problema recorre a algoritmos baseados em gradientes e aos métodos FORM ou SORM, baseados na determinação do índice de fiabilidade, b. Optou-se por considerar uma estratégia combinando um algoritmo genético, o método de Monte Carlo e uma rede neuronal Esta estratégia implica a utilização do método de Monte Carlo para todos os elementos da população considerados pelo algoritmo genético
 está relacionado com a fiabilidade da estrutura. A metodologia normalmente empregue para resolver este tipo de problema recorre a algoritmos baseados em gradientes e aos métodos FORM ou SORM, baseados na determinação do índice de fiabilidade, b. Optou-se por considerar uma estratégia combinando um algoritmo genético, o método de Monte Carlo e uma rede neuronal. Esta estratégia implica a utilização do método de Monte Carlo para todos os elementos da população considerados pelo algoritmo genético.")
43
Exemplo (Burton & Hajela, 2003) Treliça plana com 6 barras
Na configuração inicial indicada, nX = nY = 3 m E = 206 GPa Massa específica, = 7,8 x 103 kg/m3 ny nx P 1 2 3 4 5 6 Função objectivo : - Massa da treliça Variáveis de projecto : - Àrea da secção das barras, A. Coordenada X e Y do nó 4, nX

44
Variáveis aleatórias : Carga concentrada P aplicada no nó 3
- Tensão de cedência do aço utilizado, C Distribuição probabilística Variável Distribuição Média Desvio padrão Coefic. variação Carga concentrada, P (kN) Normal 30 3 0,10 Tensão de cedência, C (MPa) 172 8,6 0,05
 Normal ,10. Tensão de cedência, C (MPa) ,6. 0,05.")
45
Constrangimento : Verificou-se que as barras 3, 4 e 5 eram as mais solicitadas, e definiram-se três funções de estado limite g1 = C 3 g2 = C 4 g3 = C 5 Considerou-se que o colapso da estrutura ocorre quando em pelo menos uma das barras se atinge C Sistema em série sendo a respectiva probabilidade de colapso, Pc, calculada pelo método de Monte Carlo Definiu-se um único constrangimento : impondo-se Pmax = 0,001 , a que corresponde = 3,090

46
Rede neuronal com 3 x s1 x 4 neurónios
Considerou-se um conjunto de treino com 6 x 6 x 6 = 216 pontos e um conjunto de teste com 5 x 5 x 5 = 125 pontos. Resultados do treino – Erro quadrático médio Nº neurónios - s1 Erro obtido com o conjunto de treino Erro obtido com o conjunto de teste 6 1,296710-3 7,829510-4 12 1,921810-5 1,835210-5 24 1,600510-6 2,060810-6 Resultados do treino – Erro relativo máximo Nº neurónios – s1 máx(%) M 3 4 5 6 1,167 2,240 2,949 12 0,238 0,529 0,399 24 0,0775 0,199 0,148
 M. 3. 4. ,167. 2,240. 2, ,238. 0,529. 0, , ,199. 0,148.")
47
A probabilidade de colapso da estrutura foi estimada com 105 amostras
Algoritmo genético Cromossomas com 40 genes binários (20 por variável), populações com 40 indivíduos e um total de 60 gerações. A probabilidade de colapso da estrutura foi estimada com 105 amostras Resultados da optimização Variável / Função objectivo Algoritmo genético + Rede neuronal Burton & Hajela Diferença (%) A (m2) 2,359 2,366 0,28 nx (m) 1,563104 1,557104 0,36 Massa (kg) 22,512 22,450 Tempo total de cálculo durante a optimização : 6394 s ( 1 H 47 m )
, populações com 40 indivíduos e um total de 60 gerações. A probabilidade de colapso da estrutura foi estimada com 105 amostras. Resultados da optimização. Variável / Função objectivo. Algoritmo genético + Rede neuronal. Burton & Hajela. Diferença (%) A (m2) 2,359. 2,366. 0,28. nx (m) 1,563104. 1,557104. 0,36. Massa (kg) 22, ,450. Tempo total de cálculo durante a optimização : 6394 s ( 1 H 47 m )")
48
Conclusões Demonstrou-se a viabilidade da aplicação das metodologias desenvolvidas : Algoritmos Genéticos para optimização de estruturas com secções normalizadas Algoritmos genéticos para optimização de funções com vários mínimos globais e/ou locais Método de Monte Carlo + Redes Neuronais para análise de fiabilidade Algoritmos Genéticos + Método de Monte Carlo + Redes Neuronais para optimização de estruturas com constrangimentos de fiabilidade

Apresentações semelhantes
 – Lápides 1, 2, 3» «nomes gravados, 21 de Agosto de 2008» «Ultramar.TerraWeb»>")









. Nenhuns direitos reservados, excepto para fins comerciais. Por favor, não coloque.>")


 2.Comparação.>")





