Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Tela e comandos do Lego Mindstorms
Programando o Robô Tela e comandos do Lego Mindstorms

3
Após escolher o botão de comando do motor no ícone move, aparecem as informações sobre este motor na parte inferior da tela. Ligação do Motor Potência Duração

4
Configurando o motor Conforme a imagem anterior deve-se escolher se o motor estará ligado na saída A, B ou C do NXT. Além disso, também deve-se configurar a duração do movimento, e o seu sentido(frente ou para trás). Também a sua potência e tempo de duração do seu movimento em:Rotações, Segundos, Graus ou tempo ilimitado.
. Também a sua potência e tempo de duração do seu movimento em:Rotações, Segundos, Graus ou tempo ilimitado.")
5
Configurando o movimento de um motor
No próximo slide será apresentado a configuração de um motor para ser ligado na porta “A”, andar por 10 segundos para frente a uma potência de 50% e parar. A parada será feita usando-se a opção “Brake”, que faz com que ele pare imediatamente. A opção “Coast” faz com que o motor dê mais um giro o que em algumas situações pode fazer com que ele avance em um espaço que não deveria.

6
As informações configuradas abaixo,
aparecem no ícone do motor.

7
O movimento e a duração do movimento também pode ser programada para acontecer quando um sensor for acionado. Para isso altera-se a duração para Ilimitado e isere-se o sensor no programa. Tempo,Toque, Luz, Som e Distância

8
Sensor ligado na porta 3 e programado para intensidade de luz menor que 30%

9
Tempo de duração do movimento do motor “A”, alterado para Ilimitado
Tempo de duração do movimento do motor “A”, alterado para Ilimitado. Ele funcionará até que o sensor de luz encontre uma intensidade de luz menor que 30%, então o motor irá parar imediatamente.

10
Usando o comando de Switch, é possível programar o Robô para executar uma ação dependendo da condição do sensor. Neste exemplo o motor “A” vai funcionar quando o botão do sensor de toque for pressionado. Assim que ele for solto o motor irá parar.

11
No Slide anterior, o robô estava programado para executar a ação uma só vez e parar. Se desejar-se que ele continue repetindo a ação, então é necessário colocar os comandos dentro de um Loop e configurá-lo para quantas vezes será repetida. Neste caso foi configurado para que repita infinitamente até que o Robô seja desligado.

12
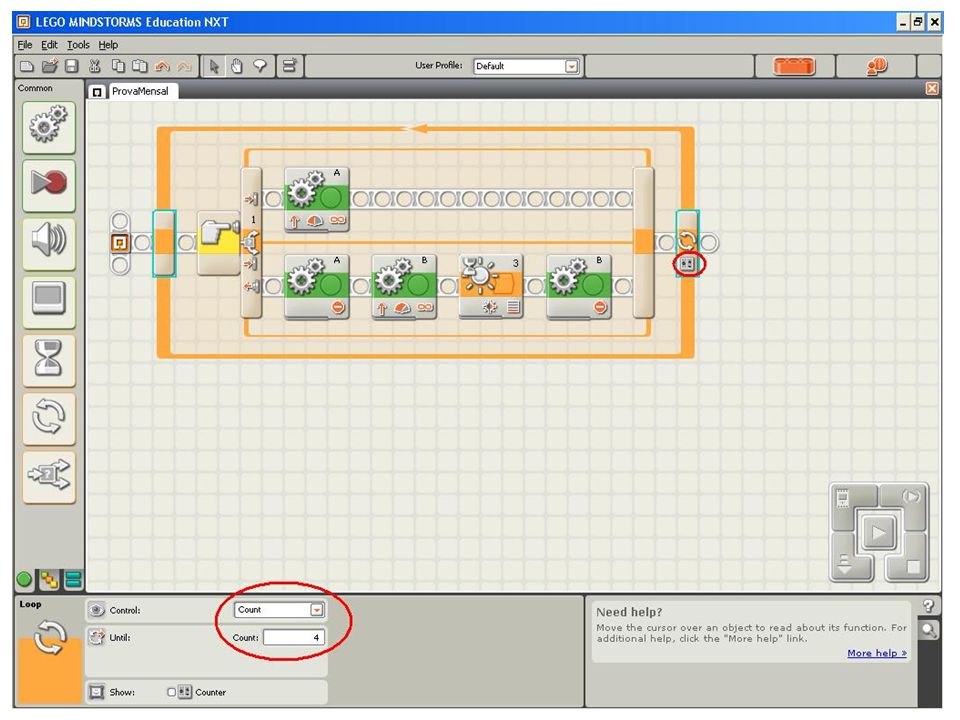
Programa Exemplo A seguir um programa que irá fazer o motor “A” funcionar quando o sensor de toque for pressionado. Quando o sensor for solto ele irá parar e o Motor “B” começará a funcionar até que o sensor de luz encontre intensidade menor que 40%. Irá repetir esta ação por 4 vezes.

14
Após concluir o programa é só clicar no botão Play para transferir-lo para o NXT.

Apresentações semelhantes