Carregar apresentação
1
Algoritmos de Classificação e Verificação de Impressões Digitais

2
Imagem Cena real: cada ponto no espaço emite um impulso luminoso
Definição matemática (imagem contínua): Função i: U C, onde U é uma superfície do R³ e C é um espaço vetorial Como i é função, pode-se definir continuidade, derivada, gradiente Geralmente U é um subconjunto do plano e C é um espaço de cor Se dim(C) = 1, a imagem é monocromática (geralmente em tons de cinza) Imagens coloridas são formadas por 3 componentes (geralmente Red, Green, Blue) Imagens coloridas são tratadas, em muitos casos, como três imagens distintas em tons de cinza
: Função i: U C, onde U é uma superfície do R³ e C é um espaço vetorial. Como i é função, pode-se definir continuidade, derivada, gradiente. Geralmente U é um subconjunto do plano e C é um espaço de cor. Se dim(C) = 1, a imagem é monocromática (geralmente em tons de cinza) Imagens coloridas são formadas por 3 componentes (geralmente Red, Green, Blue) Imagens coloridas são tratadas, em muitos casos, como três imagens distintas em tons de cinza.")
3
Imagem Digital Representação Matricial:
A = (ajk)mxn = (i(xj, yk)) Discretização de um retângulo Cada elemento: pixel (picture element) Representações retangular e hexagonal: simplificação da definição de vizinhança 4-vizinhança e 8-vizinhança de um pixel
mxn = (i(xj, yk)) Discretização de um. retângulo. Cada elemento: pixel (picture element) Representações retangular e hexagonal: simplificação da definição de vizinhança. 4-vizinhança e 8-vizinhança de um pixel.")
4
Formato de um arquivo de imagem
Cabeçalho: formato, dimensões da imagem, padrão de compressão Vetor de cores formado pelas linhas da matriz da imagem 24 bits: canal alpha, R, G, B (8 bits para cada componente) 8 bits: tons de cinza (R = G = B) preto = 0; branco = 255 1 bit (imagem binarizada): preto = 0; branco = 1
 8 bits: tons de cinza (R = G = B) preto = 0; branco = bit (imagem binarizada): preto = 0; branco = 1.")
5
Operações sobre imagens
O espaço das imagens no plano é um espaço vetorial Classificação em relação ao escopo de atuação Local: T(p) depene do comportamento de uma vizinhança de p Pontual: T(p) depende apenas do valor de p Operações unárias são chamadas de filtros
 depene do comportamento de uma vizinhança de p. Pontual: T(p) depende apenas do valor de p. Operações unárias são chamadas de filtros.")
6
Filtros Extrema importância em tratamento de imagens
Baseados na teoria de sinais Tipos Lineares (transformação linear) x não-lineares Estatísticos x determinísticos Filtros de amplitude x topológicos Filtros de amplitude: operam nas cores Topológicos: operam na estrutura da imagem
 x não-lineares. Estatísticos x determinísticos. Filtros de amplitude x topológicos. Filtros de amplitude: operam nas cores. Topológicos: operam na estrutura da imagem.")
7
Convolução Sendo h a função de resposta de impulso de um filtro L, a aplicação do filtro sobre uma imagem f é obtida pela convolução: Versão discretizada: h geralmente é representada por uma matriz chamada de máscara do filtro

8
Convolução (2) Na prática (máscara 3x3): Algoritmo caro
0 := 0.0’ + 1.1’ + 2.2’ + 3.3’ + 4.4’ + 5.5’ + 6.6’ + 7.7’ + 8.8’ Algoritmo caro pode ser reduzido utilizando-se transformada de Fourier

9
Ex.: Filtro Gaussiano Faz uma média ponderada com os pixels vizinhos
Suaviza a imagem
![]()
10
Imagem Direcional / Campo de Orientação
Imagem com a direção de blocos de pixels Obtém-se informações de uma impressão digital através da direção das cristas Remoção de minúcias falsas Classificação nos grupos de Henry Fácil de atenuar ruído Baseia-se nos gradientes (derivadas parciais) da imagem
 da imagem.")
11
Gradiente Definição: Gradiente discreto (4 métodos):
Gx(j, k) = ½ i(j + 1, k) – ½ i(j – 1, k) Gx(j, k) = i(j + 1, k) – i(j, k) Gx(j, k) = i(j, k) – i(j – 1, k) Gx(j, k) = i(j + 1, k + 1) – i(j, k) Gy(j, k) = i(j, k + 1) – i(j + 1, k)
 = ½ i(j + 1, k) – ½ i(j – 1, k) Gx(j, k) = i(j + 1, k) – i(j, k) Gx(j, k) = i(j, k) – i(j – 1, k) Gx(j, k) = i(j + 1, k + 1) – i(j, k) Gy(j, k) = i(j, k + 1) – i(j + 1, k)")
12
Imagem Direcional (método 1)
Cálculo da direção do pixel (i, j): Cálculo do índice de consistência da imagem direcional em um bloco de pixels (i, j): Se este índice está acima de um limite, a imagem direcional é recalculada nesse bloco utilizando uma resolução menor
: Cálculo do índice de consistência da imagem direcional em um bloco de pixels (i, j): Se este índice está acima de um limite, a imagem direcional é recalculada nesse bloco utilizando uma resolução menor.")
13
Image Direcional (método 2)
Calculam-se as grandezas direcionais S1, ..., S7 Sp = min {Si | i=1,...7} Sq = max {Si | i=1,...,7} Direção (depende da cor do pixel)
")
14
Suavização da Imagem Direcional
A direção é obtida para grupos de 9 pixels (3x3) e não pixels individuais Métodos: Moda: valor para o grupo é o valor mais freqüente Seno-cosseno: média dos vetores da forma (cos2a, sen2a)
 e não pixels individuais. Métodos: Moda: valor para o grupo é o valor mais freqüente. Seno-cosseno: média dos vetores da forma (cos2a, sen2a)")
15
Avaliação de um AFIS FAR (False Acceptance Rate)
FRR (False Rejection Rate) EER (Equal Error Rate) Valor para o qual FAR = FRR Boa medida de qualidade FBI: classificação boa se FRR = 20% FAR = 1%
 EER (Equal Error Rate) Valor para o qual FAR = FRR. Boa medida de qualidade. FBI: classificação boa se. FRR = 20% FAR = 1%")
16
Passos para Classificação
Cálculo da imagem direcional Identificação dos pontos singulares Índice de Poincaré Classificação

17
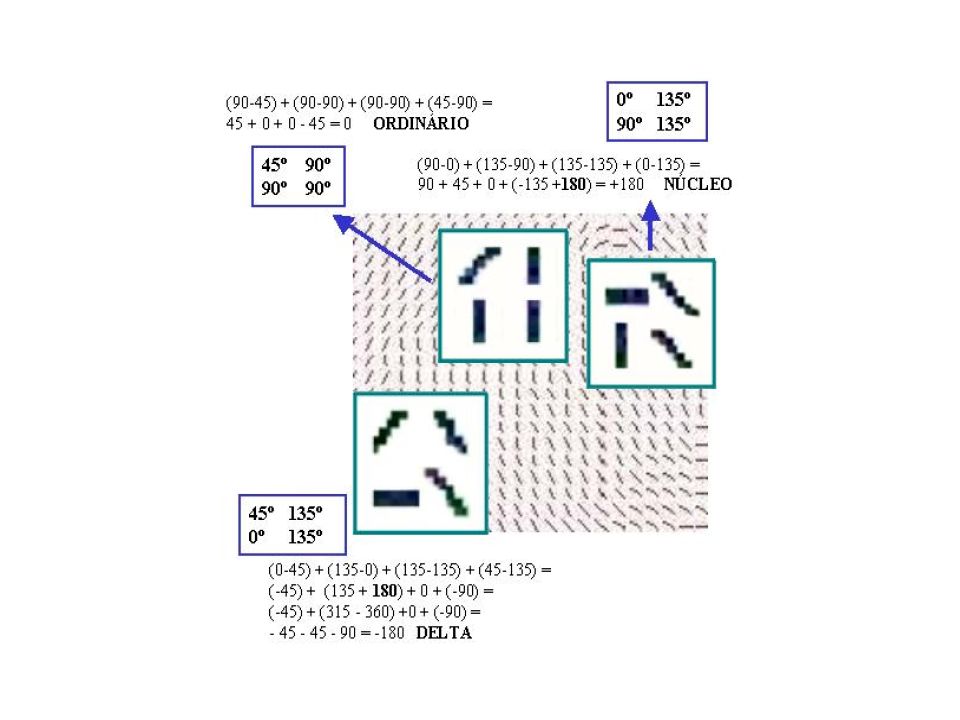
Cálculo do índice de Poincaré
Toma-se uma curva fechada em torno dos blocos de pixels Calcula-se o somatório (S) das diferenças entre ângulos consecutivos no sentido anti-horário S > 90° S := S – 180° S < -90º S := S + 180° Delta -180° Núcleo 180° Ordinário 0° Tipo de ponto Somatório
 das diferenças entre ângulos consecutivos no sentido anti-horário. S > 90° S := S – 180° S < -90º S := S + 180° Delta. -180° Núcleo. 180° Ordinário. 0° Tipo de ponto. Somatório.")
19
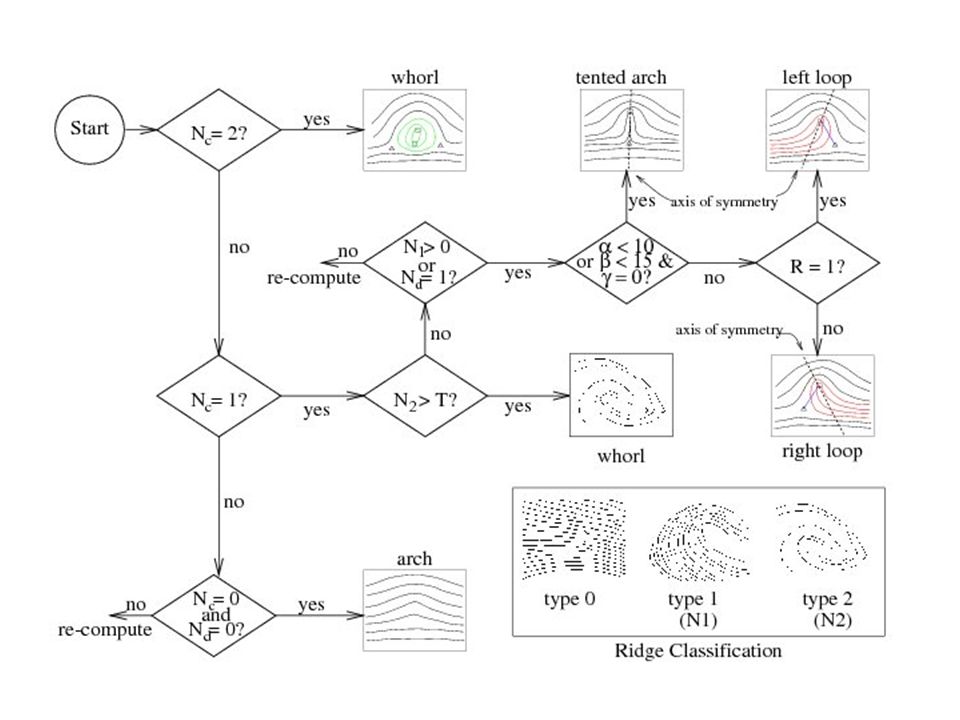
Classificação Atribui-se então uma classe com base no número de pontos singulares Nenhum ponto: arco Um núcleo e um delta: arco angular ou presilha Necessário calcular a direção do vetor núcleo-delta Dois núcleos e deltas: verticilo Mais de dois núcleos ou deltas: necessário suavizar imagem direcional (ex.: filtro gaussiano) Usando as duas técnicas combinadas, obtém-se 12,5% de erro. Utilizando uma mesma classe para arco e arco angular, obtém-se erro de 7,7%
 Usando as duas técnicas combinadas, obtém-se 12,5% de erro. Utilizando uma mesma classe para arco e arco angular, obtém-se erro de 7,7%")
21
Passos para Verificação
Pré-processamento Binarização Afinamento Detecção de minúcias Comparação com a base de dados

22
Binarização (Thresholding)
Transformação de uma imagem de tons de cinza em preto/branco (imagem binária) Ex.: limiar de 128 (cinza 50%) Pixels com cor >= 128 serão pintados de preto Pixes com cor < 128 serão pintados de branco Thresholding adaptativo: transformação feita por blocos (8x8 ou 10x10) valor de limiar (T) é calculado pela média dos tons de cinza do bloco imagem pode ter regiões mais claras/escuras
 Ex.: limiar de 128 (cinza 50%) Pixels com cor >= 128 serão pintados de preto. Pixes com cor < 128 serão pintados de branco. Thresholding adaptativo: transformação feita por blocos (8x8 ou 10x10) valor de limiar (T) é calculado pela média dos tons de cinza do bloco. imagem pode ter regiões mais claras/escuras.")
23
Afinamento Obtenção da estrutura das cristas com dimensão unitária, facilitando a extração das minúcias Requisitos: A conectividade das linhas da imagem original deve ser preservada A imagem deve conter o mínimo de pixels necessários para manter-se 8-conectada Cristas finais próximas devem ser mantidas próximas As linhas resultantes devem estar aproximadamente no centro das linhas originais Reentrâncias inseridas na imagem devem ser minimizadas

24
Afinamento (2) Cortam-se as bordas até obter dimensão 1
Atribui-se um estado intermediário aos pixels a serem apagados Evitar erosão O número máximo de pixels conectados na vizinhança é 1 O comprimento máximo das cadeias de pixels (tanto pretos como brancos) 4-conectados deve ser maior que 1 Manter cristas finais Ao final de uma iteração, pixels apagados são pintados de branco Iterações até nenhum pixel ser apagado
 4-conectados deve ser maior que 1. Manter cristas finais. Ao final de uma iteração, pixels apagados são pintados de branco. Iterações até nenhum pixel ser apagado.")
25
Detecção de Minúcias Cálculo do Crossing Number (CN)
Pixel é uma bifurcação se possui 3 pontos vizinhos Pixel é crista final se possui apenas 1 ponto vizinho Armazena-se, então: Tipo da minúcia Direção e distância ao ponto singular (geralmente o núcleo) Direção da crista que contém a minúcia
 Direção da crista que contém a minúcia.")
26
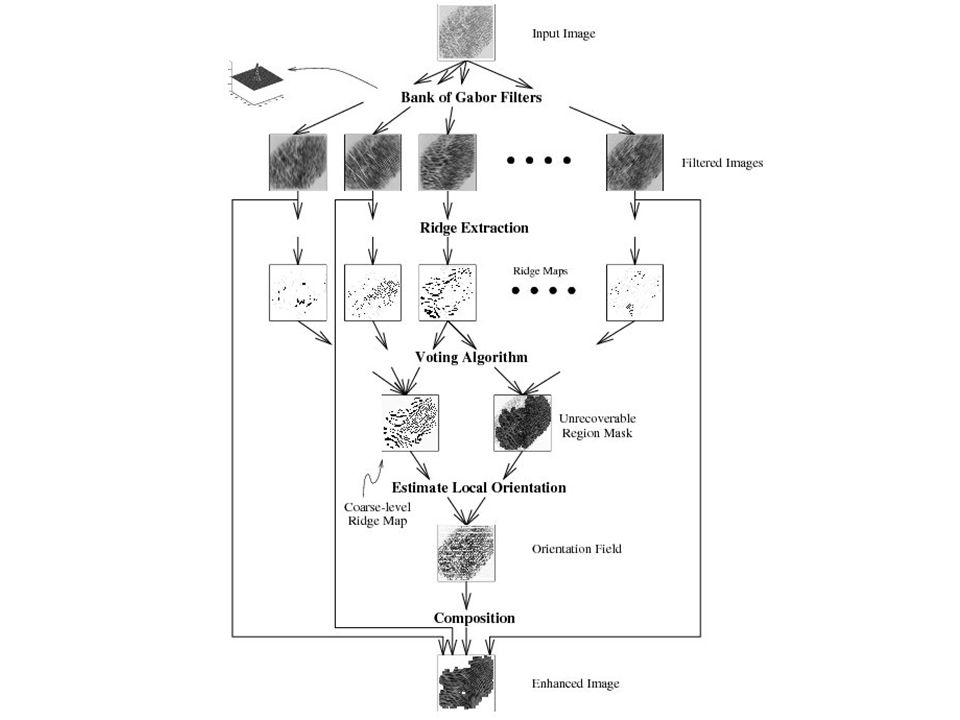
Banco de filtros de Gabor
O filtro de Gabor seleciona regiões da imagem que têm uma direção preferencial Pode ser utilizado para remover minúcias falsas, formadas devido à má qualidade da imagem

28
Método Sintático de Verificação
Trata-se a seqüência de registros de minúcias como uma string Aplicam-se transformações (edições: inserções, deleções) sobre a string candidata a fim de obter a string do BD Calcula-se o mínimo de transformações necessárias (programação dinâmica) Gera-se um índice de similaridade Imagem aceita se o índice é maior que um limite estabelecido (threshold) FRR = 19,5% FAR = 0,003%
 sobre a string candidata a fim de obter a string do BD. Calcula-se o mínimo de transformações necessárias (programação dinâmica) Gera-se um índice de similaridade. Imagem aceita se o índice é maior que um limite estabelecido (threshold) FRR = 19,5% FAR = 0,003%")
29
Bibliografia Costa, S.M.F. Classificação e Verificação de Impressões Digitais Crane, R. A Simplified Approach to Imagem Processing Gomes, J.; Velho, L. Computação Gráfica: Imagem Jain, A.; Pankanti, S. Fingerprint Classification and Matching Prasad, V.S.N.; Domke, J. Gabor Filter Visualization Seul, M.; O’Gorman, L.; Sammon, M.J. Practical Algorithms for Image Analysis



>")









>")

>")





