Carregar apresentação
A apresentação está carregando. Por favor, espere

1
André Giovani Leal Furlan

2
Definição Defini-se MOTOR DE PASSO como um “atuador incremental eletromagnético”. Converte “pulsos digitais de entrada” em movimentos angulares em seu eixo. O motor de passo é um transdutor que converte energia elétrica em movimento controlado através de pulsos, o que possibilita o deslocamento por passo, onde passo é o menor deslocamento angular.

3
Características importantes
Deslocamento angular diretamente proporcional ao número de pulsos de entrada Erro angular por passo pequeno ( 5% do passo) e não acumulativo Possibilita trabalho em “malha aberta” Digitais Capacidade de trabalho em baixíssimas freqüências de Sistemas Retenção de posição sem uso de freio, etc...
 e não. acumulativo. Possibilita trabalho em malha aberta Digitais. Capacidade de trabalho em baixíssimas freqüências. de Sistemas. Retenção de posição sem uso de freio, etc...")
4
Aplicações Aplicações onde se exige alta precisão: os constituintes mecânicos da informática e a robótica.

5
Motores Mais Comuns Motor 1 2 3 4 5 Graus/passo 0,9º 1,8º 3,6º 7,5 º
15º Passos/volta 400 200 100 48 24

6
Curva Característica

7
Tipos de Motor de Passo Relutância Variável Imãs Permanentes Unipolar
Bipolar

8
Relutância Variável 4 enrolamentos e 24 passos
Note: Quando alimentamos a fase 2 temos uma rotação de 15º

9
Motor à Imãs Permanentes
Eles são constituídos de um estator bobinado e um rotor magnético (imã bipolar). Esta categoria de motor se subdivide em dois tipos: o motor unipolar e o motor bipolar. Os quatro desenhos à direita representam quando as bobinas são alimentadas a fim de girar o rotor: primeiramente a bobina A, depois B, depois C e enfim D. O pólo norte do rotor é atraído pelo pólo sul do estator, pólo criado pela circulação de uma corrente na bobina. .
. Esta categoria de motor se subdivide em dois tipos: o motor unipolar e o motor bipolar. Os quatro desenhos à direita representam quando as bobinas são alimentadas a fim de girar o rotor: primeiramente a bobina A, depois B, depois C e enfim D. O pólo norte do rotor é atraído pelo pólo sul do estator, pólo criado pela circulação de uma corrente na bobina. .")
10
Motor Bipolar Este tipo de motor necessita um comando mais complexo que aquele do motor unipolar, a corrente deve mudar de sentido nos enrolamentos a cada passo efetuado.

11
Motor Bipolar ( Passo Completo)
. Passo 1 Passo 2 Passo 3 Passo 4 Bobina A Bobina B + –

12
Motor Bipolar ( Máximo Conjugado)
. Passo 1 Passo 2 Passo 3 Passo 4 Bobina A Bobina B + –

13
Motor Bipolar ( Semi Passo)
.

14
Motor unipolar e seqüência simples
A fim de inverter o sentido da corrente, os enrolamentos são feitos por meio de dois fios onde uma das extremidades é ligada no “+” ou no “-“ da alimentação. Motor unipolar e seqüência simples

15
Motor Unipolar (Passo Simples)
. Passo 2 Passo 1 Passo 4 Passo 3

16
Controle do Motor de Passo
Motores de Passo Unipolares de Quatro Fases de Ímã Permanente (5 ou 6 fios) 1º- Possuir um motor de passo Encontrado em impressoras, scanners, drives de disco e etc. 2º-Identificar as bobinas 3º-Circuito de Controle 4º-Sequência de controle
 1º- Possuir um motor de passo. Encontrado em impressoras, scanners, drives de disco e etc. 2º-Identificar as bobinas. 3º-Circuito de Controle. 4º-Sequência de controle.")
17
Como identificar as bobinas?
Um método indicado na identificação dos fios de alimentação é medir a resistência elétrica entre todos eles dois a dois.

18
Circuito de Controle .

19
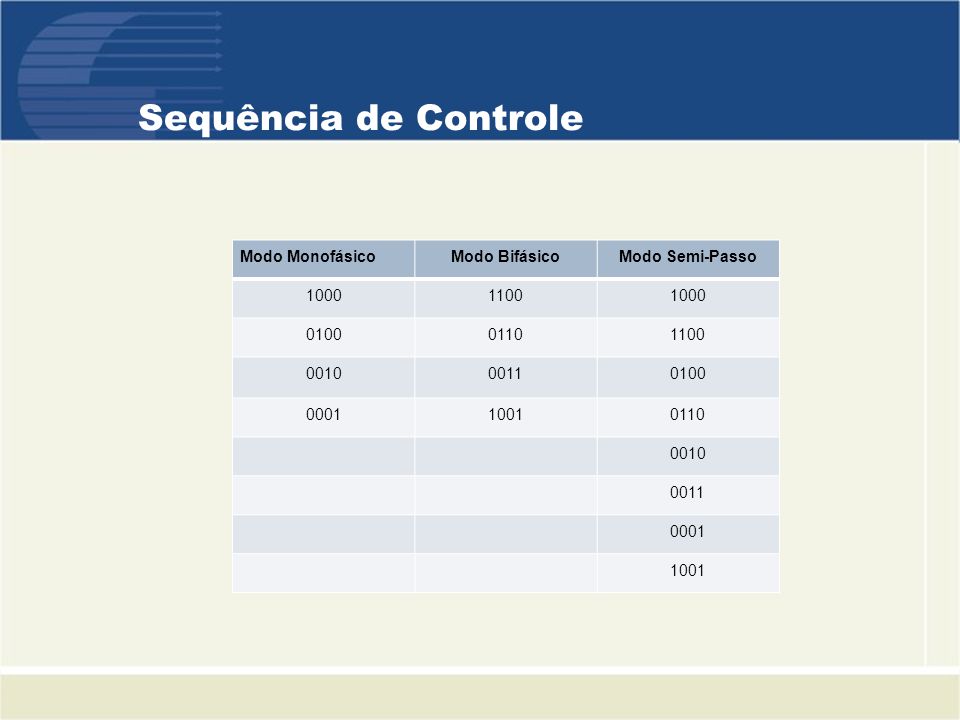
Sequência de Controle Modo Monofásico Modo Bifásico Modo Semi-Passo
1000 1100 0100 0110 0010 0011 0001 1001
20
Controle do Motor Bipolar
. L298

21
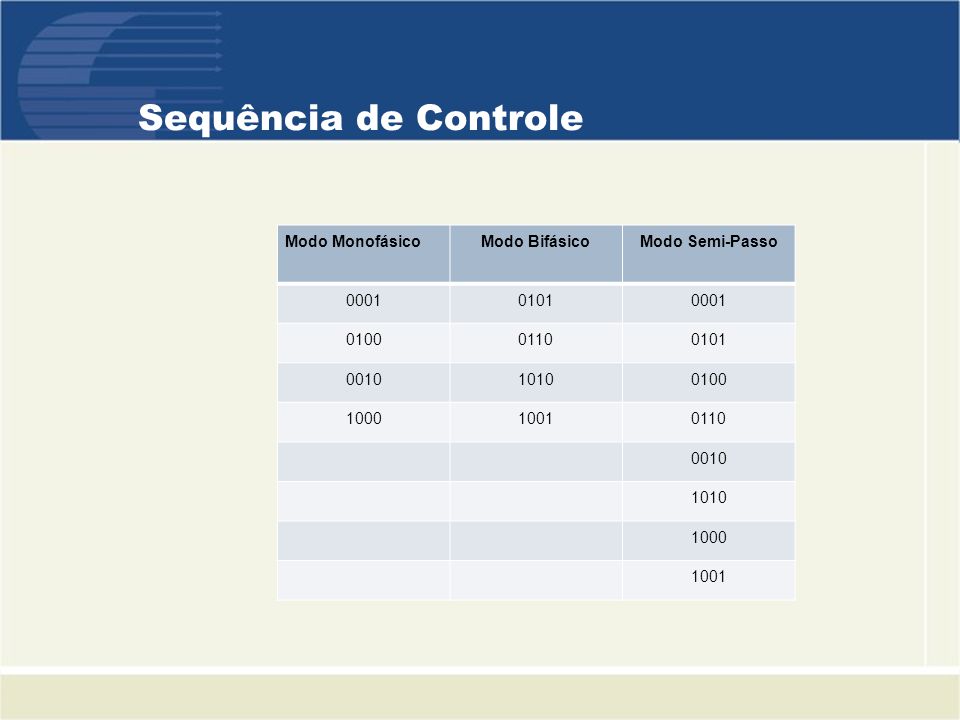
Sequência de Controle Modo Monofásico Modo Bifásico Modo Semi-Passo
0001 0101 0100 0110 0010 1010 1000 1001
22
Obrigado! FIM

Apresentações semelhantes



















