Carregar apresentação
A apresentação está carregando. Por favor, espere

1
AULA 2 MOTOR DE INDUÇÃO CA

2
Vida Útil do Motor O motor elétrico de indução de corrente alternada é uma máquina robusta. Ao contrário dos motores de corrente contínua, exige pouca manutenção preventiva. Entretanto, o fator mais significante para a redução da vida do motor de indução é sua temperatura de trabalho.

3
Vida Útil do Motor Um simples acréscimo de 10 ºC, por exemplo, acima da temperatura nominal, pode reduzir a vida da máquina pela metade. Por essa razão os fabricantes tomam alguns cuidados na fabricação, além de indicar outros na instalação. Um deles é o sensor de temperatura, alocado na cabeça de uma das bobinas. Geralmente este componente é um PTC, que aumenta a sua resistência segundo um aumento de temperatura. Estrategicamente, o PTC é ligado em série com a bobina do comando, de forma a “desarmá-la” ao atingir temperaturas críticas. Muitas vezes, além do PTC interno, o fabricante aconselha o uso de relés térmicos externos (na instalação).
.")
4
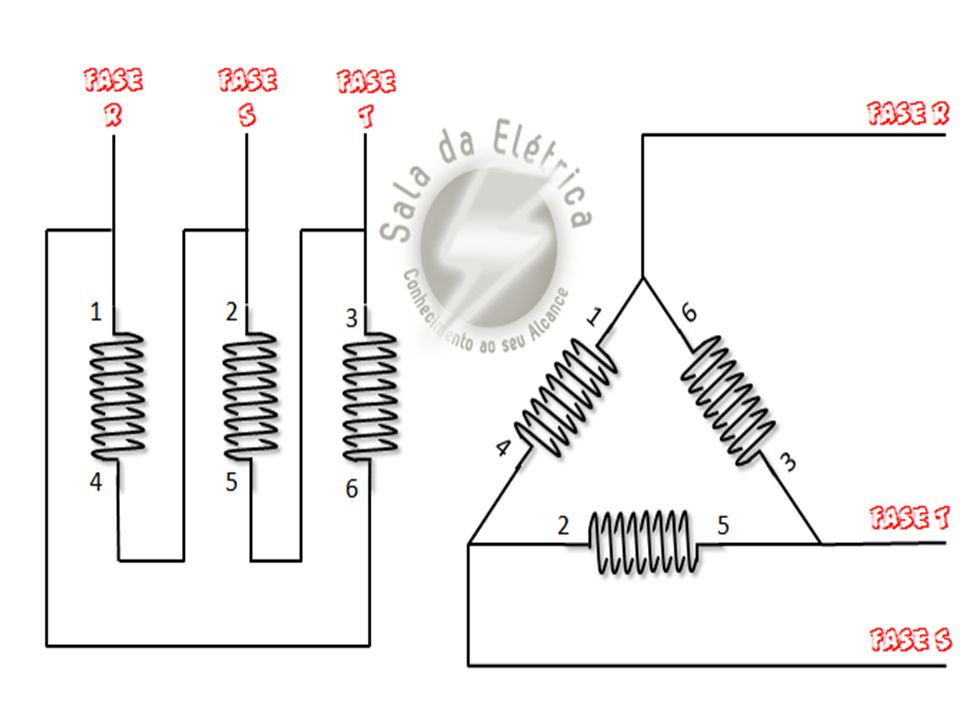
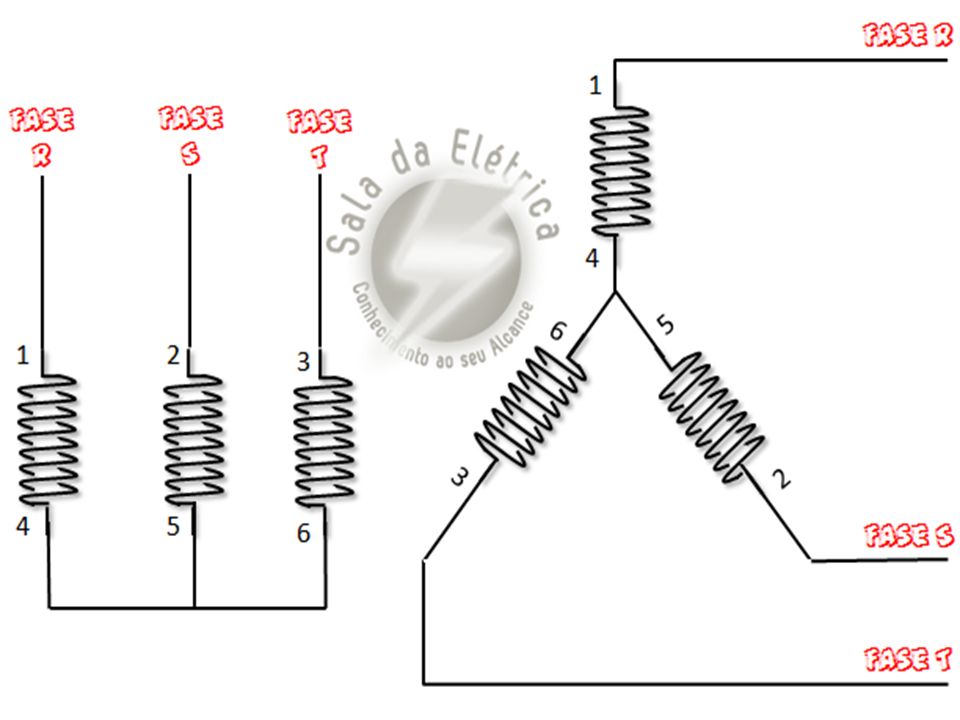
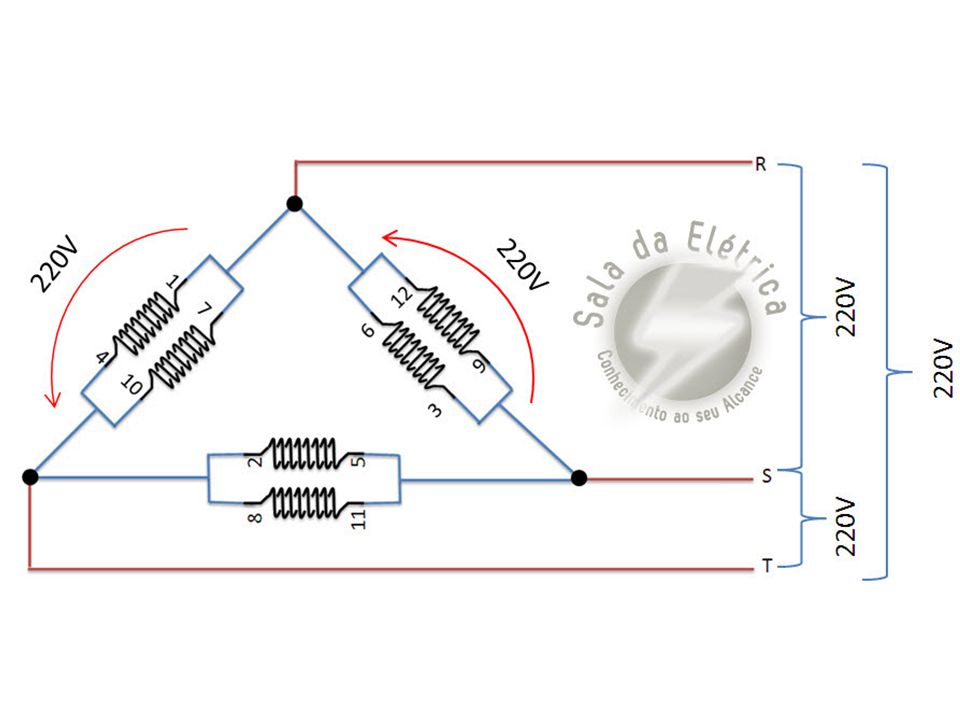
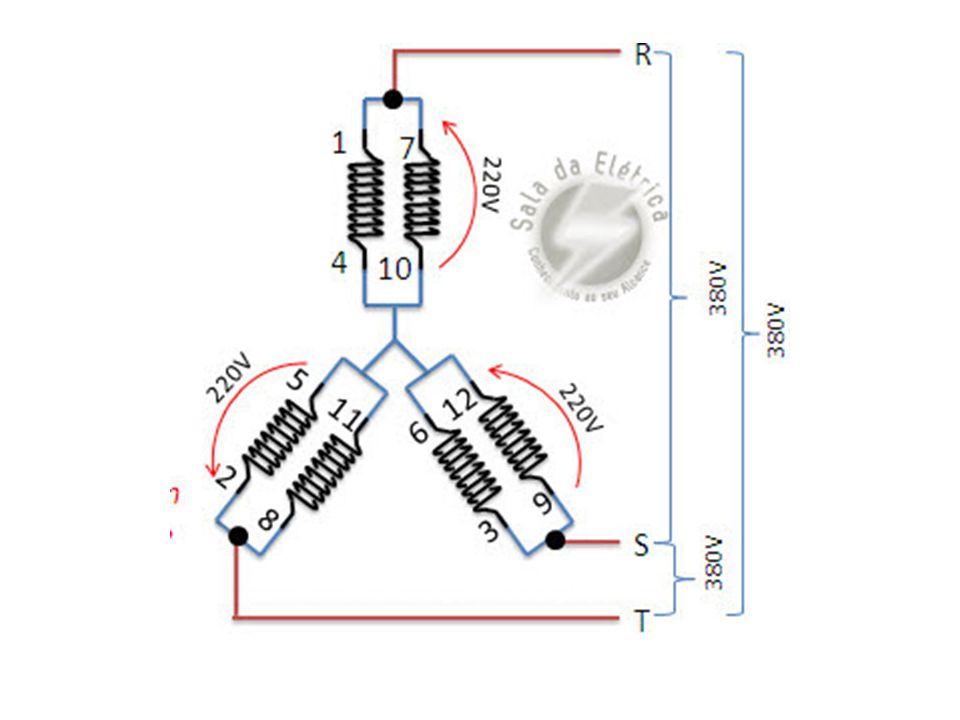
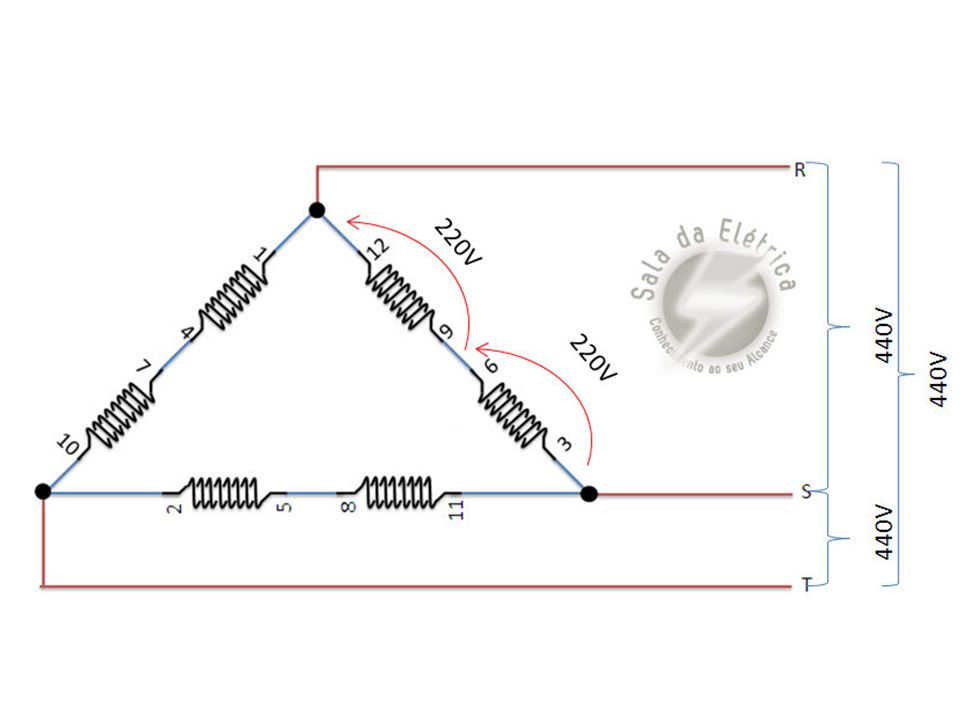
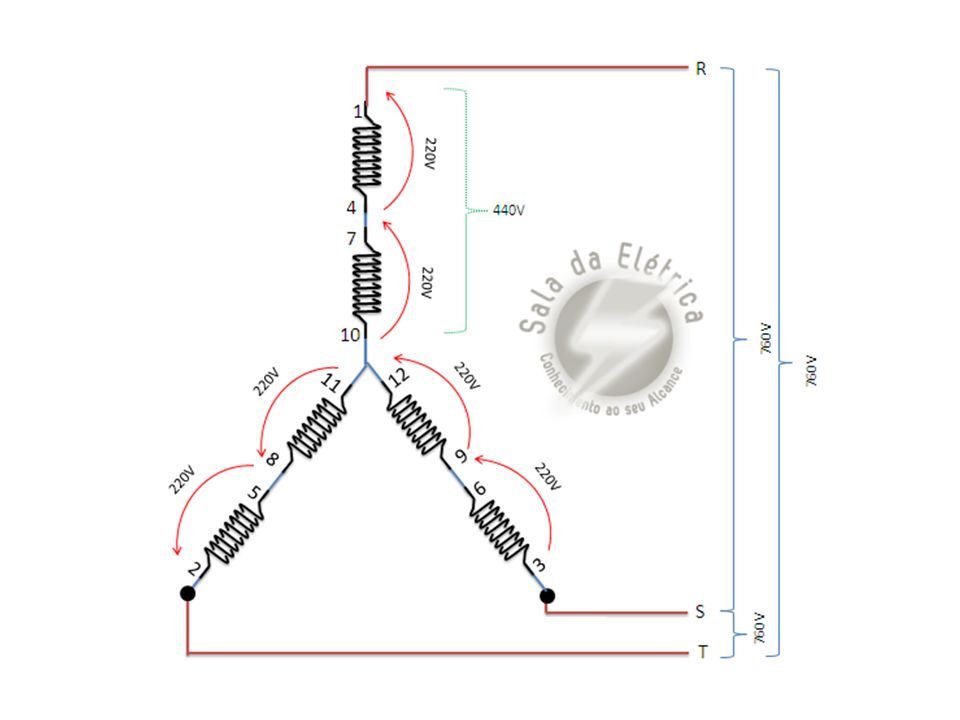
Trataremos sobre os tipos de fechamentos dos enrolamentos de motores elétricos trifásicos com seis terminais (motor 6 pontas). Lembre-se que o motor fornece a opção de seis terminais para permitir a alimentação através de dois níveis distintos, por exemplo 220V e 380V. E o de 12 pontas 220V, 380V, 440V, 760V. Fechamento em triângulo e/ou duplo triângulo Fechamento em estrela e/ou duplo estrela

11
CONSTITUIÇÃO DE MOTORES DE INDUÇÃO
CIRCUITO MAGNETICO ESTATICO: ESTATOR ONDE SE LOCALIZA A CARCAÇA, CONSTITUI O SUPORTE DE FIXAÇÃO DO CONJUNTO. BOBINAS: CONFORME O GRUPO DISPOSTO PODE SER MONOFASICO OU POLIFASICO. ROTOR: NUCLEO FERROMAGNETICO LAMINADO

15
Introdução Motores Síncronos
O motor síncrono é um tipo de motor elétrico muito útil e confiável com uma grande aplicação na indústria. Entretanto, pelo fato do motor síncrono ser raramente usado em pequenas potências, muitos que se sentem bem acostumados com o motor de indução por causa de suas experiências com acionadores menores, se tornam apreensivos quando se deparam com a instalação de um motor síncrono nos seus sistemas.

16
Tipos de Motores síncronos
Máquina síncrona convencional com excitatriz interna: Os enrolamentos de campo são alimentados com corrente contínua a partir de um gerador interno também conhecido por excitatriz, acoplado diretamente ao eixo da máquina. Neste tipo de máquina não há escovas reduzindo então as manutenções. Máquina síncrona com ímã permanente: Não há enrolamentos de campo, que são substituídos por ímãs permanentes de alto produto energético. Não possui igualmente escovas ou fonte de tensão contínua, reduzindo com isto manutenções, aumentando o rendimento e com melhor relação torque. Máquina síncrona de relutância: Neste tipo de máquina, não há enrolamentos de campo. O rotor é construído com saliências (polos salientes) que, devido ao efeito da mínima relutância, giram em sincronismo com o campo girante do estator.
 que, devido ao efeito da mínima relutância, giram em sincronismo com o campo girante do estator.")
17
Diferenças entre síncronos e assíncronos
O motor síncrono é bastante semelhante ao motor de indução (assíncrono) no seu aspecto geral, embora usualmente os motores síncronos possuam potência elevada e/ou rotação muito baixa quando comparado com o motor de indução normal. Motor síncrono: Funciona com velocidade fixa, utilizado somente para grandes potências (devido ao seu alto custo em tamanhos menores) ou quando se necessita de velocidade invariável.
 no seu aspecto geral, embora usualmente os motores síncronos possuam potência elevada e/ou rotação muito baixa quando comparado com o motor de indução normal. Motor síncrono: Funciona com velocidade fixa, utilizado somente para grandes potências (devido ao seu alto custo em tamanhos menores) ou quando se necessita de velocidade invariável.")
18
Razões mais comuns para se especificar motores síncronos são:
1. Baixo custo inicial. 2. Obter altos rendimentos. 3. Obter correção de fator de potência. 4. Obter características de partida especiais.

19
Tipos de motores Assíncronos
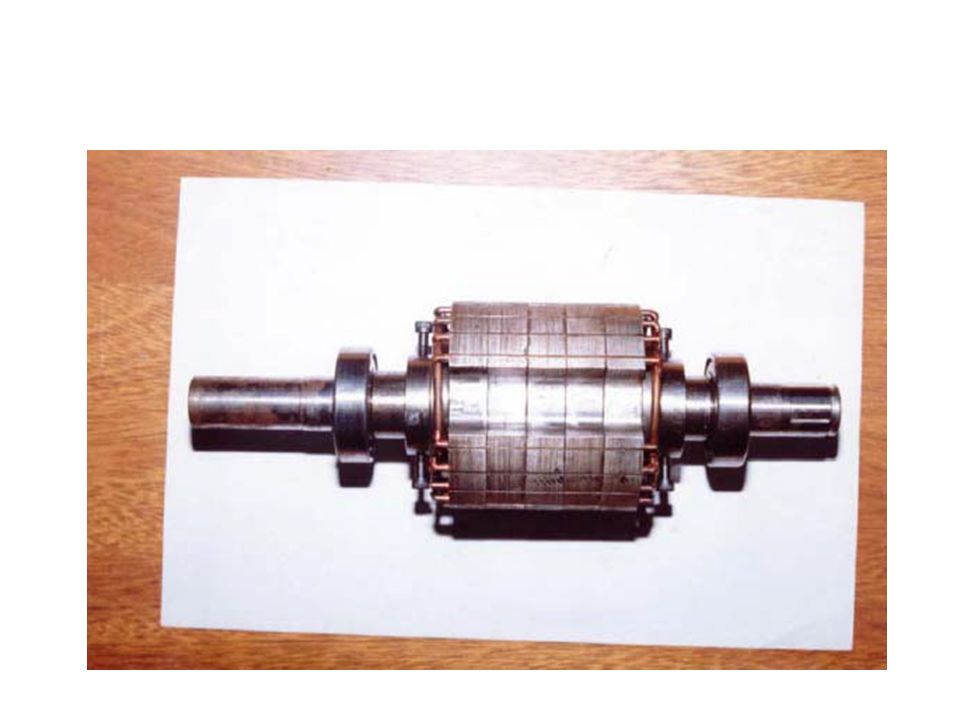
Gaiola de Esquilo - Este é o motor mais utilizado na indústria atualmente. Tem a vantagem de ser mais econômico em relação aos motores monofásicos tanto na sua construção como na sua utilização. Além disso, escolhendo o método de arranque ideal, tem um leque muito maior de aplicações. O rotor em gaiola de esquilo é constituído por um núcleo de chapas ferromagnéticas, isoladas entre si, sobre o qual são colocadas barras de alumínio (condutores), dispostos paralelamente entre si e unidas nas suas extremidades por dois anéis condutores, também em alumínio, que curto-circuitam os condutores.
, dispostos paralelamente entre si e unidas nas suas extremidades por dois anéis condutores, também em alumínio, que curto-circuitam os condutores.")
20
Motor de Indução Monofásico

21
Motor de Indução Monofásico
Geralmente menores que 5Hp Baixo torque de partida O campo girante é obtido através de um enrolamento auxiliar O enrolamento auxiliar é desconectado por uma chave centrífuga, que opera, em geral, quando o motor atinge 75% da velocidade síncrona Um capacitor de partida pode ser usado em série com o enrolamento auxiliar para aumentar o torque

22
Motor de Indução Monofásico

23
Motor de Indução Monofásico Conexões para Operação em 220 e 127V

24
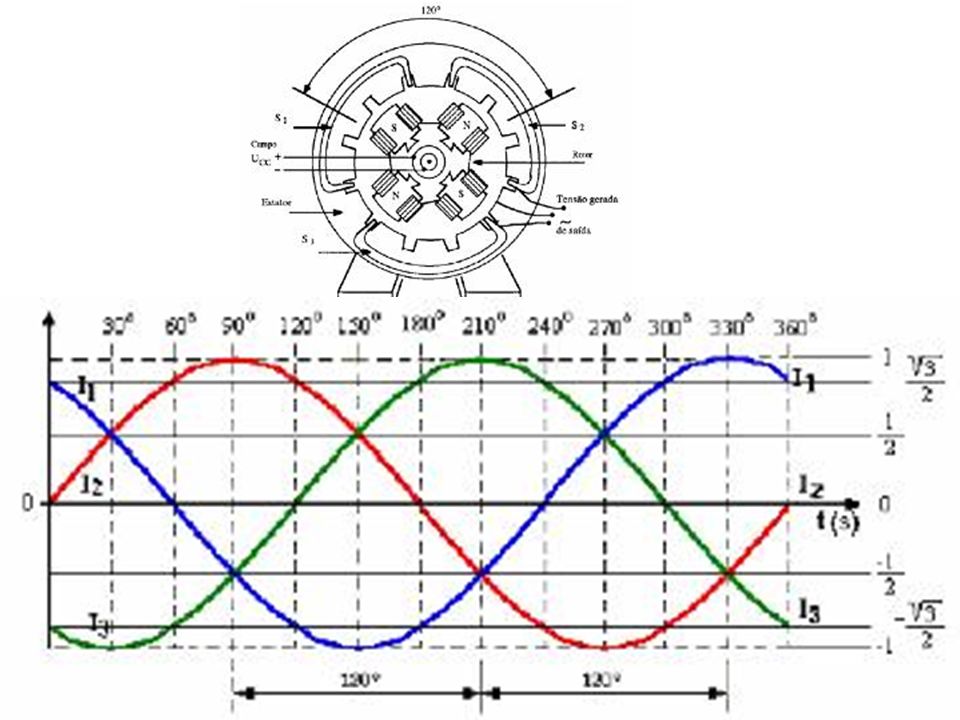
Sistema Trifásico É a forma mais comum de geração, transmissão e distribuição de energia elétrica em corrente alternada. Este sistema incorpora o uso de três ondas senoidais balanceadas, defasadas em 120 graus entre si, de forma a balancear o sistema, tornando-a muito mais eficiente ao se comparar com três sistemas isolados. As máquinas elétricas trifásicas tendem a ser mais eficientes pela utilização plena dos circuitos magnéticos. As linhas de transmissão permitem a ausência do neutro, e o acoplamento entre as fases reduz significantemente os campos eletromagnéticos. Finalmente, o sistema trifásico permite a flexibilidade entre dois níveis de tensão.

25
SISTEMA TRIFÁSICO Os geradores síncronos são trifásicos e são projetados de forma que as tensões geradas sejam senoidais e simétricas, isto é, tensões de módulos iguais e defasadas entre sí de 3/2Π radianos.

27
Rendimento do Motor Um diagrama de fluxo de potencia é representado abaixo: Então, o rendimento é obtido por: x 100%

28
1 hp = 1,0138 cv = 745,7 W 1 cv = 0,9863 hp = 735,5 W.

29
Rendimento Um motor trifásico de 10CV, ligado na rede 220V consome 26A (como já disse, esse dado vc. pode considerar o valor teórico fornecido na placa do motor ou no catálogo do fabricante ou, o melhor mesmo seria usar um Amperímetro e medir a corrente do motor. Se vc. for efetuar a medição não se esqueça que a carga mecânica esteja acoplada ao eixo do motor . Ainda segundo a placa do motor, seu fator de potência é 0,87. Considerando esses dados pode-se calcular seu consumo do seguinte modo P = 1,73 x 220V x 26A x 0,87 P = 8619 W = 8,62 KW (potência consumida na rede) A potência disponível no eixo pelo motor é de 10CV. Como 1CV = 736 W, então 10 CV = 7360W = 7,36 KW. Assim, o rendimento do motor pode ser obtido do seguinte modo: 7,36 KW / 8,62 KW x 100 = 85,38 %. Isso significa que quase 15% da energia entregue ao motor está sendo convertida numa outra forma de energia
 A potência disponível no eixo pelo motor é de 10CV. Como 1CV = 736 W, então 10 CV = 7360W = 7,36 KW. Assim, o rendimento do motor pode ser obtido do seguinte modo: 7,36 KW / 8,62 KW x 100 = 85,38 %. Isso significa que quase 15% da energia entregue ao motor está sendo convertida numa outra forma de energia")
30
Velocidade Síncrona O Motor de indução funciona normalmente com velocidade constante proporcionada pelo campo magnético girante, logo a velocidade do campo é chamada de velocidade síncrona, e é em função de, basicamente, dois fatores, são eles: Polos Magnéticos gerados em função de sua construção física Frequência da rede elétrica a qual está instalado

31
Velocidade Síncrona Portanto, dizemos que: A velocidade do motor elétrico de indução é diretamente proporcional a frequência e inversamente proporcional a quantidade de pólos magnéticos

32
Exemplo Um motor elétrico trifásico possui as seguintes especificações: Tensão: 220VCA – 3Ø – 60Hz Polos Magnéticos: 4 Polos

33
Escorregamento Alguns fatores faz com que a velocidade real no eixo do motor deixe de ser exatamente a velocidade do campo magnético girante, por exemplo, esta velocidade varia ligeiramente com a carga mecânica aplicada a seu eixo, etc… Por natureza, o motor elétrico trifásico possui uma diferença entre a velocidade do campo magnético girante (Ns) e a velocidade real em seu rotor (N) este fato se dá em função de um fenômeno chamado escorregamento
 e a velocidade real em seu rotor (N) este fato se dá em função de um fenômeno chamado escorregamento.")
34
Escorregamento É fornecido pelo fabricante do motor podendo variar de motor para motor. Na maioria das vezes este fenômento é descrito pelo fabricante em (%). Temos a seguinte fórmula para representar o escorregamento do motor elétrico trifásico:
. Temos a seguinte fórmula para representar o escorregamento do motor elétrico trifásico:")
35
Vejamos a seguir um exemplo de cálculo de escorregamento:
Motor elétrico trifásico 220VCA Velocidade síncrona: 1800 RPM (4 polos – 60Hz) Velocidade medida no rotor: 1760 RPM Calcular o escorregamento em porcentagem e RPM
 Velocidade medida no rotor: 1760 RPM. Calcular o escorregamento em porcentagem e RPM.")
36
Sendo assim a velocidade real no eixo do motor elétrico será a diferença entre a velocidade síncrona e o escorregamento. Esta recebe o nome de Velocidade Nomina

37
Escorregamento VELOCIDADE SINCRONA Ns=120*f/P P Nº DE POLOS

38
Conjugado de partida É o torque ou força de Arranque para a partida de um motor elétrico. Por ter que vencer a inércia do motor parado, esse conjugado de partida é sensivelmente maior do que o valor nominal de conjugado para a velocidade normal do motor. O conjugado não é constante do movimento da partida até que a velocidade nominal seja alcançada

39
Conjugado de partida . Essa variação chama-se curva de conjugado, cujos valores são expressos em porcentagem em relação ao conjugado original, ou seja, com relação ao conjugado na velocidade a plena carga. Cada motor tem sua própria curva de conjugado. Essa curva varia com a potência e a velocidade do motor. Assim, em motores de velocidade e potência iguais, mas de fabricantes diferentes, geralmente a curva do conjugado é diferente.

40
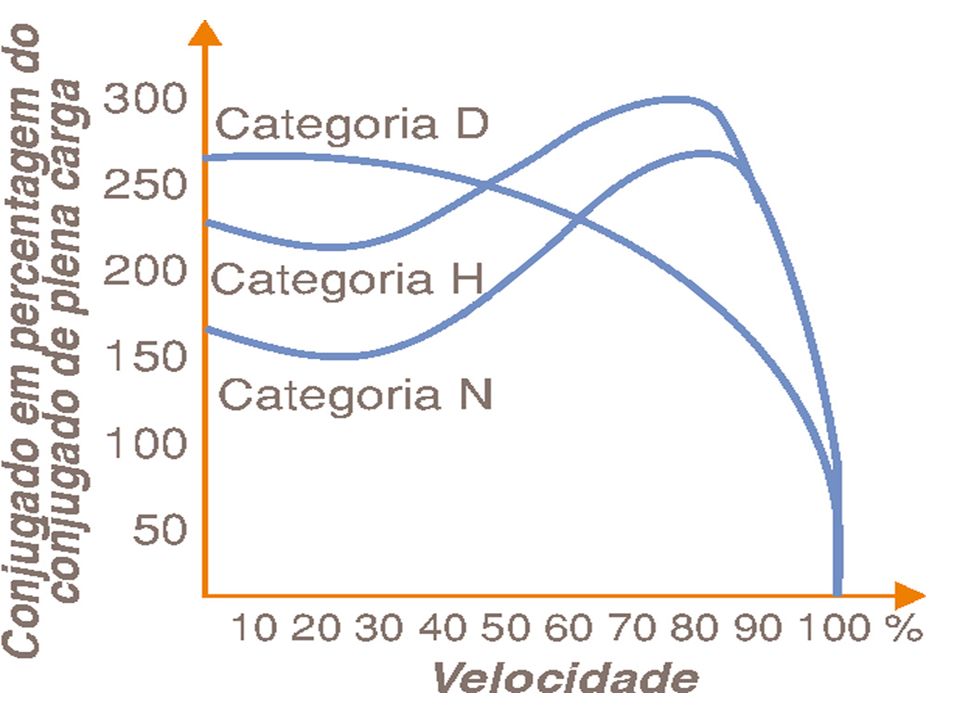
Conjugado de partida Conforme as suas características de conjugado em relação à velocidade e corrente de partida, os motores de indução trifásicos com rotor de gaiola, são classificados em categorias, cada uma adequada a um tipo de carga. Estas categorias são definidas em norma (NBR 7094), e são as seguintes:
, e são as seguintes:")
41
Conjugado de partida Categoria N Conjugado de partida normal, corrente de partida normal; baixo escorregamento. Constituem a maioria dos motores encontrados no mercado e prestam-se ao acionamento de cargas normais, como bombas, máquinas operatrizes, ventiladores. Categoria H Conjugado de partida alto, corrente de partida normal; baixo escorregamento. Usados para cargas que exigem maior conjugado na partida, como peneiras, transportadores carregadores, cargas de alta inércia, britadores, etc.

42
Conjugado de partida Categoria D Conjugado de partida alta, corrente de partida normal; alto escorregamento (+ de 5%). Usados em prensas excêntricas e máquinas semelhantes, onde a carga apresenta picos periódicos. Usados também em elevadores e cargas que necessitam de conjugados de partida muito altos e corrente de partida limitada.
. Usados em prensas excêntricas e máquinas semelhantes, onde a carga apresenta picos periódicos. Usados também em elevadores e cargas que necessitam de conjugados de partida muito altos e corrente de partida limitada.")
43
Conjugado de partida Categoria NY Esta categoria inclui os motores semelhantes aos de categoria N, porém, previstos para partida estrela-triângulo. Para estes motores na ligação estrela, os valores mínimos do conjugado com rotor bloqueado e do conjugado mínimo de partida são iguais a 25% dos valores indicados para os motores categoria N.

44
Conjugado de partida Categoria HY Esta categoria inclui os motores semelhantes aos de categoria H, porém. previstos para partida estrela-triângulo. Para estes motores na ligação estrela, os valores mínimos do conjugado com rotor bloqueado e do conjugado mínimo de partida são iguais a 25% dos valores indicados para os motores de categoria H.

Apresentações semelhantes