Carregar apresentação
1
Localização de Pessoas e Objetos ( Projeto Location Stack)
Francisco Eduardo Moura PUC-Rio 2003.2

2
Localização de Pessoas e Objetos
Introdução Sistemas de localização Location Stack

3
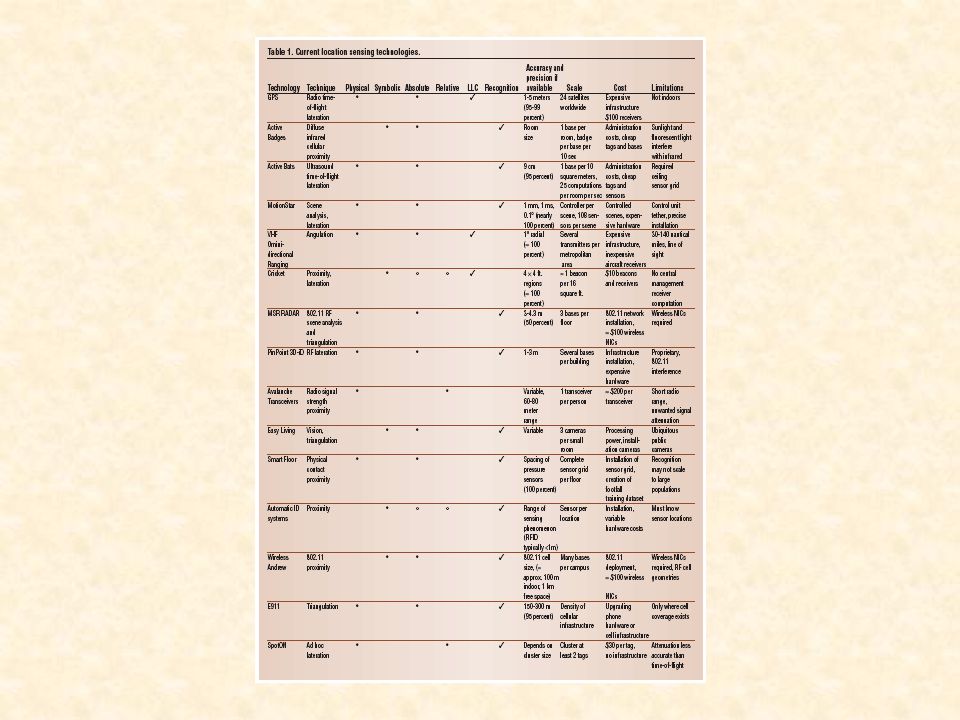
Sistemas de Localização
Motivação Avanço da Tecnologia Componentes mais baratos Avanço das tecnologias sem fio Surgimento de aplicações que demandam saber sobre a localização de pessoas e objetos (principalmente computação ubíqua)
")
4
Sistemas de Localização
Tecnicas Triangulação GPS Proximidade Infravermelho , Ultrasom Analise de cena/ambiente Cameras digitais

5
Sistemas de Localização
Descrição da Localização Coordenadas Simbólica Ex: dentro de um quarto Física Ex : 74º15’ N e 65º23’W

6
Sistemas de Localização
Descrição da Localização Referência Relativa :Cada objeto têm seu próprio framework/referência Ex: A 10 metros do prédio Cardeal Leme Absoluta : Objetos compartilham uma mesma referência Ex: Sala 246 , 2º andar

7
Sistemas de Localização
Computação da Localização No objeto a ser Localizado Infraestrutura não sabe onde o objeto está, depende dele divulgar a sua posição Privacidade garantida Pela infraestrutura Infraestrutura sabe onde o objeto se localiza Privacidade depende de controle de acesso Necessária quando o objeto não tem poder computacional

8
Sistemas de Localização
Precisão e Certeza Sensor Fusion Junção de várias tecnologias Adaptative Fidelity Variação da precisão de acordo com falhas ou recursos de energia por exemplo Redes de sensores Ad Hoc

9
Sistemas de Localização
Escalabilidade Área de cobertura por unidade de infraestrutura Numero de objetos que podem ser localizados por item de infraestrutura por intervalo de tempo

10
Sistemas de Localização
Identificação de objetos Mais usual – GUID – Global Unique Ids Alguns sistemas não têm essa capacidade Ex : GPS

11
Sistemas de Localização
Custo Tempo Instalação Administração Espaço Tamanho da infraestrutura Tamanho do Hardware Capital

12
Sistemas de Localização
Limitações Não funcionam em todos os lugares Não funcionam em todas as condições do ambiente/climáticas Dependem da Tecnologia

14
Location Stack Abstrações de design Vocabulário comum
Framework Comparativo Implementação emprega técnicas probabilísticas que possibilitam a fusão de dados de vários sensores , provendo uma interface comum as aplicações

15
Location Stack Motivação Computação Ubíqua
Ex: A casa responder a atividades de seus moradores Ex: Interação com dispositivos a nossa volta Ex: Log de procedimentos experimentais

16
Location Stack Motivações Sistemas normalmente fechados
Sistema normalmente construído em um único bloco Previne contra erros de precisão e de tempo Maior difusão de software reusável Sensor Fusion Hardware mais barato

17
Location Stack Modelo em camadas Modelo deriva das seguintes questões:
Há tipos de medidas fundamentais Distancia Ângulo Proximidade Todos apresentam incertezas e precisão

18
Location Stack Modelo em camadas Modelo deriva das seguintes questões:
Há modos padrões de combinar medidas Ex: distância e proximidade, localização e ângulo Há modos padrões de relacionar objetos Proximidade Contido em uma região Formação geométrica

19
Location Stack Modelo em camadas Modelo deriva das seguintes questões:
Incerteza tem que ser preservada A aplicação deve ser responsável por decidir o que fazer Aplicações normalmente estão relacionadas a atividades Informações de localização Informações de contexto Machine Learning

20
Location Stack

21
Location Stack Sensores – Sensors Hardware e drivers
Detecção de fenômenos físicos Exporta dados em uma variedade de formatos

22
Location Stack Medições – Measurements
Transcreve os dados recebidos pela camada de sensores em medidas : angulos, distancia, proximidade Cada medida apresenta uma incerteza Exporta um stream de medidas e suas incertezas

23
Location Stack Fusão – Fusion
Funde continuamente as medidas recebidas da camada abaixo, utilizando uma representação probabilistica da localização dos objetos Normalmente é responsável por tratar a resolução da identidade dos objetos Não há uma representação particular de coordenadas adotada Exporta uma interface para eventos e/ou queries sobre a localização dos objetos e sua incerteza.

24
Location Stack Relações Espaciais – Arrangements
Prove operadores para relacionar dois ou mais objetos Exporta uma interface para queries e/ou enventos para inferir o relacionamento entre dois ou mais objetos

25
Location Stack Fusão Contextual – Contextual Fusion
Combina informação sobre localização ou relacionamento espacial com outras informações contextuais não ligadas a localização: Temperatura Lista de tarefas Exporta uma interface para que a plicação reconheça atividades.

26
Location Stack Atividades – Activities
Categoriza informações de contexto em estados semânticos definindo a interpretação da aplicação sobre o mundo Machine Learning

27
Location Stack Intenções – Intentions Desejo dos usuários do sistema
O que pretende os usuários quando utilizam o sistema?

28
Location Stack Implementação de referência Sensores utilizados:
Infravermelho (Versustech) Crickets de ultra som e badges (MIT) Lasers (Sick)
 Crickets de ultra som e badges (MIT) Lasers (Sick)")
29
Location Stack Implementação de referência Medidas:
Infravermelho e Ultrasom mediam localização, mas de forma esparsa, e identificam objetos Laser mede localização com uma maior precisão, mas não infere identidade

30
Location Stack Implementação de referência Fusão
Maior contribuição da implementação de referência Representação probabilística da localização permite a fusão de diferentes tecnologias de sensores Inspiração veio da robótica que usa tal abordagem, com robôs que utilizam vários sensores diferentes.

31
Location Stack Implementação de referência Fusão
Utilizaram Bayesian Filters Particle Filters Multi-hypotetic tracking Voronoi Tracking Provê testes para proximidade de objetos e containment

32
Location Stack Implementação de Referência Java Sistema distribuído
Mensagens assíncronas utilizando XML Chamadas de processo remotas Estendem classes do projeto Intel RAIN

33
Location Stack Implementação de Referência
Um único serviço de fusão sendo executado em um PC de 1.8 GHz e 512MB de memoria: Fez tracking de multiplos objetos (mais de 40) Taxa de duas medidas por segundo por objeto Maior performance pode ser alcançada utilizando múltiplos serviços de fusão
 Taxa de duas medidas por segundo por objeto. Maior performance pode ser alcançada utilizando múltiplos serviços de fusão.")
34
Location Stack Implementação de Referência

35
Location Stack Exemplo de separação em camadas
Microsoft’s Easy Leaving

36
Location Stack Easy Living Sensores Cameras Sensores de pressão
Leitor de impressão digital Teclado para login

37
Location Stack Easy Leaving Medidas
Cameras provem localização espacial de vultos com forma humana Sensores de pressão indicam seu estado binariamente, se á algo em cima deles Teclado e leitor de impressão digital são usados para a identificação da pessoa

38
Location Stack Easy Leaving Fusão
Percebe onde há pessoas no ambiente, guarda apenas um histórico recente da posição das pessoas Infere a identidade da pessoa pelo login e pelos sensores de pressão Indica a localização da pessoa em um plano 2-D

39
Location Stack Easy Leaving Arrangements Utiliza um banco de dados SQL
Entidades são descritas por posições relativas Faz apenas um tracking instantâneo, que é atualizado pelas informações vindas da camada abaixo

40
Location Stack Easy Leaving Fusão contextual
Outras informações poderiam ser associadas ao ID da pessoa ou entidade

41
Location Stack Easy Living Atividades
Behavior Engine – verifica o banco de dados que representa o mundo (Camada de Arrengemens e Fusão Contextual) e envia comandos aos dispositivos presentes nos ambientes.
 e envia comandos aos dispositivos presentes nos ambientes.")
42
Location Stack Perguntas???? Muito Obrigado!!!