Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Automation Petri Net (APN)
Disciplina: ECA 20 – Automática II Professor: Luiz Edival de Souza UNIFEI – Universidade Federal de Itajubá

2
Introdução Extensão da Rede de Petri para representar condições de sensores e atuadores para aplicação em automação Dificuldades encontradas para implementação direta em Ladder ou outra linguagem utilizada em automação Ladder: Dificuldade de implementação; Tempo gasto na execução; Modelagem de entradas e saídas; Problemas futuros para identificação do programa ( Ex. Falta de comentários)
")
3
Introdução Sistemas de automação se tornam mais complexos a cada dia, há necessidade de uma ferramenta eficaz para modelar as diversas características de sistemas dinâmicos a eventos discretos (SDEDs). A rede de Petri surgiu com uma ferramenta alternativa para facilitar o desenvolvimento de SDEDs. Existem diversas propostas de métodos que convertam diretamente redes de Petri na lógica Ladder. Entretanto, nenhum destes métodos produziram uma técnica que fosse geral. Dificuldades em tratar lógicas com temporizadores, contadores, movimentação de dados.
. A rede de Petri surgiu com uma ferramenta alternativa para facilitar o desenvolvimento de SDEDs. Existem diversas propostas de métodos que convertam diretamente redes de Petri na lógica Ladder. Entretanto, nenhum destes métodos produziram uma técnica que fosse geral. Dificuldades em tratar lógicas com temporizadores, contadores, movimentação de dados.")
4
Objetivo Apresentar uma metodologia para a elaboração de projetos e execução de sistemas de eventos discretos na área industrial. Considerar uma extensão da RdP básica chamada de APN (Automation Petri Net). Oferecendo de forma prática e rápida um auxílio para elaboração da Lógica Ladder utilizada em Controladores Lógicos Programáveis. Este conceito denominamos de lógica de passagem de fichas (TPL – Token Passing Logic).
. Oferecendo de forma prática e rápida um auxílio para elaboração da Lógica Ladder utilizada em Controladores Lógicos Programáveis. Este conceito denominamos de lógica de passagem de fichas (TPL – Token Passing Logic).")
5
Revisando! Conceitos Básicos da Rede de Petri
Grafo orientado, bipartido composto por dois nós chamados lugares e transição e interligados por arcos. 5-uplas - Definida da seguinte maneira: (P,T, I,O, Mo) Sendo: P – Lugar T – Transição I – função de entrada na transição O – função de saida da transição Mo – Marcação inicial
 Sendo: P – Lugar. T – Transição. I – função de entrada na transição. O – função de saida da transição. Mo – Marcação inicial.")
6
Revisando! Conceitos Básicos de APN (Automation Rede Petri):
Rede diferenciada que consegue envolver sensores e atuadores dentro de uma estrutura extendida da Rede de Petri. Uma rede APN pode ser definida da seguinte maneira: APN = (P,T,Pre, Post, In, En, x, Q, Mo)
")
7
Revisando! Conceitos Básicos de APN (Automation Petri Net):
P – {p1,p2,...pm) é um conjunto finito, não vazio, de lugares T – {t1, t2,...tn} é um conjunto finito, não vazio, de transições P U T≠ Ǿ and P ∩ T= Ǿ Pre – (P x T) N é uma função de entrada que define arcos ordinários de lugares para transição, onde N é inteiros não negativo. Post – (T x P) N é uma função de saída que define arcos ordinários de transição para lugares In – (P x T) N é uma função de entrada que define arcos inibidores do lugar para transição En - ( P x T) N é função de entrada que define arcos habilitadores de lugar para transição X – {x1,x2,....,xn} é um conjunto finito, não vazio de condições booleanas de disparos associadas as transições Q – (q1, q2,....,qm) é conjunto finito de ações que pode ser atribuída para lugares
 é um conjunto finito, não vazio, de lugares. T – {t1, t2,...tn} é um conjunto finito, não vazio, de transições. P U T≠ Ǿ and P ∩ T= Ǿ. Pre – (P x T) N é uma função de entrada que define arcos ordinários de lugares para transição, onde N é inteiros não negativo. Post – (T x P) N é uma função de saída que define arcos ordinários de transição para lugares. In – (P x T) N é uma função de entrada que define arcos inibidores do lugar para transição. En - ( P x T) N é função de entrada que define arcos habilitadores de lugar para transição. X – {x1,x2,....,xn} é um conjunto finito, não vazio de condições booleanas de disparos associadas as transições. Q – (q1, q2,....,qm) é conjunto finito de ações que pode ser atribuída para lugares.")
8
Regras da APN REGRA NUMERO 1: ARCO ORDINÁRIO
1- A transição t1 é dita habilitada quando o lugar p1 contiver pelo menos um número de fichas maior ou igual ao peso do arco que conecta p1 a t1. 2- A transição habiltada pode ser disparada se a condição booleana associada a expressão booleana X1 for verdadeira 3 - Vale a mesma regra de evolução da RdP convencional. O disparo de t1 adiciona 3 fichas em p2 e uma ficha em p3

9
Regras da APN 1 - O arco conecta um lugar p1 a uma transição t1.
REGRA NÚMERO 2: ARCO HABILITADOR 1 - O arco conecta um lugar p1 a uma transição t1. 2 - A transição t1 está HABILITADA quando o número de fichas for maior ou igual ao peso do arco 3- O disparo de t1 NÃO REMOVE as fichas de p1 mas adiciona fichas em p2 de acordo com o peso do arco. OBS: O arco (t1,p2) é um arco ordinário. O arco habilitador conecta somente lugares a transição
 é um arco ordinário. O arco habilitador conecta somente lugares a transição.")
10
Regras da APN REGRA NÚMERO 3: ARCO HABILITADOR COM EVENTO DE SUBIDA
1 - O lugar p1 é conectado a transição t1 com um arco habilitador com evento de subida (leading-edge - LE) 2 - A transição é habilitada somente no instante em que o número de fichas de p1 fica no mínimo igual ao peso do arco. 3 - Na figura é preciso que o número de fichas de p1 fique menor que 2 e somente no instante em que voltar a dois ou mais é que a transição fica habilitada. 4 - Se a condição booleana estiver satisfeita a transição t1 será disparada.
 2 - A transição é habilitada somente no instante em que o número de fichas de p1 fica no mínimo igual ao peso do arco. 3 - Na figura é preciso que o número de fichas de p1 fique menor que 2 e somente no instante em que voltar a dois ou mais é que a transição fica habilitada. 4 - Se a condição booleana estiver satisfeita a transição t1 será disparada.")
11
Regras da APN REGRA NUMERO 4: ARCO INIBIDOR
1 - O lugar p1 é conectado a transição t1 com um arco inibidor, 2 – A transição t1 é DESABILITADA quando o lugar p1 tiver um número MAIOR OU IGUAL ao peso do arco do inibidor.

12
Regras da APN REGRA NUMERO 5: ARCO INIBIDOR COM EVENTO DE DESCIDA
1 - O lugar p1 é conectado a uma transição t1 com um arco inibidor com evento de descida ( falling-edge FE), 2 - A transição t1 é habilitada no instante em que o número de fichas no lugar p1 passa ser menor do que o peso do arco
, 2 - A transição t1 é habilitada no instante em que o número de fichas no lugar p1 passa ser menor do que o peso do arco.")
13
Revisando todos arcos Conceitos básicos de APN

14
CONDIÇÕES ASSOCIADAS AS TRANSIÇÕES
A transição será disparada quando estiver habilitada de acordo com a regra dos arcos descritos anteriormente e se as condições booleanas a seguir forem satisfeitas CONDIÇÕES PARA DISPARAR UMA TRANSIÇÃO HABILITADA 1 - uma condição booleana poderá estar associada a um evento de descida ( falling-edge FE) proveniente de um sensor 2 - uma condição booleana poderá estar associada a um evento de evento de subida (leading-edge LE) proveniente de um sensor 3 - uma condição booleana poderá estar associada a um nível positivo (estado lógico 1) proveniente de uma expressão booleana com operadores “AND”, “OR” e “NOT” OBS: Arcos habilitadores e inibidores não removem fichas dos lugares
 proveniente de um sensor. 2 - uma condição booleana poderá estar associada a um evento de evento de subida (leading-edge LE) proveniente de um sensor. 3 - uma condição booleana poderá estar associada a um nível positivo (estado lógico 1) proveniente de uma expressão booleana com operadores AND , OR e NOT OBS: Arcos habilitadores e inibidores não removem fichas dos lugares.")
15
Metodologia TPL – Token Passing Logic
A metodologia permite gerar a Lógica Ladder a partir da Rede de Petri. A metodologia permite utilizar as redes de Petri P – temporizadas (lugar temporizado), as redes de Petri T - Temporizadas (transição temporizada) e as redes de Petri coloridas A utilização da TPL permite gerar em qualquer linguagem definida na norma IEC
, as redes de Petri T - Temporizadas (transição temporizada) e as redes de Petri coloridas. A utilização da TPL permite gerar em qualquer linguagem definida na norma IEC")
16
Metodologia O IEC descreve os seguintes linguagens de programação Linguagem gráfica 1. Sequencial function chart (SFC). 2. Ladder Diagram (LD). 3. Function block diagram (FBD). Linguagem Textual 1. Instruction list (IL). 2. Structured text (ST).
. 3. Function block diagram (FBD). Linguagem Textual. 1. Instruction list (IL). 2. Structured text (ST).")
17
Metodologia A característica principal da metodologia é que facilita a conversão direta de uma APN em uma lógica de controle, que possa ser executada com linguagens de baixo nível tais como o ST, IL ou LD, ou com linguagens de nível elevado tais como C ou C++. Em geral,o número de fichas do lugar de uma APN corresponde ao conteúdo de um registro (palavra de memória de 16 bits) associada a cada lugar da TPL. Se o lugar for binário utiliza memória de um único bit
 associada a cada lugar da TPL. Se o lugar for binário utiliza memória de um único bit.")
18
Transformação de APN para TPL

19
Rede de Petri Automação
EXEMPLO Equivalente denominado TPL Rede de Petri Automação

20
Ladder

21
Exercício 1 Liga Desliga SYS_OFF SYS_ON
Ao energizar um sistema de automação uma lâmpada de sinalização SYS_OFF deverá acender e uma lâmpada de sinalização SYS_ON deverá apagar. Ao pressionar uma botoeira, SYS_ON deverá acender e SYS_OFF deverá apagar. Ao pressionar uma botoeira Desliga, SYS_OFF deverá acender e SYS_ON apagar Liga Desliga SYS_OFF SYS_ON

22
Exercício 2 Considere que exercício anterior seja o comando para habilitar o sistema abaixo SP = Sensor de peca SPG = Sensor de peca grande CT = Correia de Transporte (esteira)
")
23
Exercício 2 Se SYS_ON = 1 e SP = 1 então Ligar Motor
Se SPG =1 então acionar pistão Se esteira vazia então motor poderá ser desligado

25
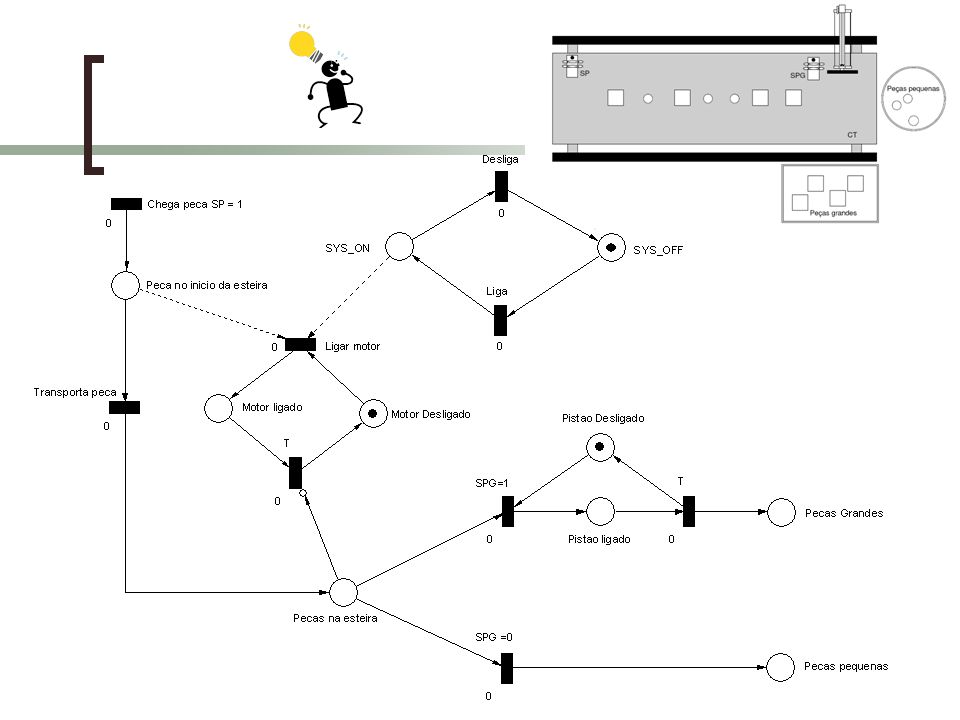
Exercício 3 SP = Sensor de peca SPG = Sensor de peca grande
Incluir no exercício anterior um desligamento automático da esteira após “t” segundos de ausência de peças na esteira. Se após o desligamento do motor aparecer peça no início da esteira o motor deverá ser ligado. SP = Sensor de peca SPG = Sensor de peca grande CT = Correia de Transporte (esteira)
")
26
Exercício 4 SP = Sensor de peca SPG = Sensor de peca grande
Incluir no exercício anterior um desligamento através da botoeira Desliga que desligará definitivamente o sistema mesmo que apareça uma peça no início da esteira. Os estados das lâmpadas deverão ser: SYS_ON = 0 E SYS_OFF = 1 SP = Sensor de peca SPG = Sensor de peca grande CT = Correia de Transporte (esteira)
")
27
Proposta de Exercício Desenvolver um modelo em Rede de Petri para modelar a lógica de funcionamento de um tanque de tratamento de efluente.

28
Trabalho Prático 1 Tanque para Tratamento de Efluente Industrial

29
Trabalho Prático 1 Constitui-se de um tanque de neutralização que contém pás para a mistura, tanques com soluções ácida (H2SO4) e básica (CaCO3), as quais visarão o tratamento da água industrial conforme indicação do sensor de PH. O processo do tratamento da água inicia-se com - abertura da válvula V1 que enche o tanque até a detecção do sensor de nível SN2 dando início a partida do motor M,iniciando o giro das pás. - Quando da detecção do sensor de nível SN1 realiza-se então o fechamento da válvula V1, temporizando a mistura por mais 10s. - Com o conhecimento do valor de pH do efluente através de um sensor de pH, inicia-se então as condições de tratamento com a abertura da válvula V2 (tratamento com base) ou válvula V3 (tratamento com ácido) ou então pela não necessidade de tratamento (pH neutro).
 e básica (CaCO3), as quais visarão o tratamento da água industrial conforme indicação do sensor de PH. O processo do tratamento da água inicia-se com. - abertura da válvula V1 que enche o tanque até a detecção do sensor de nível SN2 dando início a partida do motor M,iniciando o giro das pás. - Quando da detecção do sensor de nível SN1 realiza-se então o fechamento da válvula V1, temporizando a mistura por mais 10s. - Com o conhecimento do valor de pH do efluente através de um sensor de pH, inicia-se então as condições de tratamento com a abertura da válvula V2 (tratamento com base) ou válvula V3 (tratamento com ácido) ou então pela não necessidade de tratamento (pH neutro).")
30
Trabalho Prático 1 Considere as condições de Ph
básico < 450, 450 < neutro < 550 e ácido >550. Decorrido a neutralização do pH anteriormente o processo é temporizado em 30 segundos visando misturar as soluções caso necessários. Após então ocorre a abertura da válvula V4 para descarga com o funcionamento da bomba B de escoamento do efluente tratado até o completo esvaziamento do tanque. A finalização do processo dá-se então com o desligamento da bomba 10 segundos após a interrupção das pás do misturador.

31
Trabalho Prático 1

32
Trabalho Prático 2 Implementar o modelo RdP do artigo disponibilizado.

Apresentações semelhantes