Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Processamento de Imagens
Segmentação (Parte 1)
")
2
Segmentação Segmentação Análise de Imagem
“Divisão da imagem em partes com grande correlação aos objetos e áreas do mundo real contidos na imagem” Completa: obter objetos disjuntos Parcial: objetos obtidos podem não ser objetos distintos

3
Segmentação Completa Pode requerer cooperação de níveis mais altos de processamento que usam conhecimento específico do problema As vezes, apenas processamento em nível mais baixo é a solução. Independente de contexto Não existe modelo para o objeto Não existe conhecimento da segmentação esperada Objetos contrastados em fundo mais escuro identificação de células, caracteres, etc.

4
Segmentação Parcial Divisão da imagem em regiões homogêneas segundo uma propriedade brilho, cor, textura Segmentação de uma imagem aérea Mais viável muito difícil obter segmentação completa de uma cena sempre

5
Classificação dos Métodos de Segmentação
Conhecimento global (histogram-based) Baseada em bordas (Edge-based Segmentation) Descontinuidade entre regiões Baseada em Regiões (Region-based) Similaridade entre regiões
 Baseada em bordas (Edge-based Segmentation) Descontinuidade entre regiões. Baseada em Regiões (Region-based) Similaridade entre regiões.")
6
Métodos “Recentes” Algoritmos Genéticos Redes Neurais
Métodos Estocásticos (MRF) Morfologia Matemática Segmentação por Textura Segmentação por Cor
 Morfologia Matemática. Segmentação por Textura. Segmentação por Cor.")
7
Limiarização (Thresholding)
Limiarização em nível de cinza: método mais simples de segmentação. Usa a intensidade do pixel como separador. Limiarização:

8
Exemplos de Thresholding

9
Thresholding Objetos que não se tocam
nível distinto do fundo (background) Determinação do limiar correto (Threshold) é crucial interativamente automaticamente global (menos provável): único limiar p/ imagem T = T(f) variável: variação do limiar “ao longo” da imagem T = T(f, Fc ), Fc é uma sub imagem de F
 Determinação do limiar correto (Threshold) é crucial. interativamente. automaticamente. global (menos provável): único limiar p/ imagem. T = T(f) variável: variação do limiar ao longo da imagem. T = T(f, Fc ), Fc é uma sub imagem de F.")
10
Tipos de Limiarização Por banda: Multi-bandas:

12
Detecção do Limiar (T) Tem-se informação “a priori”? Simples
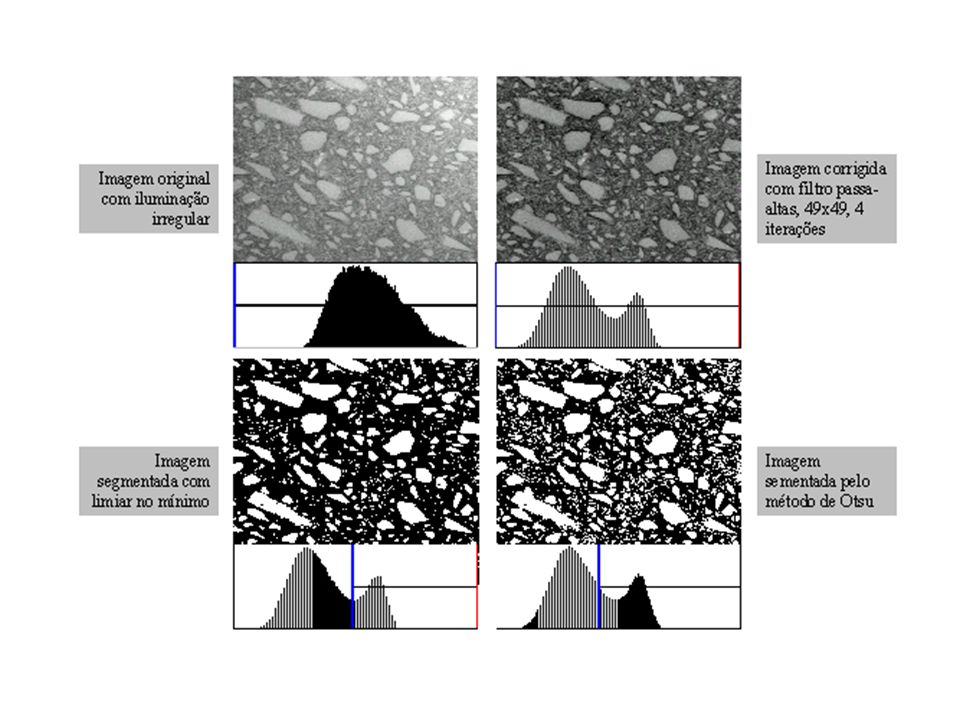
exemplo: detecção de caracteres em um folha papel Análise do formato do histograma bi-modal: Objetos de mesmo NC + fundo Fundo: + claro Objetos: + escuros

13
Métodos Automáticos Utilizar os mínimos do histograma Exemplo:
tonalidades intermediárias entre duas bandas Problemas valores muito largos e planos valores assumem valores muito baixos: sensibilidade a ruído. Exemplo: p/ histogramas bi-modais, ache os dois pontos de máximo primeiramente e, depois, o mínimo entre eles. (Mode method)
")
14
Limiar Ótimo Limiar escolhido como o nível de cinza mais próximo correspondente a probabilidade mínima entre dois pontos de máximo de duas ou mais distribuições normais. Método de Otsu: determina o tom de corte que maximiza a medida de variância entre o objeto e o fundo

16
Algoritmo Isodata: Livro Sonka

17
Método de Otsu Seleção do ponto mais baixo entre duas classes
Frequência e média Análise da variância total (imagem inteira)
")
18
Método de Otsu Variância entre classes Substituindo temos
0,1 e 0,1 são as freqüências e médias das duas classes

19
Método de Otsu A função que envolve a variância entre classes e a variância total é dada por: Avaliar todos os possíveis limiares. Aquele que maximizar será o limiar ótimo.

21
Limiarização Multi-Espectral
G B

22
Segmentação por Bordas
Depende de arestas das imagens localizados pelos operadores de bordas. arestas: descontinuidades no nível de cinza, cor textura,etc. Muito susceptíveis ao ruído (presença de arestas onde não há bordas ou vice-versa)
")
23
Segmentação por Bordas
Não basta apenas identificar as bordas e construir um contorno a partir delas. É preciso identificar o objeto a partir desses contornos Objeto: região dentro de um contorno

24
Seg. Bordas: Limiarização
Operação de detecção de bordas Aplicar Thresholding sobre a imagem de arestas (edge image) Valor de mínimo ou média do histograma Ligar os segmentos de bordas em um contorno (edge linking) Os pontos que passaram no thresholding são ligados aos seus vizinhos, segundo uma distância máxima
 Valor de mínimo ou média do histograma. Ligar os segmentos de bordas em um contorno (edge linking) Os pontos que passaram no thresholding são ligados aos seus vizinhos, segundo uma distância máxima.")
25
Seg. Bordas: Limiarização

26
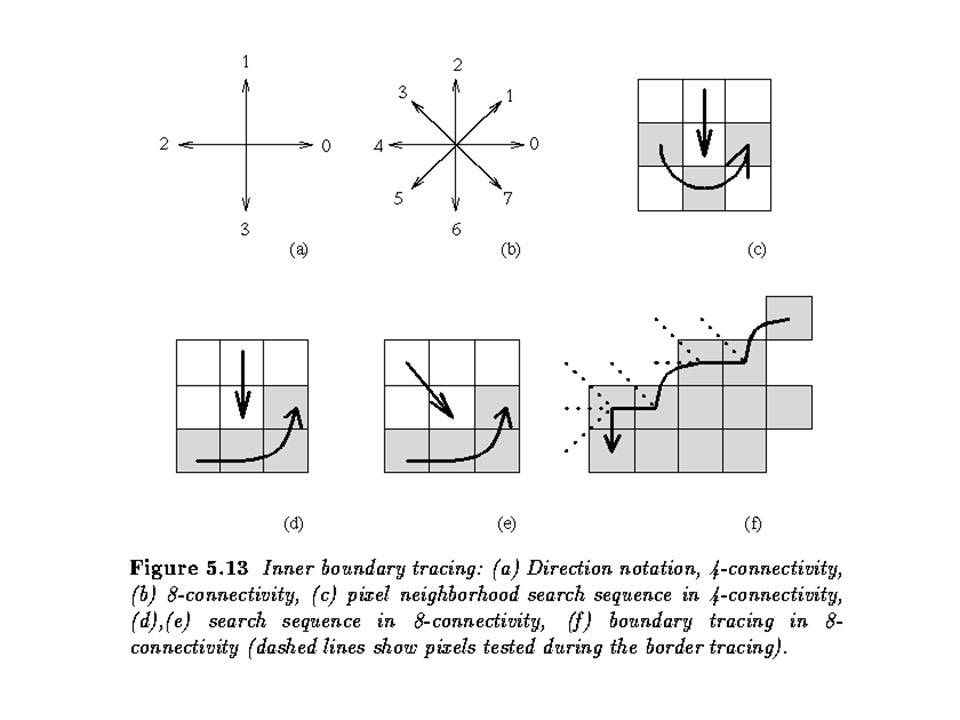
Supressão de arestas Uma imagem de arestas (edge image) apresenta borda ‘espessa’, mas a borda deve ser composta por um pixel simples. Discretizar as direções de acordo com 8-conectado Para cada pixel com magnitude não-zero, inspecione os dois pixels adjacentes (segundo a direção da aresta) Se a magnitude de um deles for maior que a do pixel corrente, marque-o para remoção. Percorra novamente a imagem e zere os pixels marcados para remoção.
![]()
27
Seg. por Rastreamento de Bordas
Border Tracing (ou tracking) Depende do grau de conectividade utilizado 4-conectado 8-conectado A borda vai sendo composta aplicando-se a cada pixel um operador que define a direção do gradiente (que indica a posição do próximo pixel da borda) Objetivo: encontrar uma “inner region border”
 Depende do grau de conectividade utilizado. 4-conectado 8-conectado. A borda vai sendo composta aplicando-se a cada pixel um operador que define a direção do gradiente (que indica a posição do próximo pixel da borda) Objetivo: encontrar uma inner region border")
30
Achando a borda externa (pertencente ao fundo)
")
31
Borda externa (outer region border)
")
32
Seg. Bordas: Grafos de arestas
Quando existe conhecimento a priori da direção da borda Usar esse conhecimento (magnitude ou direção das arestas) como pesos num processo de busca de caminho mínimo em uma estrutura de grafo.
 como pesos num processo de busca de caminho mínimo em uma estrutura de grafo.")
33
Busca em grafos de arestas
Conhecendo a magnitude e direção em uma imagem edge, cada pixel corresponde a um nó no grafo, cujo peso é a magnitude.

34
Angiografia coronariana
Imagem de arestas borda encontrada por grafo

35
Seg. Bordas: Transformada Hough
Objetos têm tamanho e forma conhecidos localizar áreas em circuitos impressos Podemos usar máscaras de convolução Problemas: zoom, rotação, distorções, etc. Transformada de Hough: projetada inicialmente para identificar linhas. Pode ser generalizada para localização de círculos e outras curvas.

36
Transformada de Hough para um Círculo

37
Seg. Bordas: Marr-Hildreth
1970: importância dos contornos na interpretação de imagens Operadores existentes até então: Sobel, Prewit -> dependência do tamanho e ruído Step-edge: mudança abrupta na função de uma imagem

38
Marr-Hildreth Primeira derivada: extremo na posição da aresta
Segunda derivada: zero na mesma posição

39
1a Derivada Aprox. numérica Máscaras 1D Máscaras 2D

40
2a Derivada Laplaciano Aprox. em 1D Equivalente a: Aprox. 2D

41
Marr-Hildreth Como computar a segunda derivada robustamente?
1) Suavizar a imagem (redução de ruído). Operador Gaussiano 2D 2) Detecção de bordas com Laplaciano
 Suavizar a imagem (redução de ruído). Operador Gaussiano 2D. 2) Detecção de bordas com Laplaciano.")
42
Marr-Hildreth A segunda derivada de f(x,y) suavizada Operador Laplace
isotrópico (não é direcional) LOG (Laplace of Gaussian) Aproximações discretas do Operador Laplaciano
 LOG (Laplace of Gaussian) Aproximações discretas do Operador Laplaciano.")
43
Marr-Hildreth

Apresentações semelhantes














 Continuação.>")







