Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Programa de Educação Tutorial Universidade Federal do Espírito Santo Departamento de Informática 1º Time de Futebol de Robôs Capixaba

2
Agenda Breve histórico do projeto Sistema atual Metas do projeto

3
Breve histórico 2005: o projeto surgiu da ideia de um bolsista do grupo PET-EngComp após descobrir a existência de tal modalidade; 2006: o grupo fez um estudo de viabilidade do projeto para decidir se havia condições de desenvolver e custear o mesmo; 2006: mesmo sabendo que não haveria condições de custeio do projeto o grupo decidiu começar a estudar o assunto e desenvolver o que fosse possível; 2006: a Profª. Drª. Raquel Frizera Vassallo do departamento de Engenharia Elétrica oficializou a orientação do projeto; 2007: foi desenvolvida a primeira versão do sistema de visão e foram desenvolvidos os primeiros testes de controle sobre um robô diferencial, porém fora das especificações da categoria IEEE Very Small Soccer; 2007: o Profº. Humberto Ferasoli da UNESP-Bauru fez a doação de estruturas mecânicas do robô feitas em resina; 2008: o sistema de visão foi aprimorado, foi desenvolvido uma camada de estratégia e o grupo participou do primeiro campeonato na CBR; 2009: foi desenvolvida uma nova camada de estratégia e está sendo desenvolvido o projeto mecânico do robô;

4
Sistema Atual

5
Camada de visão: Câmera: Taxa de frame máxima 60 fps Resolução máxima da imagem à 60 fps: 640x480 Interface com PC: firewire IEEE 1934a Características principais: Segmentação de cor: objetiva identificar na imagem todos os objetos de interesse. No caso do futebol, tanto os robôs do nosso time quanto os do time adversário. Rastreamento de objetos (tracking): uma vez identificados os objetos de interesse é necessário localizá-los a cada novo quadro (frame).
: uma vez identificados os objetos de interesse é necessário localizá-los a cada novo quadro (frame)..")
6
Sistema Atual Camada de Estratégia: Uso de zonas no campo para determinar o comportamento do time; Para decidir o comportamento do time é utilizada uma função que leva em conta, além das zonas do campo, a probabilidade que o time tem de alcançar os objetivos; Como o novo projeto do robô ainda não está pronto a estratégia foi toda desenvolvida utilizando um simulador de futebol de robôs;

7
Sistema Atual Camada de Controle (PC): Controlador básico: controlador estabilizante de posição; Controlador desenvolvido: controlador estabilizante de posição e orientação; Configuração do módulo de RF (Xbee): o transmissor trabalha enviando o pacote de informação em modo broadcast; Camada de Controle (Embarcado): Motores acionados via PWM;O receptor recebe o pacote sem verificar a origem e cada robô lê a sua parte da mensagem;
: Controlador básico: controlador estabilizante de posição; Controlador desenvolvido: controlador estabilizante de posição e orientação; Configuração do módulo de RF (Xbee): o transmissor trabalha enviando o pacote de informação em modo broadcast; Camada de Controle (Embarcado): Motores acionados via PWM;O receptor recebe o pacote sem verificar a origem e cada robô lê a sua parte da mensagem;")
8
Sistema Atual Hardware: Placa de circuito impresso: Circuito de controle dos motores integrado com o módulo de comunicação; Microcontrolador: MSP430F1611; Uso de acopladores ópticos; Estrutura feita de resina (polímero); Motores: sem caixa de redução
; Motores: sem caixa de redução")
9
ESTRATÉGIA

10
Chaveamento da Posição Função que defini o comportamento do time de acordo com a situação do jogo. Leva em consideração: Posição da Bola; Velocidade da Bola; Velocidade dos Robôs; Orientação da Bola;

11
Chaveamento da Posição Primeiro é levado em consideração a posição atual da bola, se ela estiver na área de defesa, então o time é posicionado em postura defensiva, caso contrário é posicionado em postura ofensiva. Outras situações: Bola indo em direção ao campo de defesa com velocidade elevada; Bola indo em direção ao gol com velocidade elevada; Consideração: velocidade elevada significa que a velocidade da bola é 80% maior qua a velocidade do robô mais rápido.

12
Chaveamento da Posição

13
Posicionamento do Goleiro O principal parâmetro para o posicionamento do goleiro é a posição da bola. Basicamente, o goleiro se posiciona na bissetriz do ângulo formado entre a bola e as duas traves. É definida uma área na qual o goleiro tem a ação de sair na bola.

14
Posicionamento do Goleiro

15
Sistema de Defesa Ideia principal: manter um jogador na sobra enquanto o outro tenta retomar a posse de bola. Durante o jogo há momentos em que o time adversário está atacando, para recuperar a posse da bola, foi necessário então criar uma estratégia de defesa. Diferenciamos o jogador mais rápido para a bola do que não é. Então o mais rápido vai tentar recuperar a posse de bola, o segundo jogador permanece recuado de maneira a conseguir pegar a bola caso ela resvale.

16
Sistema de Defesa A posição do jogador de sobra é calculada da seguinte forma: É feito um circulo centrado no goleiro. Uma reta é traçada entre os dois pontos: posição do goleiro e da bola. A interseção do círculo com a reta gera dois pontos. O ponto mais próximo da bola é escolhido. O jogador é então mandado para esse ponto.

17
Sistema de Defesa Posicionamento do segundo jogador

18
Sistema de Defesa Também dividimos o campo em áreas conforme a figura

19
Sistema de Defesa Para cada área em que a bola se encontra o segundo jogador se posiciona a uma distância específica da bola. Essa distância é dada pelo raio do círculo, ficando maior com a distancia a bola ao gol. Com essa estratégia o jogador se movimenta sempre em cima de um arco definido pelo circulo e ajuda o goleiro, já que serve de obstáculo entre a bola e o gol.

20
Sistema de Ataque Considerando o campo do simulador com dimensões 150x130 e com referenciam no centro do campo

21
Sistema de Ataque Quando a componente y da posição da bola for maior que 30, o jogador 2 do time irá se posicionar em relação ao jogador 1 (considerando o jogador 1 como o jogador que vai atrás da bola). A componente y da posição do jogador 2 será igual a componente y da posição do jogador 1 decrescido de 20 (y2 = y1 – 20). A componente x da posição do jogador 2 dependerá de qual zona o jogador 1 se encontrará.
. A componente x da posição do jogador 2 dependerá de qual zona o jogador 1 se encontrará..")
22
Sistema de Ataque Zona 1 Quando a componente x da posição do jogador 1 for tal que |x1| >= 40, o módulo da componente x da posição do jogador 2 será igual a 40. Zona 2 Quando a componente x da posição do jogador 1 for tal que 15 <= |x1| <= 40, o valor da componente x da posição do jogador 2 será igual a -x1, fazendo com que se pareça um espelho. Zona 3 Quando a componente x da posição do jogador 1 for tal que |x1| <= 15, o módulo da componente x da posição do jogador 2 será igual a 15.

23
Sistema de Ataque

24
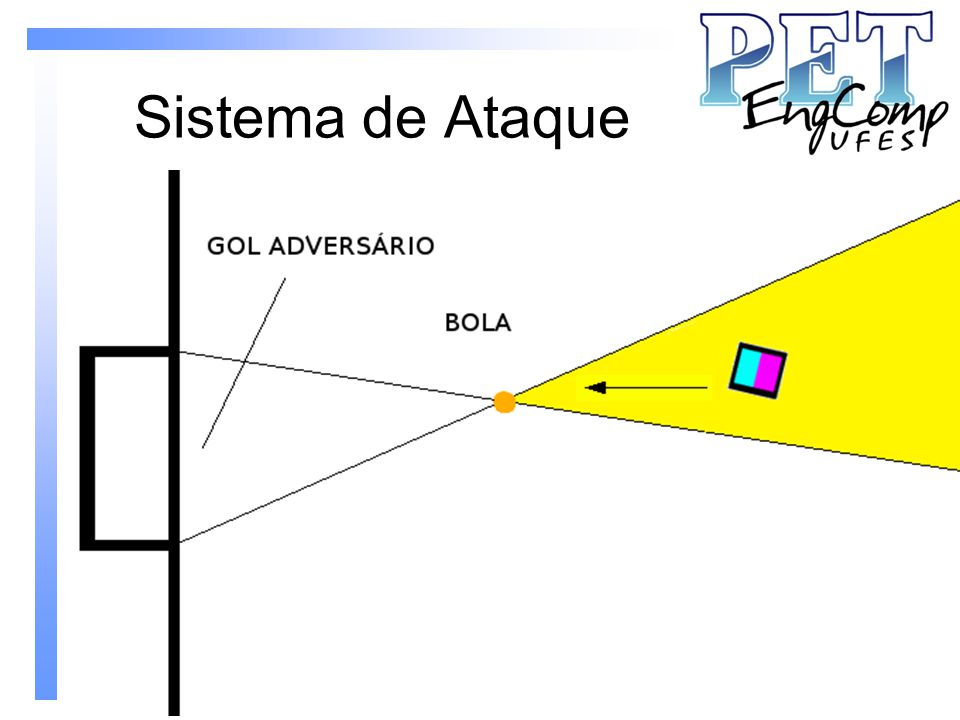
Quando está na ofensiva, o robô tenta chutar a bola para o gol, primeiramente entrando na área amarela, para então ir em direção à bola.

25
Sistema de Ataque

28
Metas do Projeto Tornar o projeto um caminho para incluir os alunos participantes do projeto, ainda graduandos, no campo da pesquisa científica e usar o sistema desenvolvido para aplicar as idéias desenvolvidas pelos alunos; Fortalecer a vertente de ensino do projeto através da inclusão de alunos de outras engenharias; Aplicar os conhecimentos adquiridos para desenvolver projetos de ensino inovadores, inicialmente para os calouros de Engenharia de Computação; Conseguir uma verba “permanente” e dedicada somente à esse projeto.

29
Bibliografia Dunked and Jenkin, Gregory and Michael, Computational principles of mobile robotics Oliveira, Dalfior and Vassalo; Clebson, Júlio and Raquel; Vision and Control Layers of UFES_Hard_Soccer Team; TDP for LARC 2008

30
Programa de Educação Tutorial Universidade Federal do Espírito Santo Departamento de Informática 1º Time de Futebol de Robôs Capixaba

Apresentações semelhantes