Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Prof. Reinaldo Bianchi Centro Universitário da FEI 2013
Robótica Prof. Reinaldo Bianchi Centro Universitário da FEI 2013

2
Parte B 5ª aula para a graduação
3a Aula Parte B 5ª aula para a graduação

3
Robotics Toolbox para o Matlab
Toolbox de livre distribuição (9ª edição): Possui modelo de alguns manipuladores prontos: PUMA560 Stanford Arm Permite criar seu próprio modelo.
: Possui modelo de alguns manipuladores prontos: PUMA560. Stanford Arm. Permite criar seu próprio modelo.")
4
Uso Copie o diretório do toolbox de : para o diretório c:\alunos
w:\eng\ele\bianchi\robotica\rvctools para o diretório c:\alunos Mude de diretorio no matlab: cd c:\alunos\rcvtools O comando abaixo deve ser executado antes de iniciar o uso do toolbox: startup_rvc

5
Criando um robô no Matlab
Ângulos em radianos Criando os links: L = Link([i di ai i], opção) onde opção (que é opcional) = ‘standard’ – parametros padrão. ‘r’ para Rotacional (default) e ‘p’ para Prismática Criando o robô: r = SerialLink([Link1 Link2 ...])
 onde opção (que é opcional) = ‘standard’ – parametros padrão. ‘r’ para Rotacional (default) e. ‘p’ para Prismática. Criando o robô: r = SerialLink([Link1 Link2 ...])")
6
Notação Danevit-Hartenberg
ai: a distância entre os eixos zi-1 e zi medida sobre o eixo xi. i: o ângulo entre os eixos zi-1 e zi medida sobre o eixo xi. di: a distância entre a origem do sistema de referência i - 1 ao eixo xi, medida sobre o eixo zi-1 . i: o ângulo entre os eixos xi-1 e xi medidos sobre o eixo zi-1.

7
Métodos associados ao link

8
Propriedades associadas ao link

9
Métodos associados ao robô

10
Propried. associadas ao robô

11
Criando um manipulador 2R
Queremos criar o seguinte manipulador 2R: 2 juntas rotacionais no eixo z links de 1 metro cada. Parâmetros D-H:

12
Comandos para criar um 2R
Criando os links: L1 = Link([ ]) L2 = Link([ ]) Criando o robô: r = SerialLink([L1 L2])
 L2 = Link([ ]) Criando o robô: r = SerialLink([L1 L2])")
13
Gerou um robô... >> L1 = Link([ 0 0 1 0]) L1 =
theta=q, d= 0, a= 1, alpha= (R,stdDH) >> L2 = Link([ ]) L2 = >> r = SerialLink([L1 L2]) r = robot (2 axis, RR, stdDH) | j | theta | d | a | alpha | | 1| q1| | | | | 2| q2| | | | grav = base = tool =
![Gerou um robô... >> L1 = Link([ ]) L1 =](http://slideplayer.com.br/slide/1469690/3/images/13/Gerou+um+rob%C3%B4...+%3E%3E+L1+%3D+Link%28%5B+%5D%29+L1+%3D.jpg "theta=q, d= 0, a= 1, alpha= 0 (R,stdDH) >> L2 = Link([ ]) L2 = >> r = SerialLink([L1 L2]) r = robot (2 axis, RR, stdDH) | j | theta | d | a | alpha | | 1| q1| 0| 1| 0| | 2| q2| 0| 1| 0| grav = 0 base = tool =")
14
Para visualizar o robô r.plot(q): r.teach(): Use as ferramentas para:
Desenha o robô r na posição q, um vetor que define os ângulos das juntas. r.teach(): Permite visualizar e modificar os valores das juntas e gravar posições. Use as ferramentas para: Ampliar, Reduzir, Girar.
: Permite visualizar e modificar os valores das juntas e gravar posições. Use as ferramentas para: Ampliar, Reduzir, Girar.")
15
r.plot([0 0])
![r.plot([0 0])](http://slideplayer.com.br/slide/1469690/3/images/15/r.plot%28%5B0+0%5D%29.jpg "r.plot([0 0])")
16
r.teach()
")
18
Usando teach e plot Voce pode usar o teach para gravar pontos, que ficam salvos na variável qplot. Depois, pode executar os movimentos de uma vez, usando: r.plot(r.qteach) r.plot(r.qteach,'delay',1)
 r.plot(r.qteach, delay ,1)")
19
Outros métodos… R.display() displays the robot parameters in human-readable form. R.dyn() displays the inertial properties of the robot: mass, centre of mass, inertia, gear ratio, motor inertia and motor friction. Entre outras…

20
Robô Puma 560 O toolkit possui uma função que cria um robo tipo Puma 560: Criando um robô PUMA: mdl_puma560 Exibindo o robô : p560.plot([ ]) Note que o nome do robô criado é p560
 Note que o nome do robô criado é p560.")
21
p560.plot([ ])
![p560.plot([ ])](http://slideplayer.com.br/slide/1469690/3/images/21/p560.plot%28%5B+%5D%29.jpg "p560.plot([ ])")
22
Computando a cinemática direta
O método fkine é usada para computar a cinemática direta: robot.fkine(q) onde: robot = variável do robô. q = vetor da posição das juntas. RETORNA: a matriz de transformação... Teste: r.fkine([0 0])
 onde: robot = variável do robô. q = vetor da posição das juntas. RETORNA: a matriz de transformação... Teste: r.fkine([0 0])")
23
r.fkine([0 0]) ans =
![r.fkine([0 0]) ans =](http://slideplayer.com.br/slide/1469690/3/images/23/r.fkine%28%5B0+0%5D%29+ans+%3D.jpg)
24
r.plot([0 0])
![r.plot([0 0])](http://slideplayer.com.br/slide/1469690/3/images/24/r.plot%28%5B0+0%5D%29.jpg "r.plot([0 0])")
25
r.fkine([0 pi/2]) ans =
![r.fkine([0 pi/2]) ans =](http://slideplayer.com.br/slide/1469690/3/images/25/r.fkine%28%5B0+pi%2F2%5D%29+ans+%3D.jpg)
26
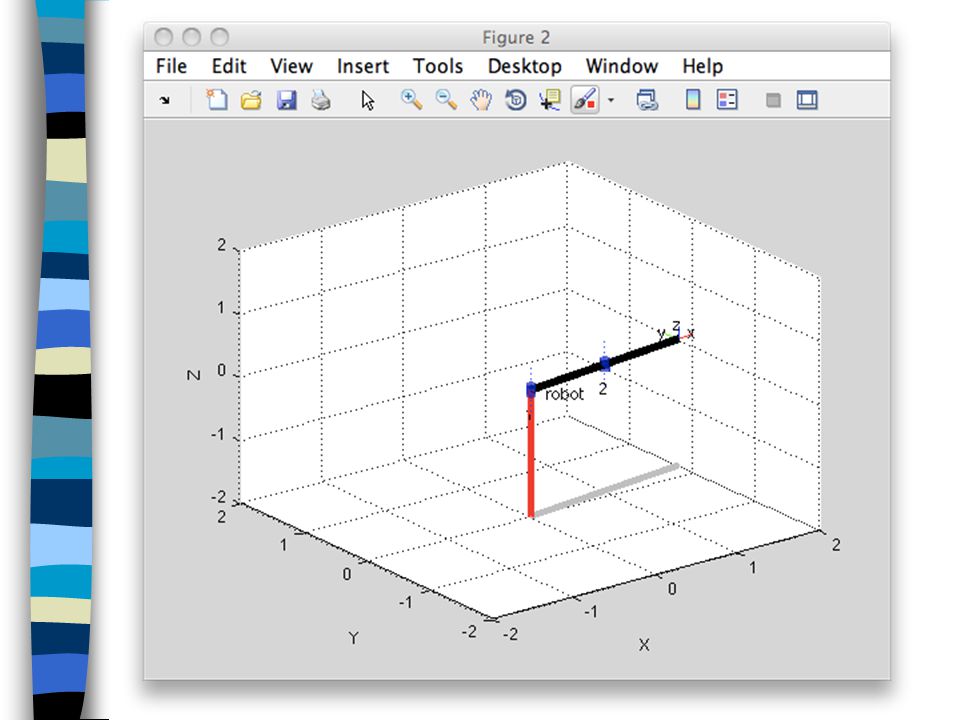
r.plot([0 pi/2])
![r.plot([0 pi/2])](http://slideplayer.com.br/slide/1469690/3/images/26/r.plot%28%5B0+pi%2F2%5D%29.jpg "r.plot([0 pi/2])")
27
Ou seja, fkine retorna... A Matriz de Transformação Homogênea 3D
3x3 rotationmatrix 3x1 translation matrix perspective global scale

28
Outros exemplos no matlab…

29
Exercício 1: Utilize a função teach para gravar os seguintes pontos:
(0 0), (/8 0), (/4 0), (3/8 0), (/2 0), (/2 /8), (/2 /4), (/2 3/8), (/2 /2), (/2 5/8), (/2 3/4), (/2 7/8), (/2 ) E use a função plot para simular o movimento do manipulador: r.plot(r.qteach,'delay',1)
, (/8 0), (/4 0), (3/8 0), (/2 0), (/2 /8), (/2 /4), (/2 3/8), (/2 /2), (/2 5/8), (/2 3/4), (/2 7/8), (/2 ) E use a função plot para simular o movimento do manipulador: r.plot(r.qteach, delay ,1)")
30
Exercício 2: Calcular a posição do manipulador 2R usando fkine para os pontos: (0 0), (/8 0), (/4 0), (3/8 0), (/2 0), (/2 /8), (/2 /4), (/2 3/8), (/2 /2), (/2 5/8), (/2 3/4), (/2 7/8), (/2 ) E plote em um gráfico... plot ([x1 x2 ...], [y1 y2 ..])
, (/2 /4), (/2 3/8), (/2 /2), (/2 5/8), (/2 3/4), (/2 7/8), (/2 ) E plote em um gráfico... plot ([x1 x2 ...], [y1 y2 ..])")
31
Exercício 3: Crie o robô da figura abaixo

32
Exercício 3: Crie o robô da figura abaixo

33
Para brincar em casa... Crie um robô PUMA: Brinque com ele:
mdl_puma560 %define um robô puma Brinque com ele: P560.teach() % permite controle Calcule a cinemática direta para o puma, em algumas posições diferentes a sua escolha.
 % permite controle. Calcule a cinemática direta para o puma, em algumas posições diferentes a sua escolha.")
34
Matlab help who: mostra as variáveis clear: limpa a memória.
clc: limpa a tela de comando. cd: muda de diretório. home: limpa a tela. help general: o básico workspace: mostra graficamente os objetos existentes.

Apresentações semelhantes