Carregar apresentação
A apresentação está carregando. Por favor, espere

1
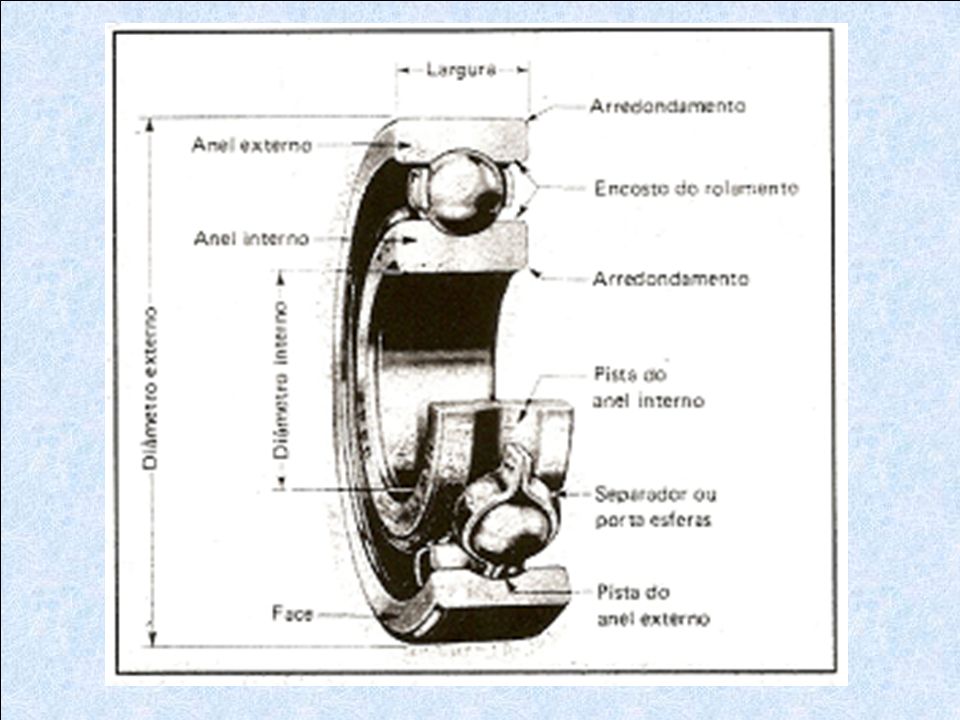
Capitulo 2- Sistemas Articulados
2.1- Mecanismos de 4 Barras (quadrilátero articulado)
")
2
Algumas características do mecanismo
Bastante simples e com grande utilidade Constituição Peça 1: Suporte => Geralmente estacionário. Peça 2: Manivela: - Geralmente é a peça acionadora => Pode girar ou oscilar; - Se ela gira => Transforma movimento de rotação em oscilação; - Se ela oscila => Multiplica o movimento de oscilação. Peça 3: Biela => Transmite movimento. Peça 4: Geralmente é a peça acionada => Gira ou oscila.

3
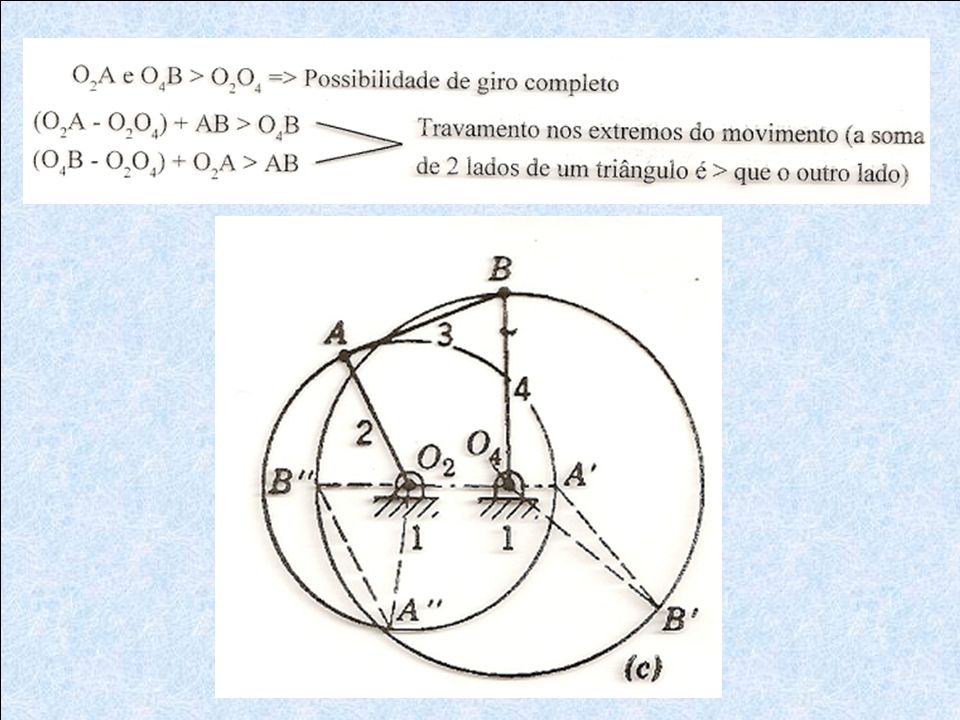
Considerações a respeito do travamento do mecanismo

4
Considerações a respeito do travamento do mecanismo
Se a peça 2 gira completamente => Não ocorre travamento; Se a peça 2 oscila: - Existe a possibilidade de travamento nas posições extremas; - Necessidade de estudo do comprimento das peças => Evitar os pontos mortos; Ponto Morto => Ocorre quando a linha de ação da força coincide com a direção da peça acionada;

5
Considere que a peça 2 oscila e seja a acionadora;
Consequências: - Ocorrerão 2 pontos mortos nos extremos do movimento; - Uso de inércia para prevenir o travamento do mecanismo => Volantes; -Ex: Pedal de máquinas de costura.

6
Lei dos Cossenos

7
Ângulo de transmissão Definido como ângulo entre a peça de ligação e a peça acionada=>γ

8
De volta ao nosso caso: mas Igualando (1) e (2) e isolando cos(γ)
 e (2) e isolando cos(γ)")
9
Recomendações práticas com relação ao ângulo de transmissão:
Máximo=140º Mínimo =40º Importante para a transmissão de forças grandes: - Atrito elevado nas articulações; - Previne o travamento pela tendência ao alinhamento.

11
Variantes do mecanismo de 4 barras
Mecanismo cruzado=> Peças 2 e 4 giram em sentido contrário

12
Mecanismo da locomotiva
Peças opostas possuem o mesmo comprimento (2 e 4) (1 e 3); Peças 2 e 4 permanecem paralelas; Peças 2 e 4 tem movimento de rotação. Obs: Cuidado com a possibilidade de inversão do sentido de rotação quando do alinhamento das peças => Uso da inércia.
 (1 e 3); Peças 2 e 4 permanecem paralelas; Peças 2 e 4 tem movimento de rotação. Obs: Cuidado com a possibilidade de inversão do sentido de rotação quando do alinhamento das peças => Uso da inércia.")
13
Manivela dupla Tanto a peça motriz (2) quanto a peça conduzida (4) giram; Se a peça 2 gira com velocidade constante => A velocidade da peça 4 é variável; Relações a serem observadas para evitar o travamento do mecanismo de manivela dupla:

15
Bloco deslizante => Alternativa construtiva para o balancim

16
Classificação dos mecanismos de 4 barras
Manivela – balancim => A peça 2 gira e a peça 4 oscila Manivela dupla=> As peças 2 e 4 giram Balancim duplo => As peças 2 e 4 oscilam

17
Lei de Grashoff Estabelece a forma de operação do mecanismo em função do comprimento de suas peças. Sendo: LM=> Peça de maior comprimento; Lm=> Peça de menor comprimento; L1 e L2 => Comprimento das outras 2 peças.

18
Caso 1=> LM + Lm ≤ L1 + L2 Se: Lm= Manivela; Peça fixa = Peça adjacente à manivela; Classificação => Manivela balancim (2 mecanismos diferentes). Lm= Peça fixa; Classificação => Manivela dupla. Peça oposta à menor for a fixa; Classificação => Balancim duplo.

19
Caso 2=> LM + Lm > L1 +L2
Será sempre balancim duplo. Inversões do mecanismo cursor-manivela Fixação da manivela: -Motores antigos de avião; - Alta inércia rotativa; - Efeito giroscópico.

20
Fixação da biela => Aplicação em algumas plainas limadoras

21
Fixação do cursor => Pouco usado => Bomba d’água manual

22
Cursor manivela por excêntrico
Robusto; Compacto; Lubrificação deficiente; Limitação da potência transmitida; - Uso em máquinas de funcionamento intermitente; Ex: Grampeador industrial, prensa mecânica, etc.

23
Obs: - Uso do volante de inércia; - Atua como armazenador de energia; - Permite a instalação de motores com menor potência nominal.

24
2.2- Mecanismo Cursor-Manivela
Generalidades Muito utilizado: - Motor de combustão interna; - Compressor de ar. Peças

25
Peça 1=> Peça fixa => Bloco do motor;
Peça 2=> Manivela => Virabrequim; Peça 3 => Biela; Peça 4=> Cursor => Pistão ou êmbolo.

26
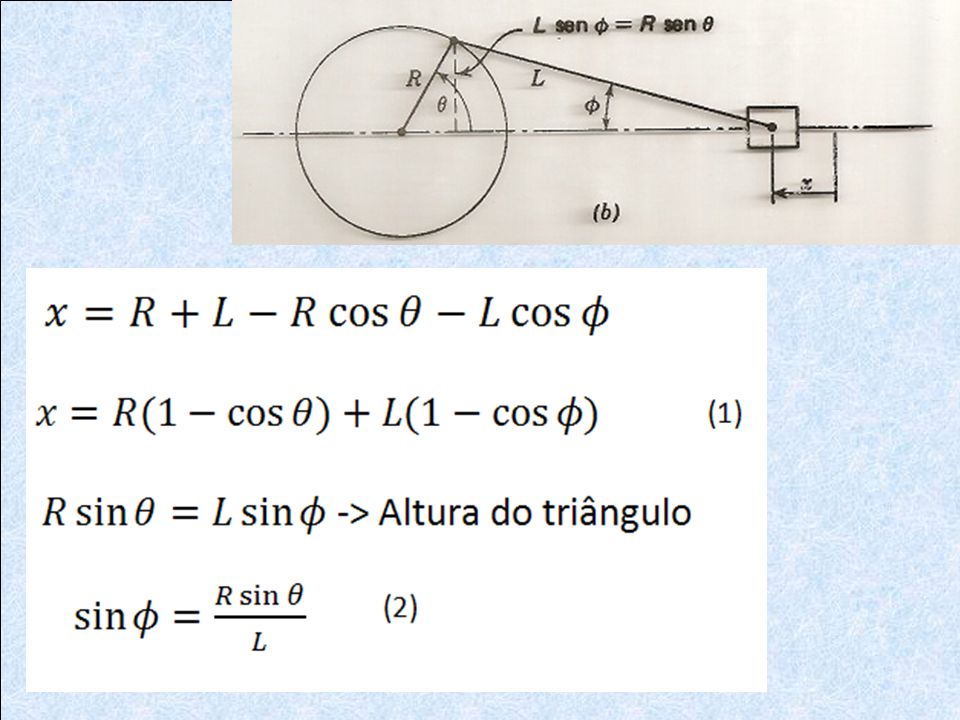
Equacionamento => Deslocamento, velocidade e aceleração do êmbolo

28
Mas: Substituindo

29
Desenvolvendo o termo:
Por meio de uma série binominal :

30
Para o caso em questão fica: Vale para
Fazendo: E retendo apenas os 2 primeiros termos da série:

31
Substituindo (6) em (5), tomando cuidado com o sinal:
 em (5), tomando cuidado com o sinal:")
32
Cálculo da velocidade do êmbolo:
Sendo:

33
Mas da relação trigonométrica, sabemos que:
Então:

34
Cálculo da aceleração do êmbolo:

35
Funcionamento Motor - A pressão dos gases atua na peça 4; - A força é transmitida à manivela 2 pela biela 3; - A abertura e fechamento sincronizado das válvulas controla o funcionamento; - Haverá 2 pontos mortos nas posições extremas do êmbolo => Peça acionadora; - Necessidade de colocação de um volante de inércia.

36
Compressor A manivela 2 é acionada por um motor externo; A força é transmitida ao êmbolo pela biela 3; A abertura e fechamento sincronizado das válvulas controla o funcionamento.

37
2.3- Garfo Escocês Generalidades
Gera movimento harmônico simples => Analogia com o círculo trigonométrico; Utilização: - Excitadores mecânicos; - Mecanismo de cálculo; - Equacionamento do movimento harmônico.

38
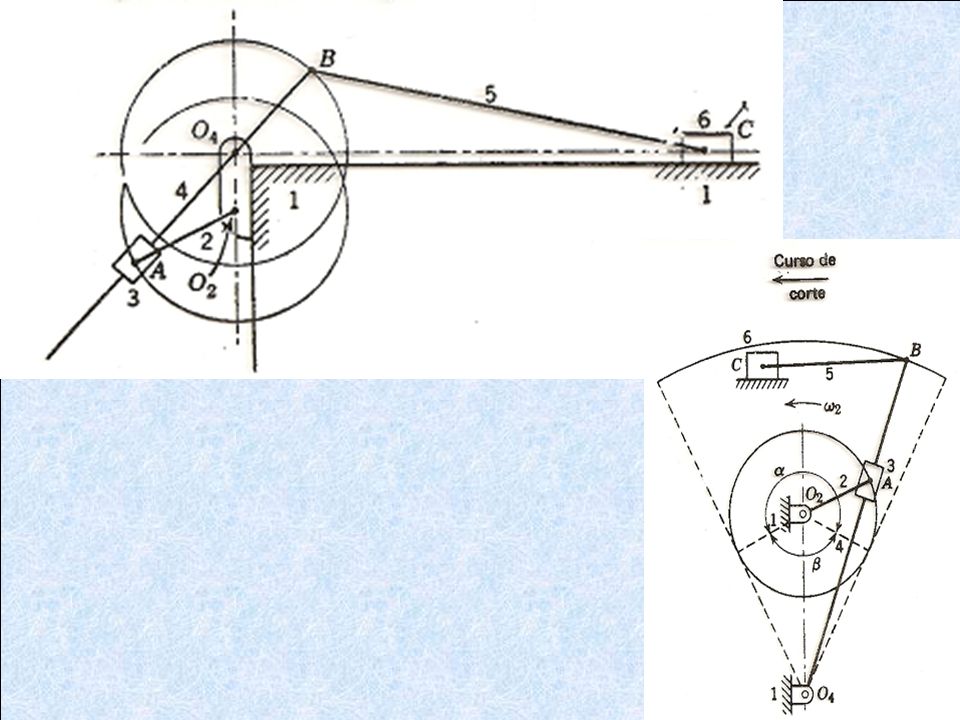
2.4- Mecanismo de Retorno Rápido
Generalidades Usado em máquinas operatrizes; Lógica de funcionamento: - Curso de trabalho lento; - Curso de retorno rápido => Ausência de esforço => Menor perda de tempo; Aplicável com velocidade de acionamento constante => Ex: Acionamento por motor elétrico; Razão de tempos => R= α/β α => Ângulo descrito pela manivela durante o curso útil; β => Ângulo descrito pela manivela durante o curso de retorno. Obs: R deve ser maior que 1 => O maior possível.

39
Tipos de mecanismo de retorno rápido => Baseados em 4 barras e cursor manivela
Mecanismo da plaina limadora - Variação do raio => Variação do curso; - Se O2O4 diminui => R (razão de tempos) aumenta; - Baseado em uma inversão do mecanismo cursor manivela.
 aumenta; - Baseado em uma inversão do mecanismo cursor manivela.")
41
Mecanismo de manivela dupla e cursor
Derivado do mecanismo de 4 barras; Peça 2 gira com velocidade constante; Peça 4 gira com velocidade não uniforme; Aproveita a não uniformidade do movimento; - Parte rápida => Executa trabalho; - Parte lenta=> Faz o retorno.

42
Mecanismo de Whitworth
Baseado em uma inversão do mecanismo cursor manivela; Peças 2 e 4 fazem voltas completas.

44
Manivela deslocada Efeito de retorno rápido muito pequeno; Uso em aplicações com limitação de espaço.

45
2.5- Alavanca Articulada

46
Objetivo do mecanismo => Vencer uma grande resistência com uma pequena força motriz;
Aplicações: - Britadores; - Fixação de peças => Rebitadeiras;

47
Obs: Peças 4 e 5 tem o mesmo comprimento

49
2.6-Junta de Oldham Composta de 3 peças ranhuradas deslizantes;
Usada para fazer o acoplamento de eixos paralelos desalinhados.

50
2.7- Mecanismos Traçadores de Retas
Um ponto de suas peças se move em linha reta => Resultado aproximado ou exato; Mecanismo de Watt Resultado aproximado; AP e BP são inversamente proporcionais a O2A e O4B.

53
Mecanismo de Peaucellier => Resultado exato
Baseado em semelhança de triângulos : O2O4 = O2A (3=4) e (5 = 6 =7 = 8) Exemplos de uso: - Acionamento de disjuntores; - Indicadores lineares.
 e (5 = 6 =7 = 8) Exemplos de uso: - Acionamento de disjuntores; - Indicadores lineares.")
54
2.8- Pantógrafo Generalidades Mecanismo usado para copiar;
Permite a aplicação de uma escala na cópia => Ampliação ou redução.

55
Constituição e funcionamento
Peças 2, 3, 4 e 5 são iguais => Paralelogramo; P está situado numa extensão da peça 4; Q está na peça 5 na interseção com a linha OP; Semelhança de triângulos: - Ângulo em B = Ângulo em C; - A proporção PC/PB é mantida.

56
Exemplos de uso: Máquinas de gravação => Letras pequenas; Operação de equipamentos perigosos => Maçaricos; Confecção de matrizes e moldes.

57
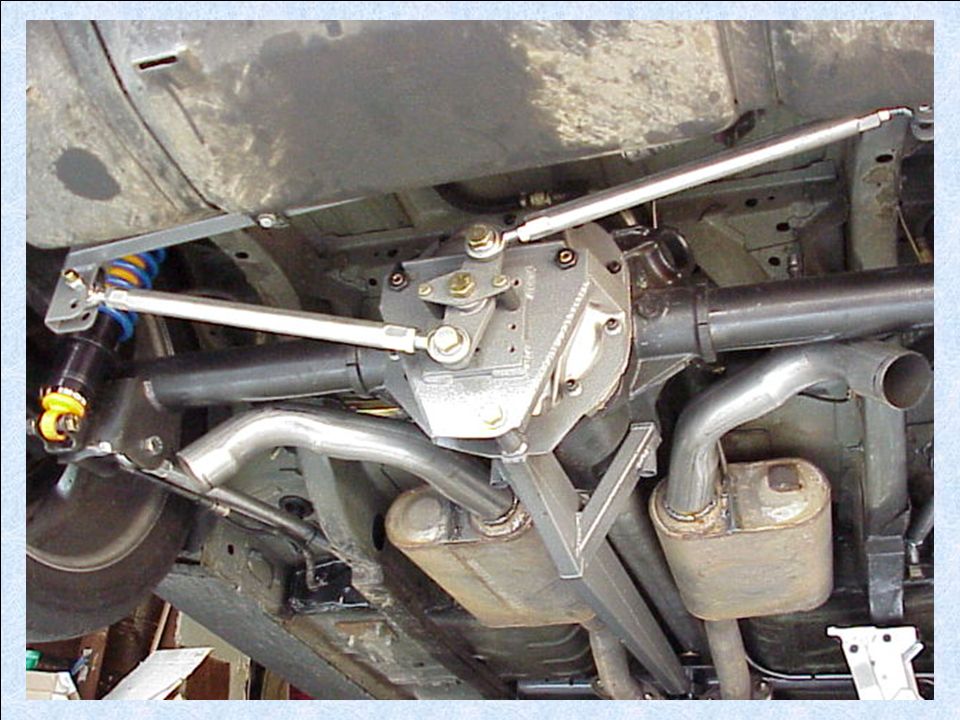
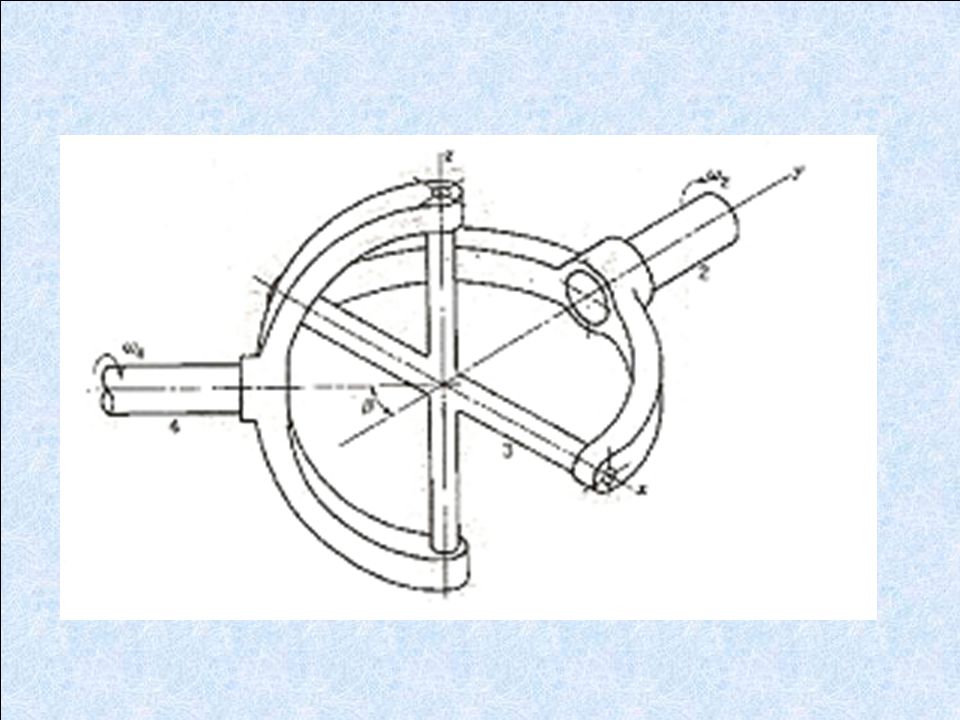
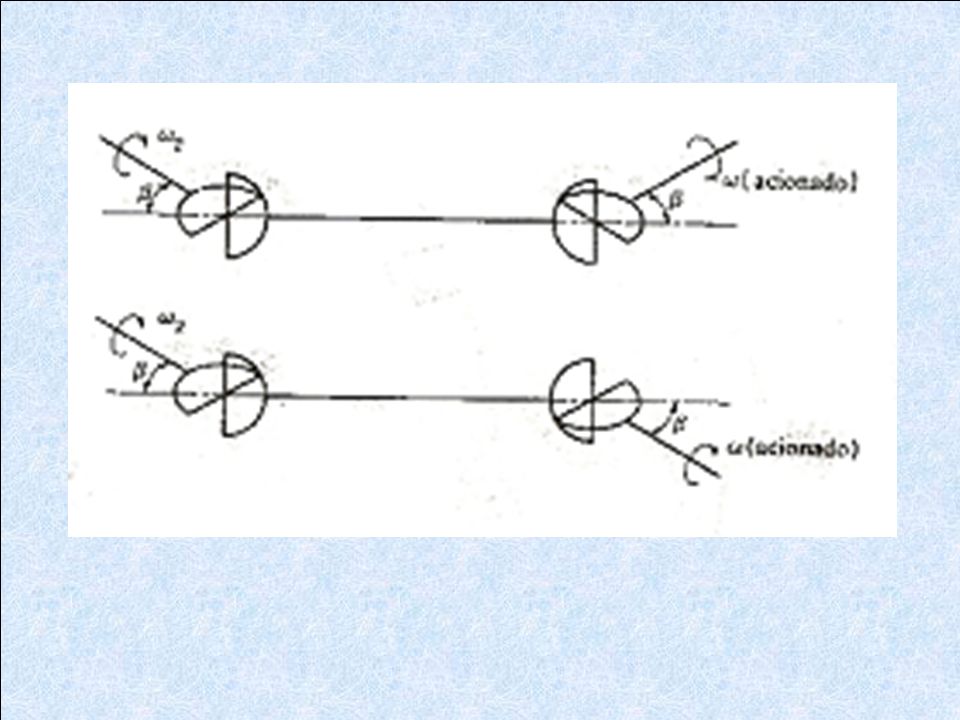
2.9-Junta Universal ou Junta de Hook (cruzeta)
Usada para interligar eixos que se cruzam Exemplos: - Semi –eixos de automóveis, eixo cardan; Barra de direção de automóveis; Acionamento de máquinas; Eixos articulados de ferramentas.

58
Observações a respeito do funcionamento
Os dois eixos completam uma revolução no mesmo tempo; A razão de velocidade não será constante => Principal deficiência; - Função do ângulo entre os eixos => β; - Função do ângulo de rotação do eixo matriz.

59
Representação gráfica da equação

60
Inconveniente => Acionamento a velocidade constante => Eixo acionado com velocidade variável.
Exemplo: Transmissão de um veículo - Eixo acionado com velocidade variável; - Inércia do veículo resiste à variação da velocidade; - Sobrecarga dos componentes mecânicos => Deslizamento dos pneus; - Vida útil reduzida => Quebra mais frequentes.

61
Uso do eixo intermediário
Ângulos iguais => Anulamento dos efeitos

62
Exemplo: - Eixo cardan de veículos com tração traseira; - Semi-eixos de veículos com tração traseira; Inadequação ao uso em veículos com tração dianteira.

63
2.10-Juntas Homocinéticas
Motivação=> Veículos com tração dianteira => Melhor utilização do espaço. Objetivo => Transmitir movimento de rotação com razão de velocidade constante. Principais tipos:

67
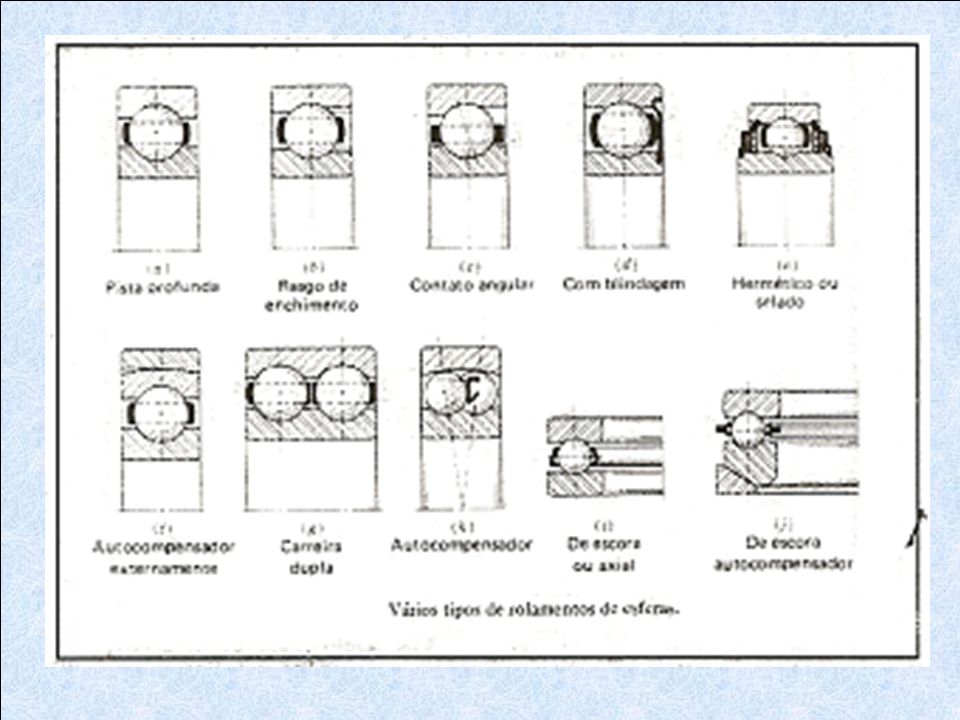
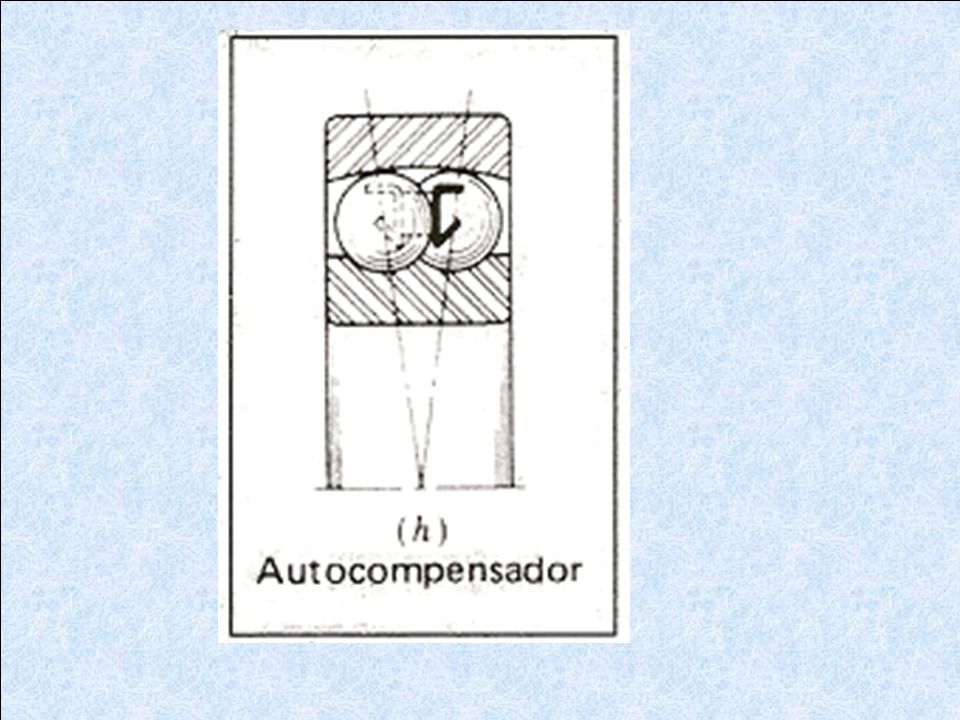
Rzepa Mais utilizada; Semelhante a um rolamento autocompensador travado.

69
Bendix –Weiss Movimento restrito ao plano bissetor; Auto ajustável.

70
Tracta

71
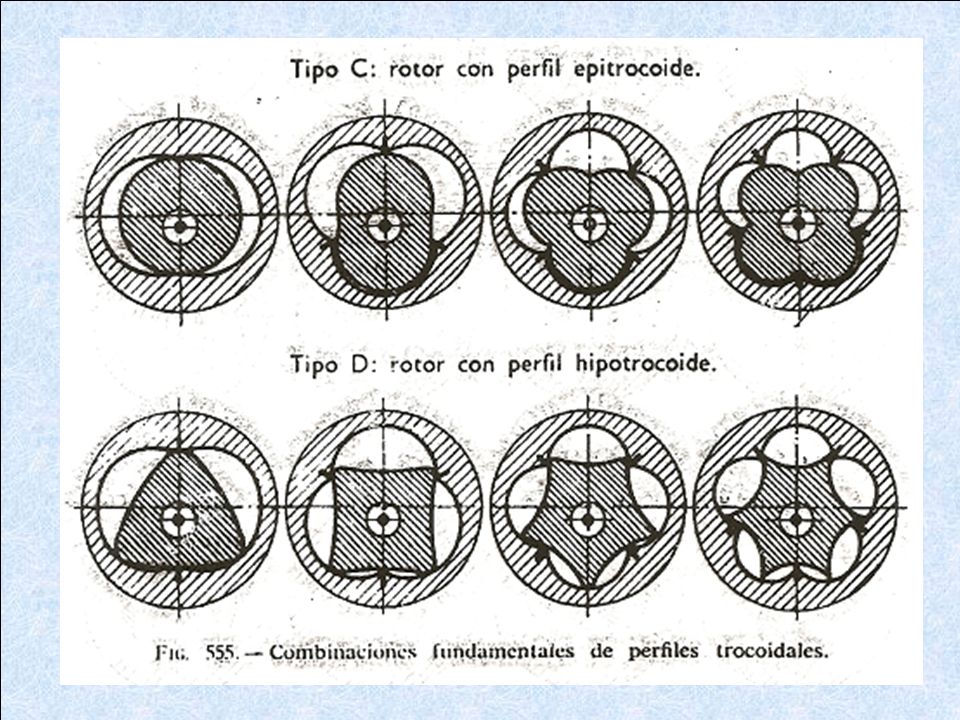
2.11- Rotores de Câmara Mecanismos diversos caracterizados por:
Uma câmara que serve de fronteira para o movimento; Um ou mais rotores girando dentro da câmara. Exemplos Soprador Roots; - Rotores cicloidais; - Grande volume deslocado a uma baixa pressão.

73
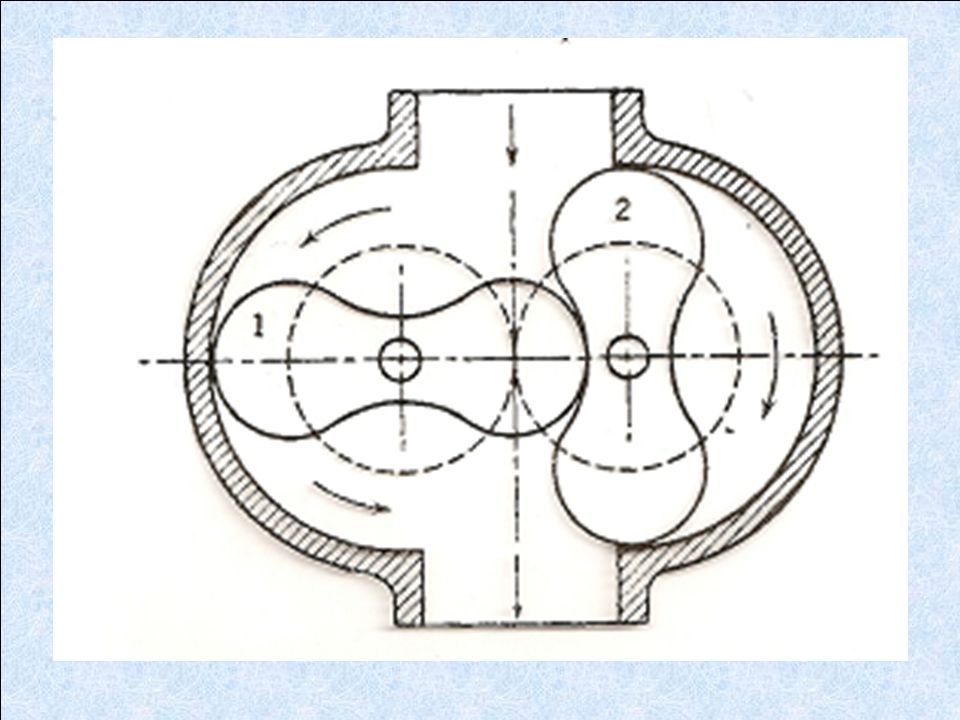
Bomba de engrenagens

74
Rotor de palhetas

76
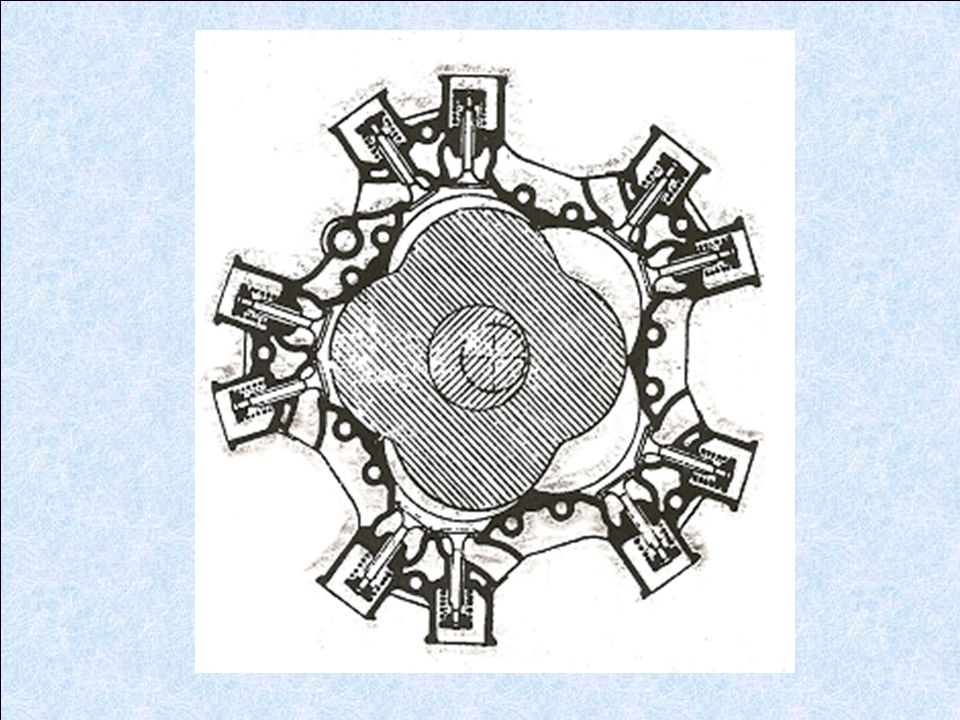
Motor Wankel

78
Formas construtivas alternativas

80
2.12- Mecanismo de movimento intermitente
Finalidade básica => Transformar um movimento contínuo em intermitente. Roda de Genebra - Gera movimento intermitente => Usada em dispositivo de posicionamento; - Diminui o choque de acoplamento => Geometria. Constituição Peça acionadora =>1 Peça conduzida => 2 Pino acionador => P

82
Sulco tangente à trajetória do ponto P no acoplamento e na separação;
Ângulo O1PO2 será sempre reto; Ângulo descrito em cada operação = 2β ; Necessidade de um dispositivo de retenção => (Disco convexo) x (Roda côncava).
 x (Roda côncava).")
83
Mecanismo de catraca Gera movimento circular intermitente a partir de uma oscilação ou movimento alternativo. Aplicação: - Contadores - Esticadores - Guinchos

84
Mecanismo de engrenamento intermitente
Aplicações onde o choque no acoplamento for admissível; Peça acionadora (1 dente) => Peça acionada (vários vãos de dentes); Necessidade de um dispositivo de retenção => Formato côncavo/ convexo.
 => Peça acionada (vários vãos de dentes); Necessidade de um dispositivo de retenção => Formato côncavo/ convexo.")
85
2.13- Formulação Analítica Mecanismos de 4 Barras
Utiliza formulação vetorial para a representação dos deslocamentos, das velocidades e das acelerações. A juntas e uniões são representadas através de equações de restrição. O uso de número complexos para representar os vetores também é possível, porém pode resultar em um esforço computacional maior.

86
Representação Vetorial
Para o desenvolvimento de um modelo analítico define-se a posição de um ponto em relação aos demais:

87
Representação Vetorial
Para o desenvolvimento de um modelo analítico define-se a posição de um ponto em relação aos demais:

88
Representação Vetorial
Notação:

89
Representação Vetorial

90
Representação Vetorial

91
Representação Vetorial

92
Análise de Mecanismos de Quatro Barras

93
Análise de Mecanismos de Quatro Barras
Acionamento pela BARRA 02 Isolando o ângulo 03 têm-se: Equação transcendental que relaciona os ângulos 2 e 4.

94
Análise de Mecanismos de Quatro Barras
Acionamento pela BARRA 02 Substituindo-se a equação abaixo na equação de r3 têm-se: O que conduz a:

95
Análise de Mecanismos de Quatro Barras
Acionamento pela BARRA 02 Após substituição têm-se: O que conduz a:

96
Análise de Mecanismos de Quatro Barras
Acionamento pela BARRA 02

97
Análise de Mecanismos de Quatro Barras
Acionamento pela BARRA 02

98
Análise de Mecanismos de Quatro Barras
Acionamento pela BARRA 02

99
Análise de Mecanismos de Quatro Barras

100
Análise de Mecanismos de Quatro Barras
O vetor r1 deve ser sempre paralelo ao deslocamento do cursor. O vetor r1 deve ser sempre perpendicular ao vetor r4.

101
Análise de Mecanismos de Quatro Barras

102
Análise de Mecanismos de Quatro Barras

103
Análise de Mecanismos de Quatro Barras
Se ocorrer uma solução para r1 complexa o mecanismo assume uma das seguintes formas:

104
Análise de Mecanismos de Quatro Barras
Quando se conhece r1 :

105
Análise de Mecanismos de Quatro Barras
Se t for um número complexo o mecanismo não monta

106
Análise de Mecanismos de Quatro Barras
Quando o cursor é responsável pelo acionamento Quando uma das barras é responsável pelo acionamento

107
Análise de Mecanismos de Quatro Barras
Quando uma das barras é responsável pelo acionamento

108
Análise de Mecanismos de Quatro Barras
Quando o cursor é responsável pelo acionamento

Apresentações semelhantes