Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Outras Técnicas Quantitativas
Análise de Filas Análise do Ponto de Equilíbrio Modelagem PERT/CPM Programação Linear Programação Não-Linear Simulação

2
Aonde Gastamos nosso Tempo
aguardando em semáforos 6 meses abrindo correspondência sem utilidade 8 meses procurando por objetos mal guardados 1 ano tentando, sem sucesso, retornar ligações Esta pesquisa, válida para os USA, mostra o quanto tempo desperdiçamos em filas; para o Brasil, necessariamente, os valores seriam bem maiores: por isto é importante projetarmos sistemas de atendimento adequados. 2 anos 4 anos – fazendo trabalhos domésticos 5 anos – esperando em filas 6 anos – alimentando-nos

3
Elementos da Análise de Filas de Espera
uma seqüência única de espera por serviço. O sistema da Fila consiste de: chegadas atendimento estrutura ou disciplina da fila Analisar cada uma das definições

4
Elementos da Análise de Filas de Espera
População demandadora do serviço: chegam das “fontes” de clientes. infinito - grande o suficiente de tal modo que um ou mais clientes podem sempre chegar para serem servidos. finito - número de potenciais clientes é finito. Taxa de chegada () é a freqüência de chegada de clientes ao sistema da fila. normalmente acompanha uma distribuição de Poisson. Analisar cada uma das definições
 é a freqüência de chegada de clientes ao sistema da fila. normalmente acompanha uma distribuição de Poisson. Analisar cada uma das definições.")
5
Características Operacionais
Características operacionais são aquelas variáveis que descrevem o desempenho de um sistema. Estado de equilíbrio é a situação que o sistema atinge após um longo tempo de operação, apresentando características de desempenho constantes e dentro de uma média. As fórmulas da Teoria das filas não indicam as soluções ótimas e sim permitem simular situações diversas para “trade-offs” entre custos e níveis de serviço. Analisar cada uma das definições

6
Chegada POISSON a distribuição é totalmente caracterizada pela média
Probabilidade de chegada de certo número de clientes por hora segue uma distribuição de Poisson (descontínua). Hipóteses: A probabilidade de mais de uma ocorrência em um único ponto é desprezível. (Dois clientes chegando no mesmo instante). O número de ocorrências em qualquer intervalo é independente do número de ocorrências em outros intervalos. Comentar as características da distribuição de POISSON, muito utilizada na teoria de filas para descrever a probabilidade de chegadas.
. Hipóteses: A probabilidade de mais de uma ocorrência em um único ponto é desprezível. (Dois clientes chegando no mesmo instante). O número de ocorrências em qualquer intervalo é independente do número de ocorrências em outros intervalos. Comentar as características da distribuição de POISSON, muito utilizada na teoria de filas para descrever a probabilidade de chegadas.")
7
Chegada POISSON = / Tempo de serviço
geralmente segue uma distribuição exponencial negativa tempo médio de serviço = A taxa de chegada () precisa ser menor que a taxa de serviço ou o sistema nunca se esvazia (clientes eternamente não atendidos) Taxa de Atendimento (ou utilização) Analisar cada uma das definições = /
 precisa ser menor que a taxa de serviço ou o sistema nunca se esvazia (clientes eternamente não atendidos) Taxa de Atendimento. (ou utilização) Analisar cada uma das definições. = / ")
8
Componentes do Sistema Fila
Bloco de clientes Chegadas Linha de espera ou Fila Posto de Serviço Clientes Servidos Analisar cada um dos elos

9
Comprimento e Disciplina da Fila
Ordem na qual os clientes são atendidos. Por ordem de chegada (first come, first served) é o mais comum. Comprimento pode ser finito ou infinito Infinito é o mais comum. Quando há algum limite físico, o comprimento pode ser finito. Às vezes, comprimento da fila é determinado pela percepção de serviço (desistência com fila muito grande). Analisar cada uma das definições
 é o mais comum. Comprimento pode ser finito ou infinito. Infinito é o mais comum. Quando há algum limite físico, o comprimento pode ser finito. Às vezes, comprimento da fila é determinado pela percepção de serviço (desistência com fila muito grande). Analisar cada uma das definições.")
10
Estrutura Básica da Fila de Espera
Canais Referem-se ao número de postos de serviço paralelos que podem atender à demanda (maior número de canais, melhor nível de serviço e maior custo de servir). Fases Referem-se ao número de postos de serviço pelos quais um cliente deve passar para ser atendido (maior número diminui nível de serviço e melhora a produtividade). Analisar cada uma das definições
. Fases. Referem-se ao número de postos de serviço pelos quais um cliente deve passar para ser atendido (maior número diminui nível de serviço e melhora a produtividade). Analisar cada uma das definições.")
11
Canais Únicos Canal único com fase única Canal único, múltiplas fases
fila posto de serviço Canal único, múltiplas fases Analisar os sistemas de filas e atendimento fila postos de serviço

12
Estrutura de Multi-Canais
Múltiplo canais, fase única postos de serviço Múltiplo canais, múltiplas fases Analisar os sistemas de filas e atendimento fila postos de serviço

13
Características Operacionais
Notação Descrição L Número médio de clientes no sistema (esperando e recebendo o serviço) Lq Número médio de clientes na fila T Tempo médio que um cliente despende no sistema (esperando e sendo servido) Tq Tempo médio que um cliente gasta na fila Analisar cada uma das definições
 Lq Número médio de clientes na fila T Tempo médio que um cliente despende no sistema (esperando e sendo servido) Tq Tempo médio que um cliente gasta na fila Analisar cada uma das definições.")
14
Modelo Básico para Atendimento Único
Hipóteses: chegada Poisson tempo de serviço exponencial primeiro a chegar, primeiro a ser atendido fila com comprimento infinito demanda de clientes infinita Número de canais (K = 1) = tempo médio de chegada = tempo médio de atendimento Analisar cada uma das definições
 = tempo médio de chegada. = tempo médio de atendimento. Analisar cada uma das definições.")
15
Fórmulas para Modelo de Atendimento Único
Taxa de utilização do sistema Tempo médio que um cliente gasta no sistema T = Número médio de clientes no sistema L = Tempo médio gasto pelo clientes na fila Tq = Analisar cada uma das definições Número médio de clientes na fila Lq =

16
Exemplo Dados: chegada = 24 por hora, atendimento = 30 clientes por hora, calcular: Número médio de clientes no sistema L = = 24/(30-24) = 4 Número médio de clientes na fila Lf = = 242/30(30-24) = 3.2 Tempo médio que um cliente gasta no sistema Comentar a aplicação e aplicabilidade das fórmulas de filas; alertar para o fato de que, mesmo com médias de atendimento maiores que as de chegadas (média de atendimento é de 30 por hora e de chegada é de 24 por hora) haverá fila!! T = = 1(30-24) = hr = 10 min Tempo médio que o cliente gasta na fila Tf = = 24/30(30-24) = hr = 8 min
 = 4. Número médio de. clientes na fila. Lf = = 242/30(30-24) = 3.2. Tempo médio que um cliente. gasta no sistema. Comentar a aplicação e aplicabilidade das fórmulas de filas; alertar para o fato de que, mesmo com médias de atendimento maiores que as de chegadas (média de atendimento é de 30 por hora e de chegada é de 24 por hora) haverá fila!! T = = 1(30-24) = hr = 10 min. Tempo médio que o cliente. gasta na fila. Tf = = 24/30(30-24) = hr = 8 min.")
17
Modelos de Atendimento Múltiplo
Hipóteses: chegada Poisson tempo de serviço exponencial primeiro a chegar, primeiro a ser atendido fila com comprimento infinito demanda de clientes infinita Número de canais (K > 1) = tempo médio de chegada = tempo médio de atendimento
 = tempo médio de chegada. = tempo médio de atendimento.")
18
Fórmulas para Atendimento Múltiplo
Taxa de utilização do sistema U = k = 24/(2x30) = 0,4 Número médio de clientes na fila Lf - Consultar Tabela (/) \ k Tempo médio que um cliente gasta no sistema T = Tf + (60/) = 0,0415m + 2 = 2,0415m Tempo médio gasto pelo clientes na fila Tf = Lf / = 0,0166 / 24 x 60 = 0,0415min
 = 0,4. Número médio de. clientes na fila. Lf - Consultar Tabela (/) \ k. Tempo médio que um cliente. gasta no sistema. T = Tf + (60/) = 0,0415m + 2 = 2,0415m. Tempo médio gasto pelo. clientes na fila. Tf = Lf / = 0,0166 / 24 x 60 = 0,0415min.")
19
Tabela (/) \ k (/) \ k 1 2 3 4 5 0,10 0,0111 0,20 0,0500 0,0020
0,30 0,1285 0,0069 0,40 0,2666 0,0166 0,50 0,5000 0,0333 0,0030 0,60 0,9000 0,0593 0,0061 0,70 1,6333 0,0976 0,0112 0,80 3,2000 0,1523 0,0189 0,90 8,1000 0,2285 0,0300 0,0041 1,00 0,3333 0,0454 0,0067 1,20 0,6748 0,0904 0,0158 1,40 1,3449 0,1778 0,0324 0,0059

20
Relação dos Custos em Análise de Filas
Custo Total Custo Esperado Custo do Serviço Curva genérica que vale para análise e determinação de políticas de atendimento e gestão da capacidade: trade-off entre investimento em atendimento e prestação do serviço versus custos da espera por parte do cliente (custos tangíveis = tempo e instalações disponibilizadas e intangíveis = satisfação e imagem) Custo de espera Nível de Serviço
 Custo de espera. Nível de Serviço.")
21
Vantagem Competitiva e a Teoria das Filas
Na visão tradicional, o nível de serviço deveria coincidir com o ponto de mínimo custo total da curva. A visão de Diferenciação é a de que um nível de serviço melhor ocasiona, a longo prazo, custos menores (é mais eficaz). Analisar o trade-off com a participação da classe; perguntar sobre casos e experiências pessoais e correlacioná-los com a teoria.
. Analisar o trade-off com a participação da classe; perguntar sobre casos e experiências pessoais e correlacioná-los com a teoria.")
22
Aguarde sua vez, por favor...
A percepção de fila é diferente para: Esperar antes da hora marcada Esperar após a hora marcada Esperar em fila organizada (primeiro a chegar, primeiro a ser atendido) é menos estressante. É diferente esperar em situações nas quais o provedor está fazendo o possível para atender (Avião ou médico) X situações de aparente relapso (Banco ou lanchonete) Algumas medidas e sistemas de gestão podem reduzir a tensão e descontentamentos por se ter de aguardar em filas.
 é menos estressante. É diferente esperar em situações nas quais o provedor está fazendo o possível para atender (Avião ou médico) X. situações de aparente relapso (Banco ou lanchonete) Algumas medidas e sistemas de gestão podem reduzir a tensão e descontentamentos por se ter de aguardar em filas.")
23
Percepção do Tempo na Fila
10 Instrumentos de Gestão: Senha e informação Distração Conforto Atividades antecipadas Imagem de estar fazendo o (im)possível para atender rápido sem gestão Tempo percebido na fila (minutos) objetivo para o gerenciamento 5 A percepção de tempo de espera é diferente do real, principalmente após 3 minutos de espera e para sistemas de atendimento que não incluam providências de gestão 3 5 10 Tempo real na fila (minutos)
possível para atender rápido. sem gestão. Tempo percebido na fila (minutos) objetivo para o gerenciamento. 5. A percepção de tempo de espera é diferente do real, principalmente após 3 minutos de espera e para sistemas de atendimento que não incluam providências de gestão Tempo real na fila (minutos)")
24
Espera e Qualidade Percebida do Serviço
Como o tempo foi preenchido (-) Incerteza (-) (+) (+) Atraso A relação entre avaliação dos serviços prestados e o sistema de gestão de filas, segundo pesquisas, apresenta as seguintes interdependências: comentar cada uma delas, tais como: quanto mais o tempo é preenchido menor incerteza e menor aborrecimento; quanto mais atraso mais incerteza e mais aborrecimento; quanto mais incerteza mais aborrecimento, etc. Um sistema mal dimensionado gera percepção de baixa qualidade do serviço, independente do esforço e aplicação dos seus funcionários. (-) (+) Aborrecimento Avaliação do Serviço O provedor poderia evitar o atraso (+)
 Incerteza. (-) (+) (+) Atraso. A relação entre avaliação dos serviços prestados e o sistema de gestão de filas, segundo pesquisas, apresenta as seguintes interdependências: comentar cada uma delas, tais como: quanto mais o tempo é preenchido menor incerteza e menor aborrecimento; quanto mais atraso mais incerteza e mais aborrecimento; quanto mais incerteza mais aborrecimento, etc. Um sistema mal dimensionado gera percepção de baixa qualidade do serviço, independente do esforço e aplicação dos seus funcionários. (-) (+) Aborrecimento. Avaliação. do Serviço. O provedor poderia evitar o atraso. (+)")
25
Filas (fila de pessoas)
Estoques (fila de materiais) Empata capital Requer armazém Defeitos são escondidos Estoques tornam estágios independentes Estoques em processo mantém processo ocupado Evita ter que sincronizar o fluxo Filas (fila de pessoas) Desperdiça tempo Requer áreas de espera Gera impressão negativa Permite divisão do trabalho e especialização Clientes esperando mantém os servidores ocupados Evita ter que adequar fornecimento e demanda Aproveite este slide para mostrar como o JIT pode ser usado em operações de serviços. Alguns princípios do JIT para manufatura têm sua analogia para serviços. Veja na página 500 do nosso livro texto um mini-caso (Princípios do JIT no Little Chef) que é um ótimo exemplo de aplicação dos princípios do JIT em empresa de serviço.
 Empata capital. Requer armazém. Defeitos são escondidos. Estoques tornam estágios independentes. Estoques em processo mantém processo ocupado. Evita ter que sincronizar o fluxo. Filas (fila de pessoas) Desperdiça tempo. Requer áreas de espera. Gera impressão negativa. Permite divisão do trabalho e especialização. Clientes esperando mantém os servidores ocupados. Evita ter que adequar fornecimento e demanda. Aproveite este slide para mostrar como o JIT pode ser usado em operações de serviços. Alguns princípios do JIT para manufatura têm sua analogia para serviços. Veja na página 500 do nosso livro texto um mini-caso (Princípios do JIT no Little Chef) que é um ótimo exemplo de aplicação dos princípios do JIT em empresa de serviço.")
26
Abordagem de Management Science no processo de tomada de decisão
Management Sciences área de estudos que utiliza computadores, estatística e matemática para resolver problemas de negócios. Três objetivos inter-relacionados: Converter dados em informações significativas. Apoiar a tomada de decisão transferíveis e independentes. Criar sistemas úteis para usuários não técnicos.

27
Abordagem da Management Science conversão de dados em informações
Números e Fatos Processamento de Dados Dados Sist.de Informação Gerencial Informações Sistemas de Apoio à Decisão Decisões Sistemas Especialistas Insights

28
Modelo de Computador Modelo de Computador é um conjunto de relações matemáticas e hipóteses lógicas implementadas em computador como uma representação de um problema real de tomada de decisão. Durante a última década foi observado que uma das maneiras mais efetivas de se resolver problemas de negócios consiste na utilização de modelos de computador baseados em planilhas eletrônicas.

29
Processo de Modelagem Análise Modelo Resultado Mundo Simbólico
Julgamento Gerencial Abstração Interpretação Mundo Real Situação Gerencial Decisões Intuição

30
Processo de Modelagem Força os decisores a tornarem explícitos seus objetivos. Força a identificação e armazenamento das diferentes decisões que influenciam os objetivos. Força a identificação e armazenamento dos relacionamento entre as decisões. Força a identificação das variáveis a serem incluídas e em que termos elas serão quantificáveis. Força o reconhecimento de limitações. Permitem a comunicação de suas idéias e seu entendimento para facilitar o trabalho de grupo.

31
Processo de Modelagem Realismo Intuição
Um modelo só tem valor se o seu uso provoca melhores decisões. Intuição Modelos quantitativos e intuição gerencial não se encontram em lados opostos. Intuição é crucial durante a interpretação e implementação.

32
Modelos Simbólicos Características
Um modelo sempre simplifica a realidade. Um modelo simbólico deve conter detalhes suficientes para que: Os resultados atinjam suas necessidades O modelo seja consistente com os dados O modelo possa ser analisado no período de tempo disponível a sua concepção

33
Modelos de Tomada de Decisão
São modelos simbólicos nos quais algumas variáveis representam decisões que devem ser tomadas. Variáveis Exógenas Variáveis Endógenas Modelo Variáveis Explicativas Variáveis Dependentes

34
Modelos de Tomada de Decisão
Modelos Determinísticos São modelos nos quais todas as variáveis relevantes são assumidas como certas e disponíveis. Modelos Probabilísticos ou Estocásticos São modelos nos quais uma ou mais variáveis não são conhecidas com certeza. Variáveis Randômicas ou Aleatórias

35
Tipos de Modelagem Modelagem Dedutiva Modelagem Inferencial
Hipóteses das variáveis relevantes e suas interligações. Modelagem de Cima para Baixo, maior peso no conhecimento do modelador a respeito das variáveis e parâmetros Modelagem Inferencial Análise dos dados para estabelecimento das relações entre variáveis. Modelagem de Baixo para Cima

36
Modelos de Tomada de Decisão
MODELAGEM DEDUTIVA Modelagem Decisória Árvore de Decisão Teoria de Filas Modelagem Decisória Projeções Se Então Otimização Modelos Probabilísticos Modelos Determinísticos Prezado Professor Situar que o curso de m Análise de Dados Estimação de Parâmetro Pesquisa em Banco de Dados Previsão de dados Simulação Análise Estatística Estimação de Parâmetro Modelagem MODELAGEM INFERENCIAL

37
Modelo Caixa Preta Modelo Caixa Preta Variáveis de Decisão Parâmetros
Performance Conseqüências

38
Análise de Ponto de Equilíbrio
Muitas vezes desejamos descobrir qual a quantidade mínima que devemos produzir para viabilizarmos a produção de um produto. Este estudo se chama ponto de equilíbrio e se baseia nas equações de Receita e Custos de um determinado produto.

39
Análise do ponto de equilíbrio
200 100 400 300 600 500 5 10 15 20 25 30 35 40 Custo Fixo Custo Variável Custo Total Lucro Prejuízo Ponto de equilíbrio Receita de vendas

40
Análise de Ponto de Equilíbrio Diagrama de Blocos
Resultado Equação de Demanda Oferta Modelo Quantidade Demandada Preço Ofertada Variáveis

41
Caso LCL Impressoras Ltda.
A LCL Impressoras Pessoais, líder na produção de impressoras no Brasil, espera lançar um novo tipo de impressora laser colorida de baixo custo. Para tal fez uma pesquisa junto aos consumidores potenciais para determinar a demanda que teria para cada tipo de preço. Ao mesmo tempo fez um levantamento dos custos fixos e variáveis para junto com o preço determinar uma curva de oferta. Com as informações são apresentadas a seguir determine o preço de equilíbrio e a quantidade de equilíbrio.

42
Caso LCL Impressoras Ltda.

43
Caso LCL Impressoras Ltda. Equação de Receita

44
Caso LCL Impressoras Ltda. Equação de Custo Total

45
Caso LCL Impressoras Ltda. Ponto de Equilíbrio

46
Caso LCL Impressoras Ltda. Ponto de Equilíbrio

47
Problemas de Otimização
Em problemas reais de otimização busca-se maximizar ou minimizar uma quantidade específica, chamada objetivo, que depende de um número finito de variáveis de entrada. As variáveis de entrada podem ser: Independentes uma das outras. Relacionadas uma com as outras por meio de uma ou mais restrições.

48
Aplicações de Otimização Matemática
Determinação de Mix de Produtos Scheduling Roteamento e Logística Planejamento Financeiro

49
Programação Matemática
Um problema de programação matemática é um problema de otimização no qual o objetivo e as restrições são expressos como funções matemáticas e relações funcionais

50
Variáveis de Decisão x1 , x2,...,xn , são as chamadas Variáveis de Decisão. As variáveis de decisão são aqueles valores que representam o cerne do problema, e que podemos escolher (decidir) livremente. As variáveis de decisão representam as opções que um administrador têm para atingir um objetivo. Quanto produzir para maximizar o lucro? Quanto comprar de uma ação para minimizar o risco da carteira?
 livremente. As variáveis de decisão representam as opções que um administrador têm para atingir um objetivo. Quanto produzir para maximizar o lucro Quanto comprar de uma ação para minimizar o risco da carteira")
51
Programação Linear Um problema de programação matemática é linear se a função-objetivo e cada uma das funções que representam as restrições forem lineares, isto é, na forma abaixo: e ) ,..., , ( 2 1 n x f
 ,..., , ( n. x. f.")
52
Quebrando a Linearidade
A presença de qualquer das expressões abaixo tornam o problema não linear. Exemplos: 52

53
Programação Linear Exemplos

54
Programação Linear Áreas de Aplicação
Administração da Produção Análise de Investimentos Alocação de Recursos Limitados Planejamento Regional Logística Custo de transporte Localização de rede de distribuição Alocação de Recursos em Marketing entre diversos meios de comunicação.

55
Programação Linear Hipótese de Aditividade
Considera as atividades (variáveis de decisão) do modelo como entidades totalmente independentes, não permitindo que haja interdependência entre as mesmas, isto é, não permitindo a existência de termos cruzados, tanto na função-objetivo como nas restrições.
 do modelo como entidades totalmente independentes, não permitindo que haja interdependência entre as mesmas, isto é, não permitindo a existência de termos cruzados, tanto na função-objetivo como nas restrições.")
56
Programação Linear Hipótese de Proporcionalidade
O valor da função-objetivo é proporcional ao nível de atividade de cada variável de decisão, isto é, o valor da função-objetivo se altera de um valor constante dada uma variação constante da variável de decisão;

57
Programação Linear Hipótese de Divisibilidade
Assume que todas as unidades de atividade possam ser divididas em qualquer nível de fracionamento, isto é, qualquer variável de decisão pode assumir qualquer valor positivo fracionário. Esta hipótese pode ser quebrada, dando origem a um problema especial de programação linear, chamado de problema inteiro.

58
Programação Linear Hipótese de Certeza
Assume que todos os parâmetros do modelo são constantes conhecidas. Em problemas reais quase nunca satisfeita as constantes são estimadas. Requer uma análise de sensibilidade, sobre o que falaremos posteriormente.

59
Programação Linear Terminologia
Solução No campo de Programação Linear é qualquer especificação de valores para as variáveis de decisão, não importando se esta especificação se trata de uma escolha desejável ou permissível.

60
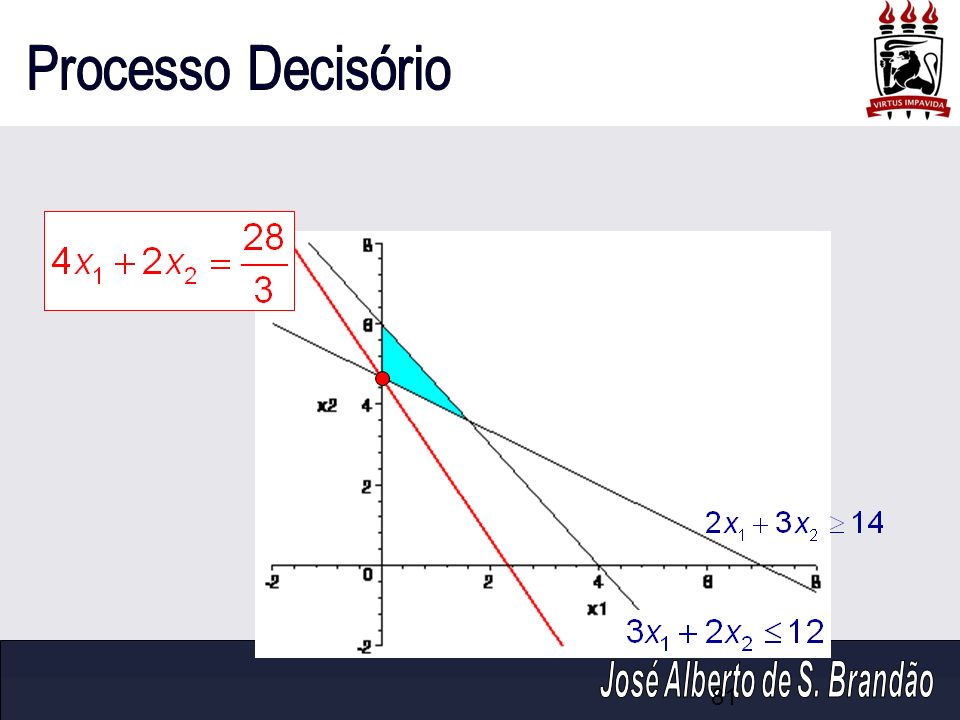
Exemplo de Solução x1 = 2 ; x2 = 2 x1 = 3 ; x2 = 4

61
Classificação das Soluções
Solução Viável É uma solução em que todas as restrições são satisfeitas; Solução Inviável É uma solução em que alguma das restrições ou as condições de não-negatividade não são atendidas;

62
Exemplos de Solução Viável e Inviável
x1 = 2 ; x2 = 2 ; S = (2, 2) Solução Viável Todas as restrições não são violadas x1 = 3 ; x2 = 4 ; S = (3, 4) Solução Inviável Pelo menos uma das restrições é violada
 Solução Viável. Todas as restrições não são violadas. x1 = 3 ; x2 = 4 ; S = (3, 4) Solução Inviável. Pelo menos uma das restrições é violada.")
63
Valor da Função-Objetiva
É especialmente importante verificar como fica o valor da função-objetivo (Z) nas soluções viáveis que podemos determinar:
 nas soluções viáveis que podemos determinar:")
64
A Solução Ótima A Solução Ótima é uma solução viável especial.
Dentre todas as soluções viáveis, aquela(s) que produzir(em) o valor da função-objetivo otimizado é chamada de ótima; A grande questão é como determinar a solução ótima.
 que produzir(em) o valor da função-objetivo otimizado é chamada de ótima; A grande questão é como determinar a solução ótima.")
65
Programação Linear Solução Gráfica
Quando o problema envolve apenas duas variáveis de decisão, a solução ótima de um problema de programação linear pode ser encontrada graficamente.

66
Programação Linear Solução Gráfica

67
Programação Linear Solução Gráfica
x1+x2£7 x1+x2=7 reta limite x1+x2£7 região abaixo da reta limite

68
Programação Linear Solução Gráfica
(5 ; 2), z=24
, z=24.")
69
Programação Linear Solução Gráfica - Exercício
Considere o seguinte o problema de LP Encontre a solução ótima. Solução Solução Ótima (3;1,5)
")
70
Programação Linear Solução Gráfica - Exercício
(4;0)
")
71
Programação Linear Restrições Redundantes
Uma restrição é dita redundante quando a sua exclusão do conjunto de restrições de um problema não altera o conjunto de soluções viáveis deste. É uma restrição que não participa como uma aresta do conjunto de soluções viáveis. Existe um outro problema sem essa restrição com a mesma solução ótima e o mesmo conjunto de soluções viáveis.

72
Programação Linear Restrições Redundantes
Resolva o seguinte problema

73
(5;2) Redundante
 Redundante")
74
O Problema do Artesão Um artesão faz colares e brincos para vender num bazar que acontece todos os dias. Ele os vende por R$10,00 e R$5,00, respectivamente. Ele nunca conseguiu vender mais de 10 colares e 8 brincos por dia. Um colar é feito em 20 minutos enquanto um anel é feito em 40 minutos. O artesão trabalha 4 horas por dia antes de ir para o bazar. Quantos colares e quantos brincos ele deve produzir para maximizar a sua receita diária? Professor deixe o slide na tela e vá para o quadro e tente resolver o problema junto com os alunos desenvolvendo a forma que devemos utilizar para resolver o problema. Mostre a importância de descobrir o que está na mão do administrador decidir (variáveis de decisão) Depois pergunte pelo objetivo que o administrador deve ter. e por fim as restrições.
 Depois pergunte pelo objetivo que o administrador deve ter. e por fim as restrições.")
75
O Problema do Artesão Quem deve tomar a decisão?
O que o decisor deve decidir? Com que objetivo ele deve tomar a decisão? Com que restrições a decisão será tomada? O artesão Quantos colares e brincos deve produzir por dia Maximizar sua receita Tempo para produção Demanda dos consumidores (colares/brincos)
")
76
A Decisão do Artesão Precisamos traduzir a decisão do Artesão em um modelo de programação linear para resolvê-lo; Chamemos de x1 e x2 as quantidades de colares e brincos que ele faz por dia, respectivamente. O Objetivo do Artesão é maximizar sua receita.

77
O Modelo para a Decisão do Artesão
Função-objetivo Maximizar a receita Restrições Demanda de Colares Demanda de Brincos Tempo Padrão Não Negatividade Prezado Professor Incentive aos alunos a responder antes de apresentar cada uma das respostas e resolva o problema no quadro antes de apresentar o próximo slide. 77

78
(10;1) Restrição Redundante
Observação: Uma observação sobre o gráfico? (10;1)
")
79
Problemas de Minimização
O processo de resolução gráfica de um problema de minimização é análogo ao de maximização, isto é: Utiliza as restrições para determinar o conjunto de soluções viáveis. Utiliza a função-objetivo para determinar a solução ótima. A diferença é que a solução ótima levará a função-objetivo ao menor valor possível.

80
Minimização Solução Gráfica
Encontre a solução ótima de: Prezado Professor Antes de mostrar o próximo slide resolva o problema no quadro

82
Soluções Múltiplas Até agora todos os problemas apresentaram apenas uma única solução ótima, isto é, apenas uma solução viável levava a função-objetivo ao seu valor ótimo. Existem problemas em que uma ou mais soluções viáveis nos levam ao mesmo valor ótimo, isto é, existem soluções múltiplas.

83
O Problema do Artesão Modificado
Um artesão faz colares e brincos para vender num bazar que acontece todos os dias. Ele os vende por R$10,00 e R$5,00, respectivamente. Ele nunca conseguiu vender mais de 10 colares e 8 brincos por dia. Um colar é feito em 20 minutos enquanto um anel é feito em 40 minutos. O artesão trabalha 4 horas por dia antes de ir para o bazar. Quantos colares e quantos brincos ele deve produzir para atingir uma receita diária de R$ 50,00? Professor deixe o slide na tela e vá para o quadro e tente resolver o problema junto com os alunos desenvolvendo a forma que devemos utilizar para resolver o problema. Mostre a importância de descobrir o que está na mão do administrador decidir (variáveis de decisão) Depois pergunte pelo objetivo que o administrador deve ter. e por fim as restrições.
 Depois pergunte pelo objetivo que o administrador deve ter. e por fim as restrições.")
84
O Problema do Artesão Modificado
Quem deve tomar a decisão? O artesão O que o decisor deve decidir? Quantos colares e anéis deve produzir por dia Com que objetivo ele deve tomar a decisão? Atingir a receita mínima Com que restrições a decisão será tomada? Tempo para produção Demanda dos consumidores (colares e brincos) Receita mínima
 Receita mínima.")
85
A Decisão do Artesão Modificado
Precisamos traduzir a decisão do Artesão em um modelo de programação linear para resolvê-lo; Chamemos de x1 e x2 as quantidades de colares e brincos que ele faz por dia, respectivamente. O Objetivo do Artesão é atingir a receita mínima.

86
O Modelo para a Decisão do Artesão Modificado
Função-objetivo Minimizar a receita Restrições Demanda de Colares Demanda de Brincos Tempo Padrão Receita Mínima Não Negatividade 86

87
Soluções Múltiplas Observação: Uma observação sobre o gráfico?

88
Soluções Ilimitadas Um problema de programação linear apresenta soluções ilimitadas quando uma das variáveis não tem nenhuma restrição de crescimento ou decrescimento e este fato causa que a função-objetivo não tenha valor ótimo que possa ser identificado.

89
Programação Linear Solução Ilimitada
Encontre a solução ótima:

90
Cresce indefinidamente Cresce indefinidamente x2 x2
14 14 12 12 10 10 8 8 6 6 4 4 2 2 x1 x1 -2 -2 2 2 4 4 6 6 8 8 10 10 -2 -2

91
Programação Linear Solução Inviável
Um problema de programação linear é dito inviável quando o conjunto de soluções viáveis é vazio. Considere o problema

92
Programação Linear Solução Gráfica - Exercício

93
Programação Linear e Convexidade
Conjunto Convexo em R2 Para quaisquer dois pontos do conjunto, todos os pontos que formam o segmento de reta que os unem fazem parte do conjunto. Conjunto Convexo Conjunto não Convexo

94
Método Simplex Teoremas Fundamentais
Teorema I O conjunto de todas as soluções viáveis de um modelo de Programação Linear formam um conjunto convexo. Teorema II Toda solução compatível básica, do sistema de equações lineares de um modelo de Programação linear, é um ponto extremo do conjunto de soluções viáveis, isto é, do conjunto de convexo de soluções.

95
Método Simplex Teoremas Fundamentais
21=5x1+2x2 x2 D E (1,4) C (0,4) (3,3) Solução Viável A B (0,0) (3,0) x1
 C. (0,4) (3,3) Solução. Viável. A. B. (0,0) (3,0) x1.")
96
Método Simplex Teoremas Fundamentais
Nos pontos extremos temos os seguintes valores para Z 21=5x1+2x2 z x2 D E 21 (1,4) C (0,4) 15 (3,3) 13 Solução Viável 8 pontos extremos A B (0,0) (3,0) x1 A B C D E
 C. (0,4) 15. (3,3) 13. Solução. Viável. 8. pontos. extremos. A. B. (0,0) (3,0) x1. A. B. C. D. E.")
97
Método Simplex Teoremas Fundamentais
Teorema III Se a função-objetivo possui um ótimo finito, então pelo menos uma solução ótima é um ponto extremo do conjunto convexo de soluções viáveis. Teorema IV Se a função-objetivo assume o ótimo em mais de um ponto extremo do conjunto de soluções viáveis, então ela toma o mesmo valor para qualquer ponto do segmento da reta que une esses pontos extremos.

98
Verificação Geométrica do Teorema III
O valor da função-objetivo varia quando esta se desloca. Logo, o valor ótimo (mínimo ou máximo) será obtido deslocando-se o máximo ou o mínimo a função-objetivo. x2 D E (1,4) (0,4) (3,3) C = máximo Solução Viável Mínimo =A x1 B (0,0) (3,0)
 será obtido deslocando-se o máximo ou o mínimo a função-objetivo. x2. D. E. (1,4) (0,4) (3,3) C = máximo. Solução. Viável. Mínimo =A. x1. B. (0,0) (3,0)")
99
Verificação Geométrica do Teorema IV
Entretanto, a função-objetivo pode assumir uma inclinação tal que no ponto ótimo ela coincida com a inclinação de alguma restrição. Soluções Múltiplas x2 x2 D E (1,4) C (0,4) (3,3) Em todos os pontos do segmento de reta CD, o valor da função-objetivo é o mesmo Solução Viável A B (0,0) x1 (3,0)
 C. (0,4) (3,3) Em todos os pontos do segmento de reta CD, o valor da função-objetivo é o mesmo. Solução. Viável. A. B. (0,0) x1. (3,0)")
100
Método Simplex Teoremas Fundamentais
Considere a solução gráfica do problema z x2 D E (1,4) C (0,4) (3,3) Solução Viável pontos extremos A B (0,0) (3,0) x1 A B C D E
 C. (0,4) (3,3) Solução. Viável. pontos. extremos. A. B. (0,0) (3,0) x1. A. B. C. D. E.")
101
PERT / CPM (Tempo) O PERT / CPM é uma ferramenta de valiosa colaboração quando da elaboração de um planejamento e de seu respectivo controle, objetivando atingir uma determinada meta.

102
PERT / COM Origem O CPM – Critical Path Method, foi elaborado entre 1956 e 1958 pela Dupont Company, que desenvolvia projetos de produtos químicos. Para cumprirem os seus objetivos deveriam executar os projetos com o máximo de precisão em relação ao fator tempo. O PERT – Program (Project) Evaluation and Review Technique, foi elaborado por volta de 1957 por uma equipe de Projetos Especiais da Marinha dos EUA quando necessitava desenvolver um projeto muito complexo, construir um foguete, o qual requeria um sólido planejamento e um rígido controle, considerando a grandeza dos projeto. O projeto contava com 200 empreiteiras, 9000 subempreiteiras e deveriam ser construídas em torno de peças. Com a aplicação da técnica, foi possível reduzir de 5 para apenas 3 anos o tempo para execução do projeto do submarino atômico que conduziria o míssil “Polaris”.
 Evaluation and Review Technique, foi elaborado por volta de 1957 por uma equipe de Projetos Especiais da Marinha dos EUA quando necessitava desenvolver um projeto muito complexo, construir um foguete, o qual requeria um sólido planejamento e um rígido controle, considerando a grandeza dos projeto. O projeto contava com 200 empreiteiras, 9000 subempreiteiras e deveriam ser construídas em torno de peças. Com a aplicação da técnica, foi possível reduzir de 5 para apenas 3 anos o tempo para execução do projeto do submarino atômico que conduziria o míssil Polaris .")
103
PERT / CPM Campo de Aplicação
O PERT / CPM, pode ser aplicado em tudo que se possa imaginar que tenha uma origem e um término previamente fixado. Desde a fabricação de um alfinete até a elaboração de um projeto para colocar um satélite em órbita.

104
PERT / CPM Diferenças Básicas
O PERT trabalha com três estimativas de tempo: Tempo otimista – condições favoráveis. Tempo mais provável – tempo mais próximo da realidade. Tempo pessimista – condições desfavoráveis. Por este motivo o PERT possui características probabilísticas e variáveis aleatórias. Portanto para calcular o tempo de cada atividade é necessário usar a formula abaixo. O CPM possui características determinísticas e variáveis reais.

105
PERT / CPM Conceitos Básicos
Atividade: representa uma parcela do trabalho total necessário para a execução de um projeto. Consome tempo e recursos (humanos, financeiros, tecnológicos e materiais). Evento: é a caracterização no tempo da origem ou do término de uma atividade, não consome tempo e nem recursos.
. Evento: é a caracterização no tempo da origem ou do término de uma atividade, não consome tempo e nem recursos.")
106
PERT / CPM Conceitos Básicos
Atividade fantasma: não consome tempo e nem recursos, mas só deve ser utilizada quando for realmente necessária. Casos que deve ser utilizada: Evitar que entre dois eventos sucessivos exista mais do que uma atividade. Demonstrar a independência de uma atividade. Professor: Maiores informações / exemplo, ver livro pág. 226 e 227

107
PERT / CPM Conceitos Básicos
Atividades condicionantes: são aquelas que condicionam a realização das atividades que lhes sucedem. Atividades paralelas: são duas ou mais atividades ocorridas entre dois eventos sucessivos. Atividades simultâneas: são duas ou mais atividades que partem de um único evento e se direcionam para eventos diferentes.

108
Roteiro Básico para aplicar a técnica PERT / CPM
1. Levantar todas as atividades necessárias para a realização do projeto. 2. Elaborar o Quadro de Prioridades – QP, o qual consiste em demonstrar a interdependência das atividades, ou seja, ordem de relacionamento (atividades que antecedem sucedem umas a outras).
.")
109
Roteiro Básico para aplicar a técnica PERT / CPM
3. Com base no QP, montar o Diagrama ou a Rede, que é a representação gráfica do projeto.

110
Roteiro Básico para aplicar a técnica PERT / CPM
Passos necessários para montar a rede: Por meio do QP verificar quais atividades partem do evento inicial; Ignorar as atividades antecessoras e montar a rede observando o destino de cada atividade, segundo o QP na ordem seqüencial em que são empregadas (de cima para baixo); Numerar os eventos, no início o número 1 e ao final o maior número de acordo com o projeto; Verificar se a Rede foi montada corretamente, “perguntando” ao QP de cima para baixo, qual a origem de cada atividade e observar a sua concordância com a Rede.
; Numerar os eventos, no início o número 1 e ao final o maior número de acordo com o projeto; Verificar se a Rede foi montada corretamente, perguntando ao QP de cima para baixo, qual a origem de cada atividade e observar a sua concordância com a Rede.")
111
Roteiro Básico para aplicar a técnica PERT / CPM
4. Calcular as datas mais cedo e mais tarde # Data mais cedo – é o momento no qual é possível ter concluídas todas as atividades que condicionam um evento. 2 (4) 4 C = Data mais cedo Dcant = Data mais cedo anterior Dativ = Duração da atividade (t >) = Maior tempo 3 C = Dcant + Dativ (t >)
 4. C = Data mais cedo. Dcant = Data mais cedo anterior. Dativ = Duração da atividade. (t >) = Maior tempo. 3. C = Dcant + Dativ (t >)")
112
Roteiro Básico para aplicar a técnica PERT / CPM
Cálculo do cedo: Ao evento inicial atribuir o valor 0 (zero), caso não seja determinado; Empregar a fórmula de cálculo do cedo - C = Dcant + Dativ (t >) , para cada evento (a partir do evento inicial). Se em determinado evento chegar mais do que uma atividade (evento 9), escolher aquela de (maior tempo). Professor: Maiores informações: livro pág. 230
, caso não seja determinado; Empregar a fórmula de cálculo do cedo - C = Dcant + Dativ (t >) , para cada evento (a partir do evento inicial). Se em determinado evento chegar mais do que uma atividade (evento 9), escolher aquela de (maior tempo). Professor: Maiores informações: livro pág")
113
Roteiro Básico para aplicar a técnica PERT / CPM
4. Calcular as datas mais cedo e mais tarde # Data mais tarde – é o último momento permissível para as atividades chegarem a um determinado evento sem atrasar o início das atividades que lhes sucedem. 3 A – deve iniciar-se no 3º dia B – deve iniciar-se no 5º dia A B T = Data mais tarde Dtpost = Data mais cedo anterior Dativ = Duração da atividade (t <) = Menor tempo T = Dtpost - Dativ (t<)
 = Menor tempo. T = Dtpost - Dativ (t<)")
114
Roteiro Básico para aplicar a técnica PERT / CPM
Cálculo do tarde (exatamente igual ao do cedo, mas no sentido inverso): Ao evento final atribuir o mesmo valor da data mais cedo final (quando não determinado); Empregar a fórmula de cálculo do tarde T = Dtpost - Dativ (t<), para cada evento (a partir do evento final); Se de determinado evento partir mais do que uma atividade (evento 1), compare as atividades que dele saíram (A, B e C) e escolha a de menor valor.
: Ao evento final atribuir o mesmo valor da data mais cedo final (quando não determinado); Empregar a fórmula de cálculo do tarde T = Dtpost - Dativ (t<), para cada evento (a partir do evento final); Se de determinado evento partir mais do que uma atividade (evento 1), compare as atividades que dele saíram (A, B e C) e escolha a de menor valor.")
115
Roteiro Básico para aplicar a técnica PERT / CPM
5. Calcular o Tempo Disponível - TD O TD deve ser calculado com o objetivo de verificar a disponibilidade de tempo de cada atividade para poder fazer os ajustes necessários de forma a não atrasar o prazo fixado para o término do projeto.

116
Roteiro Básico para aplicar a técnica PERT / CPM
6. Calcular as Folgas das Atividades As folgas são estabelecidas com o objetivo de verificar a diferença entre as possíveis datas de início (cedo inicial e tarde inicial) e suas possíveis datas de término (cedo final e tarde final). Primeira data de início Última data de término Primeira data de término Última data de início 5 18 (3) (14) A 1 2 10
 e suas possíveis datas de término (cedo final e tarde final). Primeira data de início Última data de término Primeira data de término Última data de início (3) (14) A")
117
Roteiro Básico para aplicar a técnica PERT / CPM
.

118
Roteiro Básico para aplicar a técnica PERT / CPM
Cálculo das Folgas: ⇨ FL (Folga Livre) é o atraso máximo que uma atividade pode ter sem comprometer a data mais cedo do seu evento final. FL = (Dcf - Dci) – D ⇨ FT (Folga Total) é o Tempo Disponível menos a duração da atividade. FT = TD – D ou FT = (Dtf - Dci) – D ⇨ FD (Folga Dependente) é o prazo que se disponível entre o tarde do evento final e o tarde do evento inicial para realizar uma atividade. FD = (Dtf - Dti) – D ⇨ FI (Folga Independente) é o prazo disponível entre o cedo final e o tarde inicial para realizar uma atividade (eventualmente dá um número negativo). FI = (Dcf - Dti) - D
 é o atraso máximo que uma atividade pode ter sem comprometer a data mais cedo do seu evento final. FL = (Dcf - Dci) – D. ⇨ FT (Folga Total) é o Tempo Disponível menos a duração da atividade. FT = TD – D ou FT = (Dtf - Dci) – D. ⇨ FD (Folga Dependente) é o prazo que se disponível entre o tarde do evento final e o tarde do evento inicial para realizar uma atividade. FD = (Dtf - Dti) – D. ⇨ FI (Folga Independente) é o prazo disponível entre o cedo final e o tarde inicial para realizar uma atividade (eventualmente dá um número negativo). FI = (Dcf - Dti) - D.")
119
Roteiro Básico para aplicar a técnica PERT / CPM
Exemplo do cálculo das folgas e do tempo disponível: 5 18 (3) (14) A 1 2 10
 (14) A")
120
Roteiro Básico para aplicar a técnica PERT / CPM
7. Determinação do Caminho Crítico O Caminho Crítico é formado pelas atividades mais relevantes do projeto para fins de controle, pois elas não podem sofrer qualquer tipo de atraso, e se isto acontecer irá refletir diretamente no prazo fixado para o término do projeto. O Caminho Crítico é constituído pelas atividades (interligadas) de menor folga ou de folga nula, entre o evento inicial e o evento final, o qual, inclusive, podem passar pelas atividades fantasmas.
 de menor folga ou de folga nula, entre o evento inicial e o evento final, o qual, inclusive, podem passar pelas atividades fantasmas.")
121
Roteiro Básico para aplicar a técnica PERT / CPM
Métodos para estabelecer o Caminho Crítico: 1º Pelas diferenças constantes entre os cedos e os tardes (encontrada no último evento). Regras Básicas: a) não são críticas as atividades cuja diferença entre cedos e tardes não seja igual àquela encontrada no último evento; b) poderão ser críticas aquelas atividades cuja diferença no evento inicial e final entre cedos e tardes seja igual à encontrada no último evento; c) são, realmente, atividades críticas aquelas que obedecem à condição anterior e que a data mais tarde de seu evento final, menos a sua própria duração, é exatamente igual à data mais tarde de seu evento inicial, ou seja: Tarde Posterior – Duração da Atividade = Tarde Anterior Professor: observar a pág. 235 do livro para facilitar a explicação do exemplo a seguir (slide 46)
. Regras Básicas: a) não são críticas as atividades cuja diferença entre cedos e tardes não seja igual àquela encontrada no último evento; b) poderão ser críticas aquelas atividades cuja diferença no evento inicial e final entre cedos e tardes seja igual à encontrada no último evento; c) são, realmente, atividades críticas aquelas que obedecem à condição anterior e que a data mais tarde de seu evento final, menos a sua própria duração, é exatamente igual à data mais tarde de seu evento inicial, ou seja: Tarde Posterior – Duração da Atividade = Tarde Anterior. Professor: observar a pág. 235 do livro para facilitar a explicação do exemplo a seguir (slide 46)")
122
Roteiro Básico para aplicar a técnica PERT / CPM
Determinação do Caminho Crítico (exemplo):
:")
123
Roteiro Básico para aplicar a técnica PERT / CPM
Métodos para estabelecer o Caminho Crítico: 2º Pelas Folgas da Atividades, onde as folgas (livrem total, dependente e independente) devem ser iguais a 0 (zero).
 devem ser iguais a 0 (zero).")
124
Duração da tarefa -(Dias)
Provão Questão 27 Uma empresa de consultoria pretende reorganizar uma indústria de maneira a diminuir o tempo de fabricação de um dos seus produtos, ou seja, cadeira de espaldar alto. Como vai utilizar a técnica de PERT/CPM, fez um levantamento de todas as tarefas necessárias para a produção da cadeira. Este levantamento é apresentado na tabela e gráfico seguintes: Atividade Atividades antecessoras imediatas Duração da tarefa -(Dias) A - Compra e entrega de matéria-prima - . - 2 B - Corte e preparação da madeira A 1 C - Preparação da estrutura metálica da base 3 D - Acabamento da madeira B 4 E - Pintura da base C F - Controle de qualidade da madeira D 5 G - Controle de qualidade da base metálica E H - Montagem e embalagem F e G
 A - Compra e entrega de matéria-prima B - Corte e preparação da madeira. A. 1. C - Preparação da estrutura metálica da base. 3. D - Acabamento da madeira. B. 4. E - Pintura da base. C. F - Controle de qualidade da madeira. D. 5. G - Controle de qualidade da base metálica. E. H - Montagem e embalagem. F e G.")
125
Provão Questão 27 O caminho crítico e o tempo de duração da montagem, respectivamente, são: (A) A - B - C - E - G - H ; 16 dias. (B) A - B - C - E - G - H ; 17 dias. (C) A - B - C - F - G - H ; 16 dias. (D) A - B - D - F - H ; 17 dias. (E) A - C - E - G - H ; 16 dias.
 A - B - C - E - G - H ; 16 dias. (B) A - B - C - E - G - H ; 17 dias. (C) A - B - C - F - G - H ; 16 dias. (D) A - B - D - F - H ; 17 dias. (E) A - C - E - G - H ; 16 dias.")
126
Provão 2000 - Questão 27 Resposta: (D)
Caminho A-B-D-F-H = =17 Caminho A-C-E-G-H= =16 O caminho crítico será o maior deles.

Apresentações semelhantes

 – Lápides 1, 2, 3» «nomes gravados, 21 de Agosto de 2008» «Ultramar.TerraWeb»>")








;>")








