Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Segmentação de imagens segmentação Pré-processamento descrição / análise Não existe uma única e definitiva abordagem ao problema da segmentação A descrição pode ser feita a partir de diferentes partes da cena Pode haver várias formas de se extrair as regiões de interesse a serem descritas/analisadas Conclusão: a segmentação é uma etapa dependente do problema, importante na análise de imagens

2
Classificação geral Completa: resulta num conjunto de regiões disjuntas Parcial: não corresponde diretamente a imagens de objetos Técnicas de segmentação: baseada em conhecimento global baseada no contorno dos objetos baseada nas regiões definida pelos objetos

3
Ou equivalentemente: baseada em descontinuidades (contornos) dos níveis de cinza baseada em similaridades (regiões) dos níveis de cinza Descontinuidades: detecção de pontos isolados, primitivas e contornos etc similaridade: limiarização, crescimento de regiões, subdivisão de regiões, fusão de regiões etc Tudo isto em imagens estáticas ou dinâmicas
 dos níveis de cinza baseada em similaridades (regiões) dos níveis de cinza Descontinuidades: detecção de pontos isolados, primitivas e contornos etc similaridade: limiarização, crescimento de regiões, subdivisão de regiões, fusão de regiões etc Tudo isto em imagens estáticas ou dinâmicas")
4
Detecção de descontinuidades Em geral, pode-se considerar máscaras representando modelos das descontinuidades Exemplo: Detecção de pontos isolados A resposta R da máscara para um ponto da imagem é:

5
Um ponto isolado é detectado se T é um limiar Exemplo de máscara R imagemmáscara

6
Original f máscara Exemplo: Detecção de ponto isolado R e limiar T = max(|R|)
")
7
Detecção de linhas Exemplo: Considerar máscaras representando modelos de linhas em possíveis direções na malha discreta horizontal +45 vertical -45 o ponto está associado a uma linha na direção i

8
Exemplo: Detecção de linhas de espessura 1 pixel na direção -45 graus Original -45 máscara Reposta da máscara (R)
")
9
espessura de 1 pixel

10
Reposta da máscara (R)|R|
|R|")
11
Resposta após limiarização com T = max(|R|)
")
12
Casamento de padrões (template matching) Outra forma simples de se extrair padrões de uma imagem é a partir do conceito de correlação visto anteriormente. Correlação de f(x,y) e h(x,y): equivalente à convolução sem a rotação da máscara h de Pode-se usar a FFT para o casamento com padrões muito grandes
 e h(x,y): equivalente à convolução sem a rotação da máscara h de Pode-se usar a FFT para o casamento com padrões muito grandes.")
13
Exemplo 1: f h c Pontos de c > T=60 (o max valor dos pixels em c é 68)
")
14
Exemplo 2: f h

15
c pontos de c > T=315

16
Detecção de bordas Uma borda é uma fronteira entre duas regiões com relativa diferença de níveis de cinza Estes métodos de segmentação são ideais quando as regiões são suficientemente homogêneas A ideia básica consiste do emprego de um operador derivativo local (como estudado anteriormente)
")
17
Os detectores de contorno vistos anteriormente (Roberts, Sobel, LoG, Prewitt, Canny etc) podem ser empregados aqui. O Laplaciano, por exemplo, é utilizado na localização das bordas considerando-se a propriedade do zero-crossing (Método de Marr-Hildreth). Lembrando: Este conceito baseia-se na convolução de uma imagem com o Laplaciano de uma função gaussiana (LoG) 2-D do tipo: O Laplaciano de h é dado por
. Lembrando: Este conceito baseia-se na convolução de uma imagem com o Laplaciano de uma função gaussiana (LoG) 2-D do tipo: O Laplaciano de h é dado por.")
18
O zero-crossing ocorre quando A forma desta função corresponde ao modelo das máscaras laplacianas do tipo

19
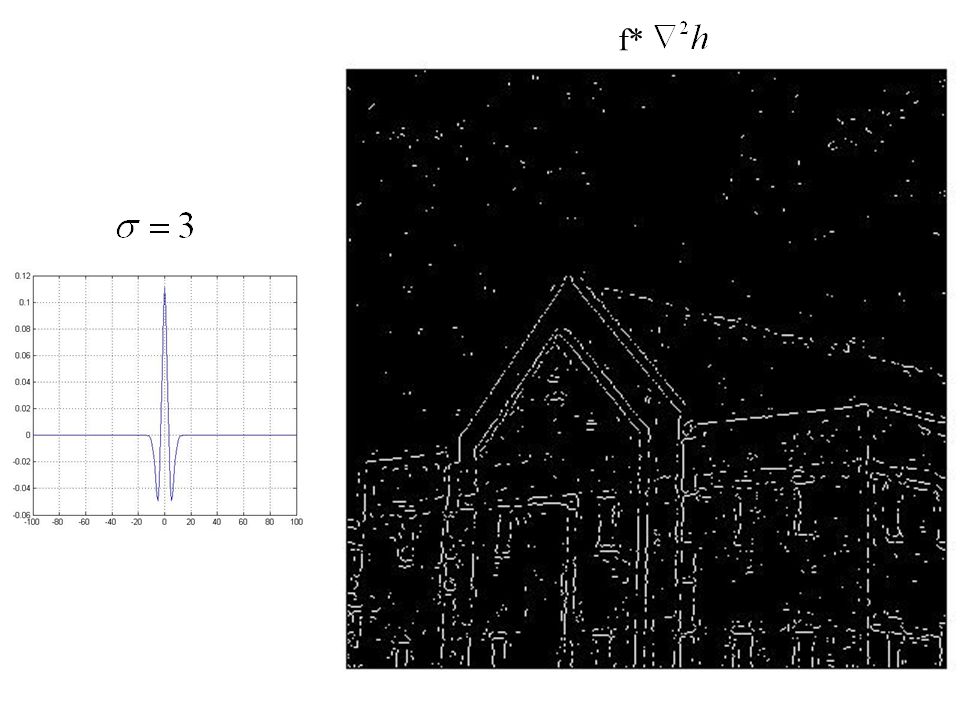
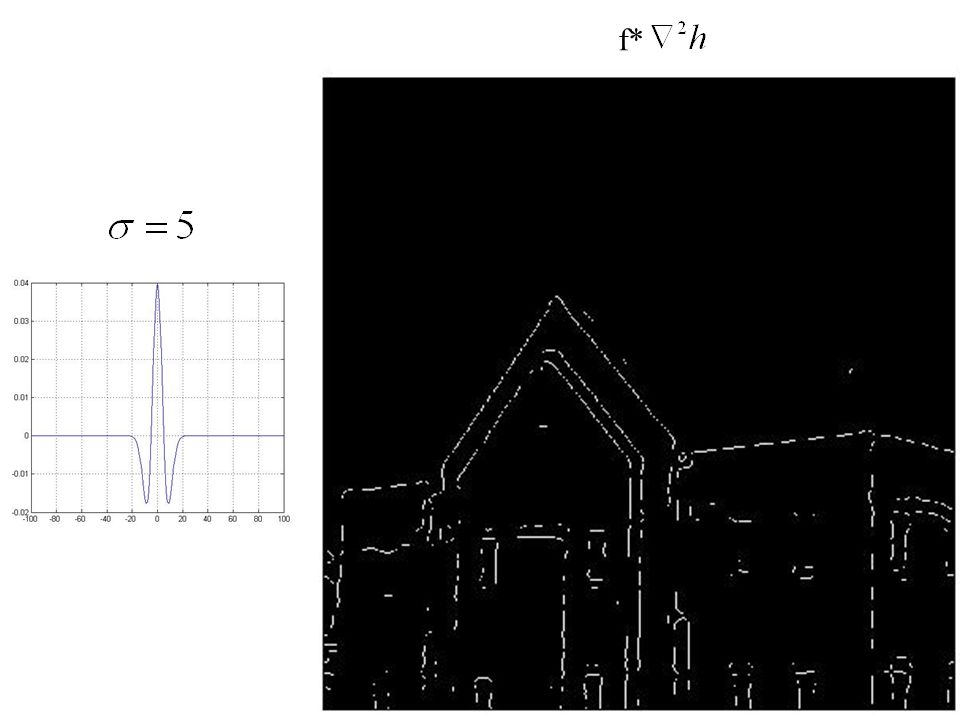
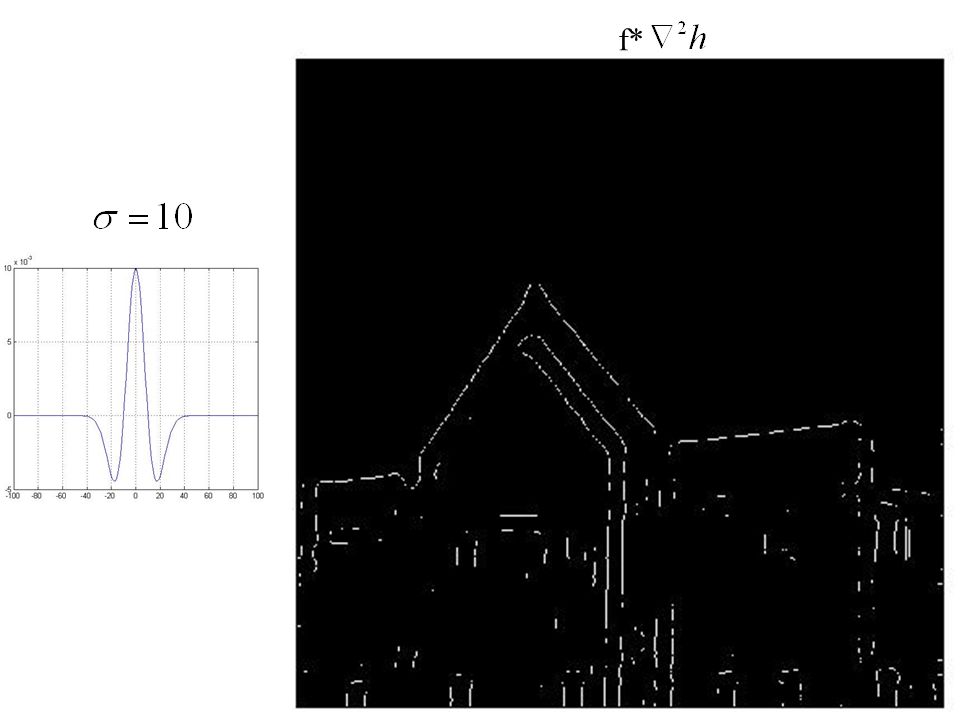
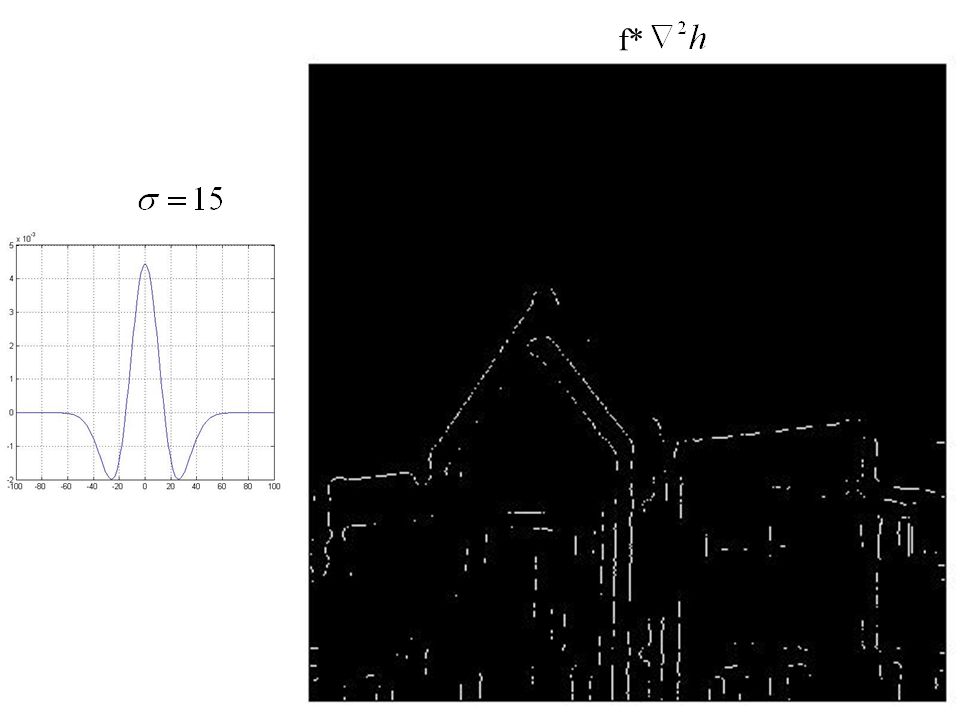
Filtragem passa-altas: Borra a imagem com o grau de borramento proporcional a Isto significa que este operador filtra a imagem e serve para detectar a posição dos seus contornos. filtragem + deteccão de bordas

20
Exemplos: LoG com diferentes sigmas Original f

21
f*

26
LoG Sobel Original Função gaussiana Máscara laplaciana LoG LoG limiarizado Zero-crossing

Apresentações semelhantes











>")



| f(x) X=10.>")
>")


