Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Eric Koji Nakirimoto Marcos Eduardo Braz Monn Professor Dr. Rodrigo Coral Metrologia e instrumentação Projeto Ultron

2
O Conceito Carro três rodas Medir distância Parar com obstáculos Voltar para uma base Sensores infravermelho

4
CRONOGR AMA 201 5 Calendário Anual ProjetoAtividadesBudgetJanFevMarAbrMaiJunJul Projeto 1 Concepção xx x x Hardware xxxx x x x x Software x x x x x x x Final x Entregas Parte 1 x Parte 2 x Parte 3 x

5
METAS 201 5 Montagem da estrutura com sensores Comunicação hardware e software Teste final Relatório final Arquivos Montagem de estrutura Testar componentes Testar hardware Testar software Plano B Teste ideias definidas Corrigir software Blindar erros

6
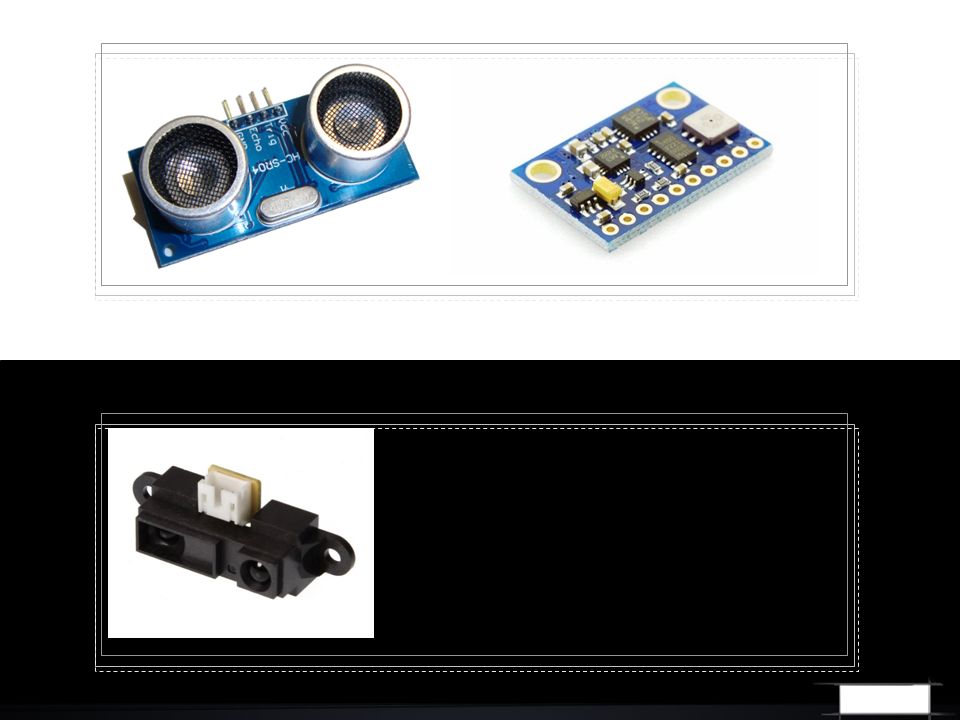
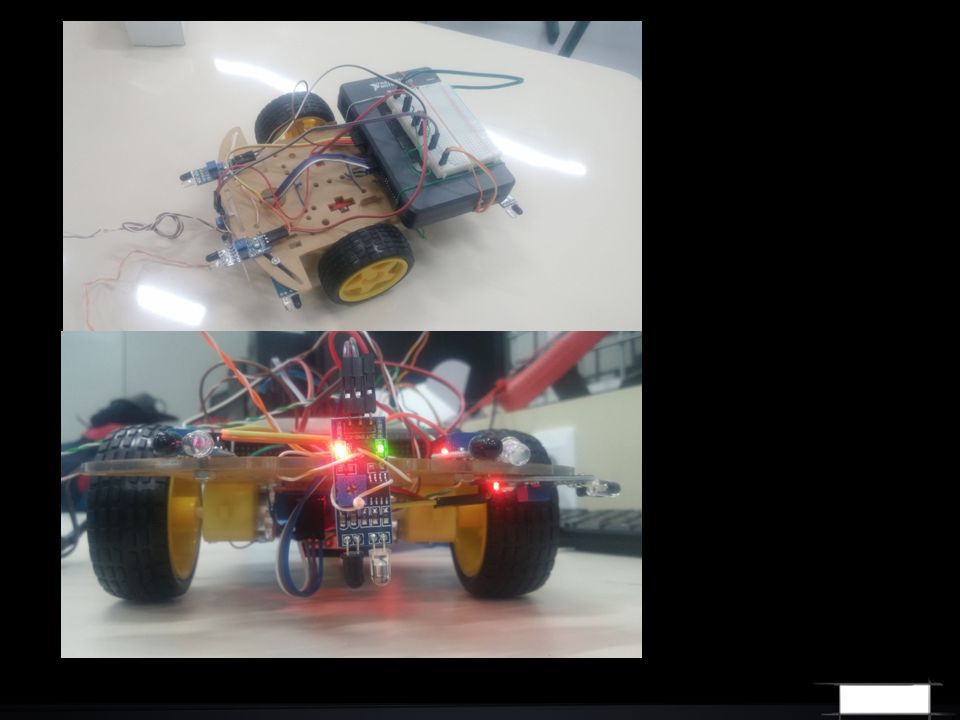
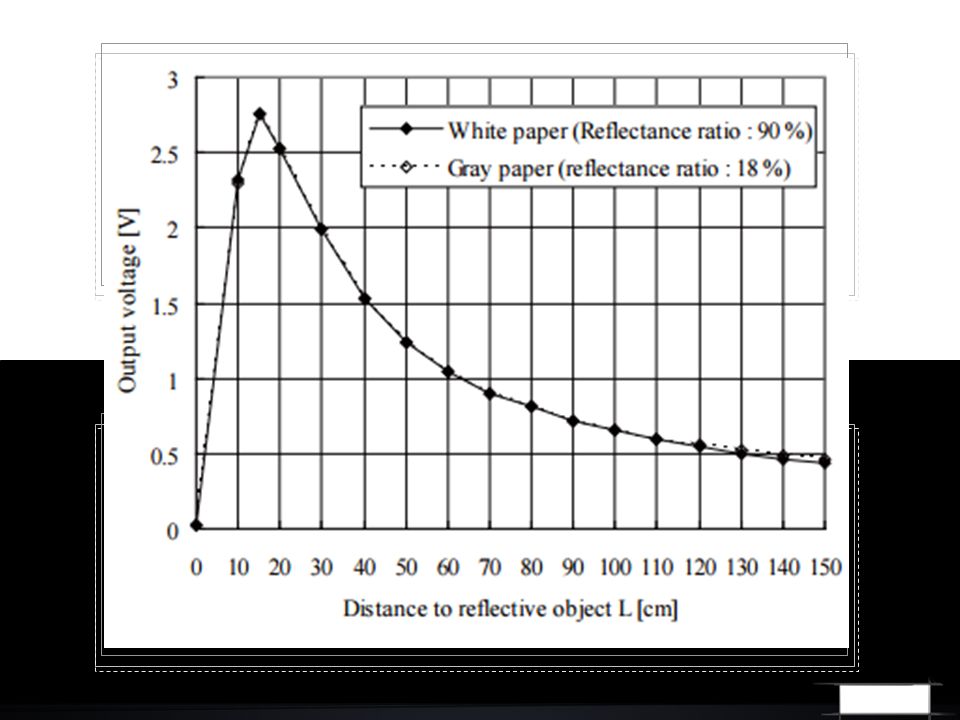
O Plano B Carro quatro rodas Medir distância sensor ultrassonico Bussola eletrônica Encoder interno Sensor infravermelho de distância

8
Video 1 Box para texto

9
Testes Sensor infravermelho Sensor ultrassonico Diferença entre eixos Torque de partida – bateria Magnetometro Acelerometro Preliminares

12
Magnetometro Sinal aleatório Variação nos dados Influencia eletromagnética Ultima chance 201 5

13
Definição Sensor magnetometro Carro 3 rodas NI MyRio Labview 2013 Sensor infravermelho para obstáculo Direção norte/sul/leste/oeste Final

14
Máximo X Norte/sul (x1;y1) Máximo Y Leste/oeste(x2;y 2) Correção automática Sensor infravermelho 201 5
 Máximo Y Leste/oeste(x2;y 2) Correção automática Sensor infravermelho 201 5")
15
Como Montagem estruturada Medição feita fora da sala Software robusto Loops paralelos Compensação Executar

16
Plano Montagem concluida Software robusto Robo norte, sul, leste e oeste. Correção inteligente Final

17
Box para texto

18
Video 2

Apresentações semelhantes