Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Prof. Dr. Mário Luiz Tronco
Elementos de automação: hardware e software – Prof. Dr. Mário Luiz Tronco

2
Automação Industrial No conceito de automação, existe uma autoadaptação a diferentes condições, de modo que as açoes do sistema conduzam a resultados ótimos Na prática: Recebe sinais dos instrumentos de medidas da fábrica, compara com os valores ideais e realiza operações matemáticas para gerar sinais de correção Os sinais de correção instruem os dispositivos de controle acerca da alteração mais apropriada para cada instante, com o intuito de conduzir a uma produção ótima, sob um determinado ponto de vista Computador (Controlador) Instrumentos de medida da fábrica Dispositivos de controle da fábrica
 Instrumentos de medida da fábrica. Dispositivos de controle da fábrica.")
3
Automação Industrial Integração de conhecimentos substituindo a observação, os esforços e decisões humanas por dispositivos (mecânicos, elétricos, eletrônicos, etc.) e softwares concebidos por meio de especificações funcionais e tecnológicas, com uso de metodologias. Envolve diversas áreas do conhecimento
 e softwares concebidos por meio de especificações funcionais e tecnológicas, com uso de metodologias. Envolve diversas áreas do conhecimento.")
4
Parte física dos sistemas
Impõem o comportamento desejado ao sistema Sistemas de Controle Eletrônica Computação Automação Processamento de sinais Controle Mecânica Modelagem, análise e simulação Algoritmos de controle Parte física dos sistemas

5
Automação

6
Pentágono da Automação
Modelagem de Sistemas Atuadores e Sensores Pentágono da Automação Sinais e Sistemas Software de Aquisição de dados Computadores, Redes de Comunicação e Sistemas Lógicos

13
Automação – Conceitos Básicos
Sistema Saídas Entradas Perturbações Sistema: Um arranjo complexo de elementos físicos* caracterizados por parâmetros mensuráveis**

14
Matéria Prima + Valor Agregado
Relacionada com a arquitetura física Automação – Conceitos Básicos Sistema Automatizado Matéria Prima Parte Operativa Matéria Prima + Valor Agregado Sensores Atuadores Ordens de comando Retorno de informações Relacionada com a arquitetura de software Permitem a interação entre as duas partes Parte Comando

15
Sistemas em Malha Aberta
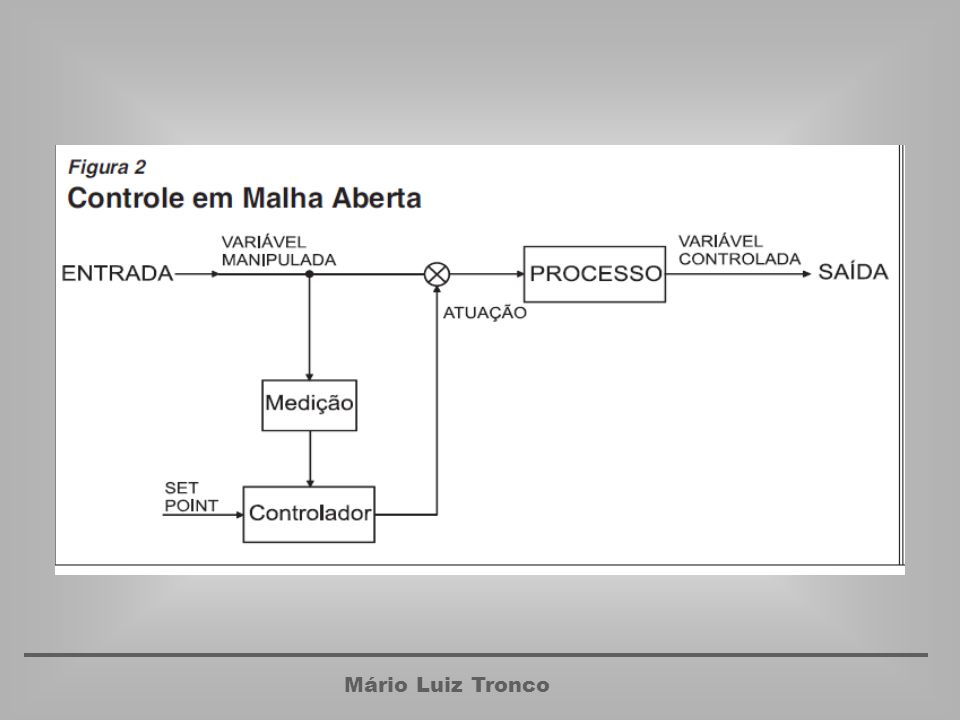
Os Sistemas em Malha Aberta são aqueles em que as grandezas de saída não são comparadas com as grandezas de entrada. Uma máquina de secar roupas, A velocidade de acionamento de um cilindro hidráulico,

16
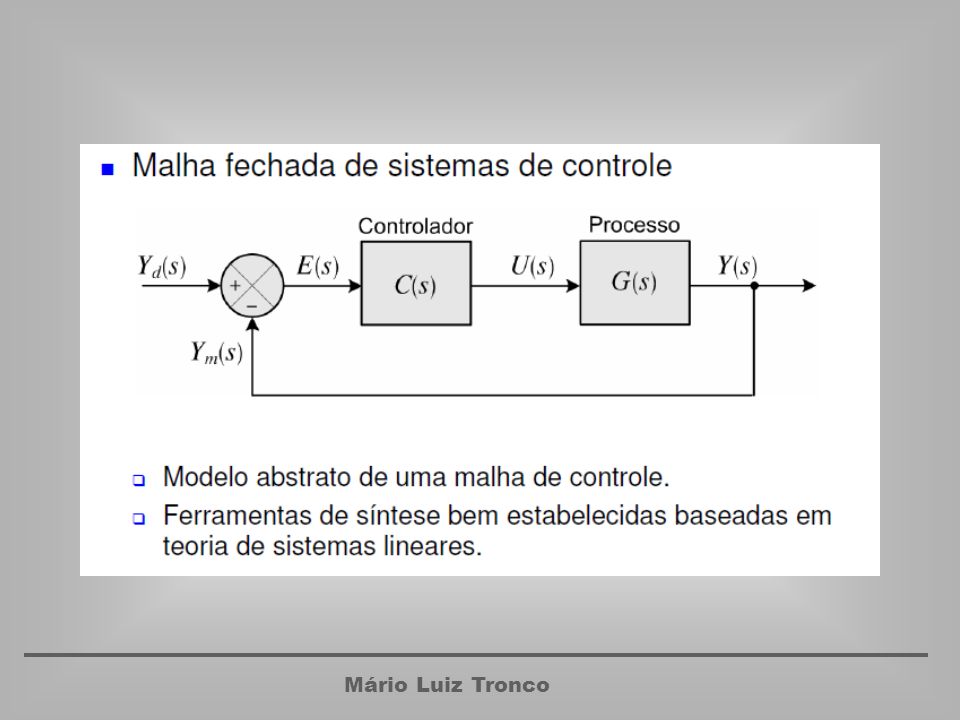
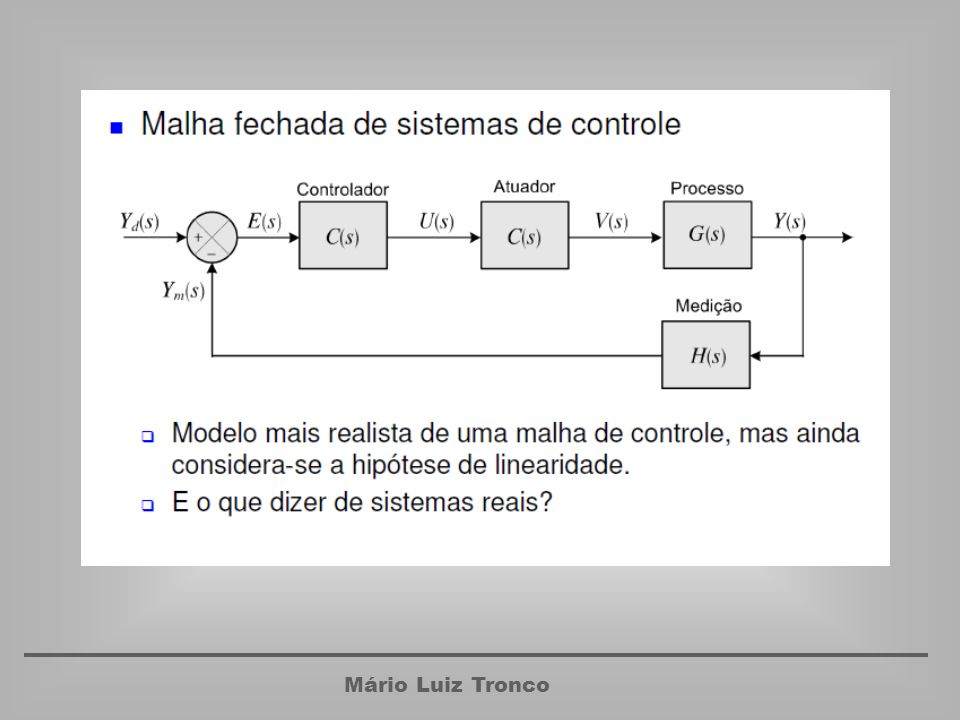
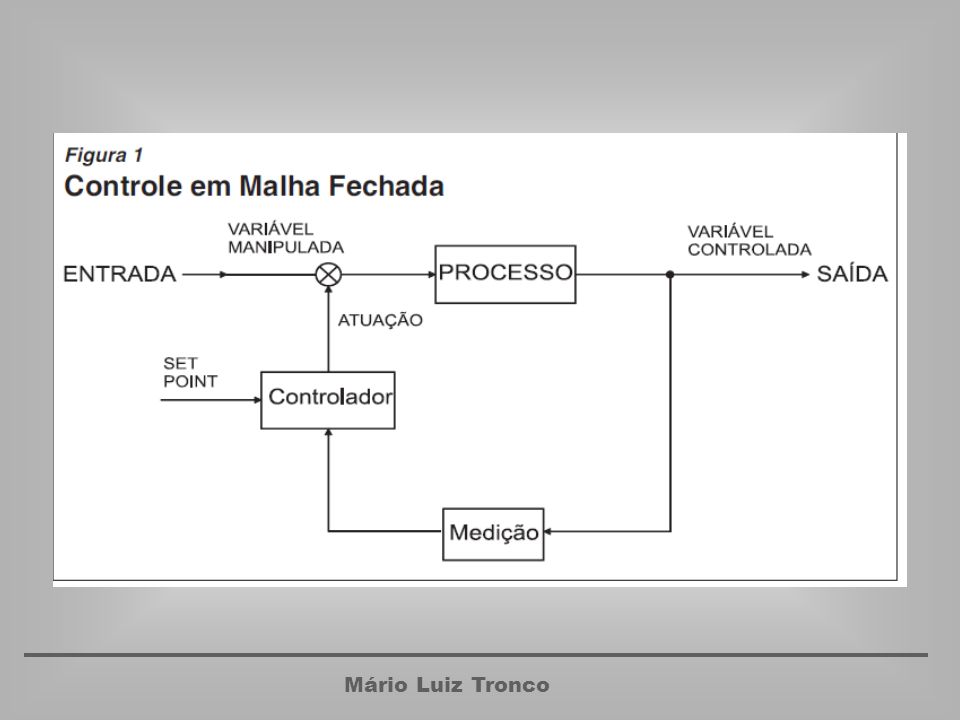
Sistemas em Malha Fechada
No Sistema em Malha Fechada, há um fluxo de informação no sentido direto, da entrada para a saída, e outro fluxo de informações que compara a saída com um valor de referência. A comparação é feita através da realimentação da saída. Os sistemas de malha fechada são controlados através de circuitos lógicos eletrônicos tornando-se mais rápidos, compactos e capazes de receber mais informações de entrada e atuando sobre um maior número de dispositivos de saída.

17
Fluxo de informação Vamos analisar no processo automático de furação uma cadeia de comando. Da entrada até saída do sistema há um fluxo de informação. A informação consiste em sinais de entrada que assumem diferentes características dentro do próprio sistema. Observe o diagrama que ilustra este fluxo, a seguir.

18
Entrada de sinais: a entrada de uma informação ou sinal no sistema é feita através de: interruptores de fim de curso; emissores/receptores de sinais sem contato (por exemplo, infravermelho); barreiras fotoelétricas; botões e pedais manuais; um programa de computador (que fornece os valores de referência, por exemplo).
; barreiras fotoelétricas; botões e pedais manuais; um programa de computador (que fornece os valores de referência, por exemplo).")
19
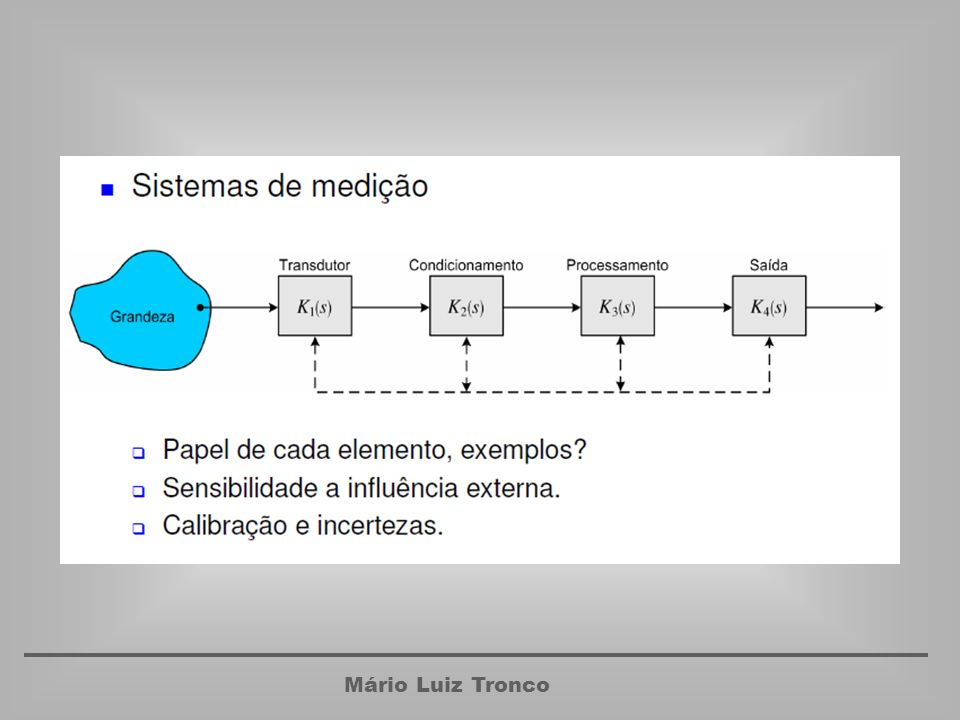
Processamento de sinais:
as informações da entrada são processadas pelos seguintes elementos: válvulas pneumáticas; módulos eletrônicos; microprocessadores; CLP´s.

20
Conversão de sinais: a conversão de sinais é feita pelos seguintes elementos: amplificadores; placas AD/DA (analógico-digital/digital- analógico); válvulas pneumáticas, hidráulicas e eletromagnéticas.

21
Saída: a saída das informações é feita pelos atuadores ou elementos de trabalho: válvulas e cilindros hidráulicos e pneumáticos; contadores de potência; transistores de potência.

27
SERVOMOTORES

28
CLP

29
IHM

30
Pneumática

31
Pneumática

32
Pneumática

33
Pneumática

34
Pneumática

35
Pneumática

36
Pneumática

37
Pneumática

38
Pneumática

39
Hidráulica

Apresentações semelhantes