Carregar apresentação
A apresentação está carregando. Por favor, espere

1
FUNDAMENTOS DE FILTRAGEM ESPACIAL
Filtragem espacial é uma das principais ferramentas usadas para um largo espectro de aplicações. O nome filtro é emprestado do processamento no domínio da frequência, como filtro de passa-baixa (lowpass). Filtragem espacial realiza operação diretamente na imagem, usando filtros espaciais também chamados de máscaras, kernels, templates, e windows. Se a operação realizada sobre os pixels é linear, o filtro é chamado de filtro espacial linear, caso contrário, é chamado filtro não-linear.
. Filtragem espacial realiza operação diretamente na imagem, usando filtros espaciais também chamados de máscaras, kernels, templates, e windows. Se a operação realizada sobre os pixels é linear, o filtro é chamado de filtro espacial linear, caso contrário, é chamado filtro não-linear.")
2
A mecânica de filtragem espacial
linear usando máscara de 3x3. A forma escolhida para denotar as coordenadas dos coeficientes da máscara de filtragem simplifica a escrita de expressões para filtragem linear.

3
A Fig. 3.28 ilustra a mecânica da filtragem linear espacial usando uma vizinhança 3x3.
Em qualquer ponto (x,y) a resposta g(x,y) da filtragem é a soma de produtos dos coeficientes e as intensidades dos pixels : Observa-se que o coeficiente central do filtro, w(0,0), alinha com o pixel na posição (x,y). Em geral uma filtragem linear espacial de uma imagem MxN com um filtro de tamanho mxn é dada por: onde x e y são variados tal que cada pixel em w visite todos os pixel em f.
 a resposta g(x,y) da filtragem é a soma de produtos dos coeficientes e as intensidades dos pixels : Observa-se que o coeficiente central do filtro, w(0,0), alinha com o pixel na posição (x,y). Em geral uma filtragem linear espacial de uma imagem MxN com um filtro de tamanho mxn é dada por: onde x e y são variados tal que cada pixel em w visite todos os pixel em f.")
5
CORRELAÇÃO E CONVOLUÇÃO ESPACIAIS
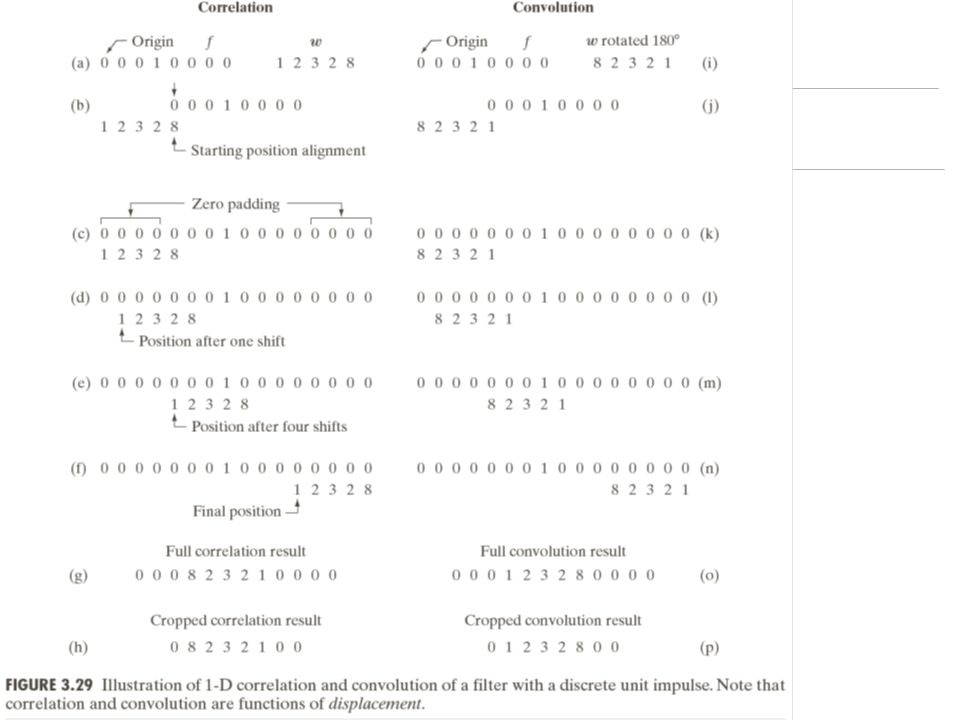
Correlação é o processo de mover uma máscara de filtro sobre uma imagem e computar a soma de produtos em cada posição, exatamente como explicado anteriormente. A convolução difere da convolução pela rotação do filtro de 180o. A fig ilustra a diferença entre essas duas operações para uma função 1D.

6
Ilustração de correlação e
convolução 1-D de um filtro com um impulso unitário discreto. Note que correlação e convolução são funções de deslocamento.

8
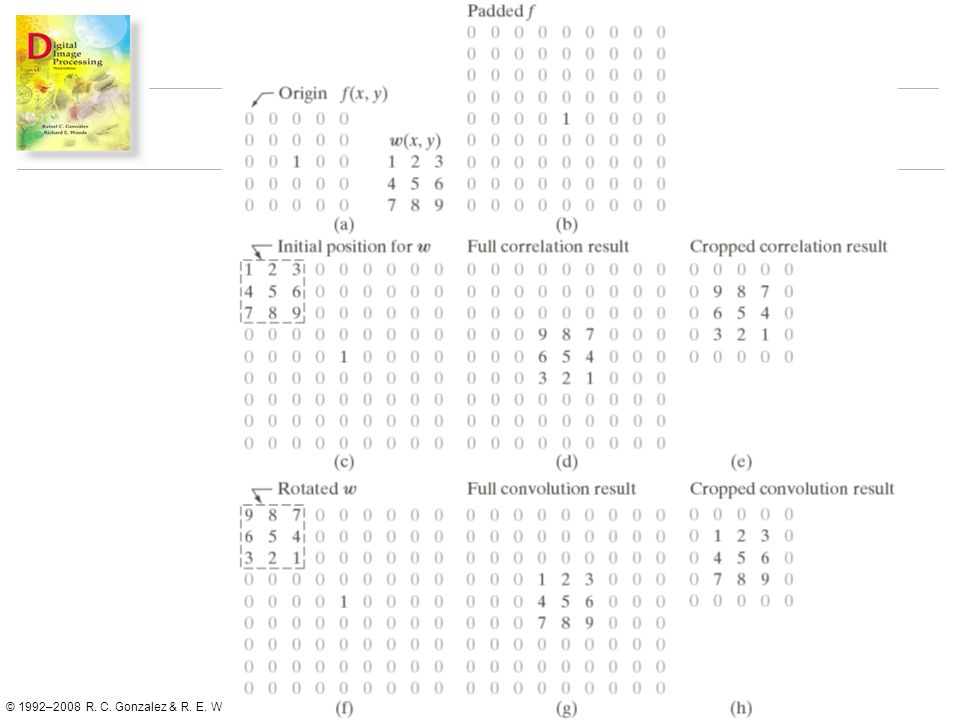
Correlação (linha do meio) e
convolução (última linha) de um filtro 2D com um impulso unitário discreto 2D. Os 0s são mostrados em cinza para facilitar a análise visual.
 de. um filtro 2D com um impulso. unitário discreto 2D. Os 0s são mostrados em cinza. para facilitar a análise visual.")
10
Observações: Usar operações de correlação ou convolução para a filtragem espacial é uma questão de preferência. O importante é escolher uma máscara com os coeficientes adequados para que o resultado esperado seja obtido. Para uma máscara com os valores de coeficientes simétricos os resultados da correlação e convolução coincidem (filtros isotrópicos, ou invariantes a rotação). Finalmente, é comum encontrar termos como filtro de convolução, máscara de convolução ou kernel de convolução na literatura de processamento de imagens, denotando um filtro espacial, sem necessariamente significar que o filtro seja usado para uma verdadeira convolução. A expressão “convolver uma máscara com uma imagem” é comumente usada para denotar um processo de correlação.
. Finalmente, é comum encontrar termos como filtro de convolução, máscara de convolução ou kernel de convolução na literatura de processamento de imagens, denotando um filtro espacial, sem necessariamente significar que o filtro seja usado para uma verdadeira convolução. A expressão convolver uma máscara com uma imagem é comumente usada para denotar um processo de correlação.")
11
REPRESENTAÇÃO VETORIAL
Quando o interesse está na resposta característica, R, de uma máscara, é conveniente escrever a soma de produtos como Para usar essa equação em correlação, usa-se a máscara normalmente. Para usar a mesma equação para convolução, rotacionamos a máscara de 180o .

12
Uma representação de uma
máscara de filtragem geral 3x3.

13
GERAÇÃO DE MÁSCARAS DE FILTRO ESPACIAL
A geração requer a especificação de mn coeficientes do filtro. Esses coeficientes são especificados levando em consideração que o papel do filtro é calcular a soma de produtos dos coeficientes com as intensidades de pixels. Por exemplo, supor que queiramos substituir os pixels de uma imagem pela intensidade média de uma vizinhança 3x3 centrada nesses pixels. O valor médio é a soma dos nove valores de intensidade dividido por 9, ou seja: Em outras aplicações, temos uma função contínua de duas variáveis, e o objetivo é obter uma máscara baseada nessa função. Por exemplo, a função Gaussiana de duas variáveis tem a forma onde s é o desvio padrão. Para gerar uma máscara 3x3 dessa função, fazemos a amostragem dessa função em torno do centro. Assim, w1=h(-1,-1), w2=h(-1,0),..., w9=h(1,1).
, w2=h(-1,0),..., w9=h(1,1).")
14
FILTROS ESPACIAIS DE SUAVIZAÇÃO
Os filtros de suavização são usados para borramento (blurring) e para redução de ruído. O borramento é usado em tarefas de pré-processamento, tais como remoção de pequenos detalhes de uma imagem, antes da extração de objetos, ou para conexão de pequenas interrupções em linhas ou curvas. A redução de ruído pode ser realizada fazendo o borramento. Filtros lineares de suavização: a saída de um filtro espacial linear de suavização é simplesmente a média dos pixels contidos na vizinhança. Esses filtros são chamados de filtros de média, ou filtros de passa-baixa. A idéia dos filtros de suavização é a substituição de valores de cada pixel pela média da sua vizinhança definida pela máscara, o que resulta numa imagem com reduzidas transições agudas em intensidades. Como os ruídos aleatórios normalmente são constituídos de transições agudas de intensidade, uma aplicação óbvia da suavização é a redução de ruído. Contudo, as arestas (edges) também consistem de transições agudas de intensidade, implicando que a suavização gera um efeito indesejado de borrar as arestas.
 e para redução de ruído. O borramento é usado em tarefas de pré-processamento, tais como remoção de pequenos detalhes de uma imagem, antes da extração de objetos, ou para conexão de pequenas interrupções em linhas ou curvas. A redução de ruído pode ser realizada fazendo o borramento. Filtros lineares de suavização: a saída de um filtro espacial linear de suavização é simplesmente a média dos pixels contidos na vizinhança. Esses filtros são chamados de filtros de média, ou filtros de passa-baixa. A idéia dos filtros de suavização é a substituição de valores de cada pixel pela média da sua vizinhança definida pela máscara, o que resulta numa imagem com reduzidas transições agudas em intensidades. Como os ruídos aleatórios normalmente são constituídos de transições agudas de intensidade, uma aplicação óbvia da suavização é a redução de ruído. Contudo, as arestas (edges) também consistem de transições agudas de intensidade, implicando que a suavização gera um efeito indesejado de borrar as arestas.")
15
Duas máscaras de filtragem de suavização (média) 3x3.
O multiplicador constante é igual a 1 dividido pela soma dos valores dos coeficientes, requeridos para computar a média. A segunda máscara calcula uma média ponderada, o que implica na redução do borramento no processo de suavização.

16
(a) Imagem original, de tamanho 500x500.
(b)-(f) resultado da suavização com filtros de média de tamanho m=3,5,9,15 e 35.
-(f) resultado da suavização com filtros. de média de tamanho m=3,5,9,15 e 35.")
17
Imagem de tamanho 528x485 pixels do telescópio Hubble.
Imagem filtrada com uma máscara de média 15x15. Resultado da limiarização sobre (b).
![]()
18
FILTROS ESTATÍSTICOS (não lineares)
São filtros espaciais não-lineares cuja resposta é baseada na ordenação (ranking) dos pixels contidos na área de imagem enquadrada pelo filtro, e então substituir o valor do pixel central com o valor determinado pelo resultado do ranking. O filtro mais conhecido nessa categoria é o filtro da mediana, que substitui o valor de um pixel pela mediana dos valores de intensidade na vizinhança do pixel. Os filtros de mediana são populares porque para certos tipos de ruído, eles produzem excelente capacidade de redução, com consideravelmente menos borramento que os filtros lineares de mesmo tamanho. Os filtros de mediana são particularmente efetivos na presença de ruídos impulsivos, também, chamados de ruídos sal-e-pimenta (salt-and-pepper noise), devido a aparência de pontos brancos e pretos sobrepostos na imagem.
 dos pixels contidos na área de imagem enquadrada pelo filtro, e então substituir o valor do pixel central com o valor determinado pelo resultado do ranking. O filtro mais conhecido nessa categoria é o filtro da mediana, que substitui o valor de um pixel pela mediana dos valores de intensidade na vizinhança do pixel. Os filtros de mediana são populares porque para certos tipos de ruído, eles produzem excelente capacidade de redução, com consideravelmente menos borramento que os filtros lineares de mesmo tamanho. Os filtros de mediana são particularmente efetivos na presença de ruídos impulsivos, também, chamados de ruídos sal-e-pimenta (salt-and-pepper noise), devido a aparência de pontos brancos e pretos sobrepostos na imagem.")
19
MEDIANA A mediana, x , de um conjunto de valores é tal que metade dos valores do conjunto são abaixo ou igual a x , e metade são acima ou igual a x . Para realizar a filtragem da mediana num ponto da imagem, primeiro ordenamos os valores dos pixels na vizinhança, determinamos a sua mediana, e atribuímos aquele valor ao pixel correspondente na imagem filtrada. Por exemplo, numa vizinhança 3x3 a mediana é o quinto maior valor; numa vizinhança 5x5, é o 130 valor; e assim por diante. Supondo que a vizinhança 3x3 tem valores (10,20,20,20,15,20,20,25,100). Esses valores ordenados são (10,15,20,20,20,20,20,25,100), o que resulta na mediana 20.
. Esses valores ordenados são (10,15,20,20,20,20,20,25,100), o que resulta na mediana 20.")
20
Imagem de raios-X de circuito impresso corrompido
por ruído sal-e-pimenta. (b) Redução do ruído com uma máscara de média 3x3. (c) Redução do ruído com uma máscara de mediana 3x3.
 Redução do ruído com uma máscara de média 3x3. (c) Redução do ruído com uma máscara de mediana 3x3.")
21
OUTROS FILTROS ESTATÍSTICOS
Embora a mediana seja um filtro mais usado em processamento de imagens, existem outros filtros, como o filtro do máximo, e o filtro do mínimo. O filtro do máximo (max filter) encontra o ponto mais brilhante. A resposta de um filtro 3x3 é dada por R = max{zk | k = 1,2,...,9} O filtro do mínimo (min filter) é oposto ao máximo.
 encontra o ponto mais brilhante. A resposta de um filtro 3x3 é dada por. R = max{zk | k = 1,2,...,9} O filtro do mínimo (min filter) é oposto ao máximo.")
22
FILTROS ESPACIAIS DE SHARPENING
O principal objetivo do sharpening é acentuar transições na intensidade. O uso de sharpening de imagens inclui aplicações desde a impressão eletrônica, imagens médicas até inspeção industrial e automação em sistemas militares. Como a suavização de imagens é realizada usando a média, que é análoga à integração, o sharpening é realizado por diferenciação.

23
FUNDAMENTOS As derivadas de uma função digital são definidas em termos de diferenças. Existem várias formas de definir essas diferenças, contudo, a primeira derivada deve ser: (1) zero em áreas de intensidade constante; (2) não-zero no começo de um degrau de intensidade ou de rampa; e (2) não-zero em rampas. e a segunda derivada deve ser: (1) zero em áreas constantes; (2) não-zero no início e fim de um degrau de intensidade ou de rampas; e (3) zero ao longo de rampas de inclinação constante.
 zero em áreas de intensidade constante; (2) não-zero no começo de um degrau de intensidade ou de rampa; e. (2) não-zero em rampas. e a segunda derivada deve ser: (1) zero em áreas constantes; (2) não-zero no início e fim de um degrau de intensidade ou de rampas; e. (3) zero ao longo de rampas de inclinação constante.")
24
(cont.) A definição básica da derivada de primeira ordem e uma função unidimensional f(x) é a diferença A derivada é parcial para usar a mesma notação quando considermos função de duas variáveis f(x,y). A derivada de segunda ordem de f(x) é a diferença A fig ilustra essas duas derivadas. eq
. A derivada de segunda ordem de f(x) é a diferença. A fig ilustra essas duas derivadas. eq")
25
Ilustração da primeira
e segunda derivada de uma função 1D (perfil de intensidade de uma imagem).
.")
26
LAPLACIANO Estamos interessados em filtros isotrópicos, ou invariantes a rotação, para sharpening. O Laplaciano é um operador derivativo isotrópico, que para uma função de duas dimensões f(x,y) é definido como Como derivadas de qualquer ordem são operações lineares, o Laplaciano é um operador linear. De forma discreta usamos a equação 3.6-2, com duas variáveis: Portanto o Laplaciano é dado por: (eq.3.6-6)
 é definido como. Como derivadas de qualquer ordem são operações lineares, o Laplaciano é um operador linear. De forma discreta usamos a equação 3.6-2, com duas variáveis: Portanto o Laplaciano é dado por: (eq.3.6-6)")
27
Máscara de filtro usada
para implementar a eq (b) Máscara usada para implementar uma extensão dessa equação que inclui termos diagonais. (c) e (d) Duas outras imple- mentações do Laplaciano encontrado frequentemente na prática.
 Máscara usada para. implementar uma extensão. dessa equação que inclui. termos diagonais. (c) e (d) Duas outras imple- mentações do Laplaciano. encontrado frequentemente. na prática.")
28
Devido o Laplaciano ser um operador derivativo, o seu uso realça as descontinuidades de intensidade numa imagem e desenfatiza regiões com níveis de intensidade que variam lentamente. Isso tende a produzir imagens que tenham linhas de arestas e outras descontinuidades, superpostas no fundo escuro. Os fatores de fundo podem ser recuperados, mantendo os efeitos do Laplaciano, simplesmente adicionando a imagem Laplaciana à imagem original. É importante considerar que máscara de Laplaciano é usada. Se a máscara usada tem o coeficiente central negativo, então subtrai-se a imagem Laplaciana para obtenção do resultado: onde f(x,y) e g(x,y) são as imagens de entrada e realçada, respectivamente. A constante é c = -1 se os filtros Laplacianos são da Fig.3.37 (a) ou (b); e c = 1, caso sejam usados os outros dois filtros. Eq (3.6-7)
 e g(x,y) são as imagens de entrada e realçada, respectivamente. A constante é c = -1 se os filtros Laplacianos são da Fig.3.37 (a) ou (b); e c = 1, caso sejam usados os outros dois filtros. Eq (3.6-7)")
29
Imagem borrada do polo norte da Lua (b) Laplaciano sem escala(os valores negativos são apenas zerados) (c) Laplaciano com escala (soma de uma constante para que todos os pixels se enquadrem em [0,255]) (d) Imagem realçada usando máscara da fig. 3.37(a) e equação 3.6-7 (e) Resultado de uso da máscara da fig. 3.37(b).
 Laplaciano com escala. (soma de uma constante para. que todos os pixels se. enquadrem em [0,255]) (d) Imagem realçada usando. máscara da fig. 3.37(a) e equação (e) Resultado de uso da. máscara da fig. 3.37(b).")
30
UNSHARP MASKING E HIGHBOOST FILTERING
O processo usado por muitos anos em indústrias de impressão e publicação para o realce de imagens consiste na subtração de uma imagem em versão suavizada (unsharped, smoothed) da imagem original. Esse processo chamado unsharp masking consiste nos seguintes passos: Borrar a imagem original Subtrair a imagem borrada da original ( a diferença resultante é chamada de máscara) Adicionar a máscara à original. Chamando de a imagem borrada, o unsharp masking é expresso como: Então é adicionada uma porção ponderada da máscara à imagem original: onde um peso k positivo foi incluso para generalização. Quando k = 1, tem-se o unsharp masking definido anteriormente. Quando k > 1, o processo é referido como highboost filtering. Se k<1 enfatiza-se pouco a contribuição da máscara.
 da imagem original. Esse processo chamado unsharp masking consiste nos seguintes passos: Borrar a imagem original. Subtrair a imagem borrada da original ( a diferença resultante é chamada de máscara) Adicionar a máscara à original. Chamando de a imagem borrada, o unsharp masking é expresso como: Então é adicionada uma porção ponderada da máscara à imagem original: onde um peso k positivo foi incluso para generalização. Quando k = 1, tem-se o unsharp masking definido anteriormente. Quando k > 1, o processo é referido como highboost filtering. Se k<1 enfatiza-se pouco a contribuição da máscara.")
31
Ilustração 1D do mecanismo de unsharp masking. Sinal original Sinal borrado com o original mostrado em pontilhado (c) Unsharp mask (d) Sinal realçado obtido somando (c) a (a).
 Unsharp mask. (d) Sinal realçado obtido. somando (c) a (a).")
32
Imagem original Resultado de borramento com filtro Gaussiano Máscara (unsharp mask) Resultado de unsharp masking k = 1 Resultado de highboost filtering k > 1

33
SHARPENING USANDO GRADIENTE
Para uma função f(x,y) o gradiente é definido como Esse vetor tem a propriedade de apontar para a direção da maior taxa de variação de f na posição (x,y). A magnitude do vetor gradiente é denotado por M(x,y) , onde é o valor em (x,y) da taxa de mudança na direção do vetor gradiente. Eq
 o gradiente é definido como. Esse vetor tem a propriedade de apontar para a direção da maior taxa de variação de f na posição (x,y). A magnitude do vetor gradiente é denotado por M(x,y) , onde. é o valor em (x,y) da taxa de mudança na direção do vetor gradiente. Eq")
34
Como os componentes do vetor gradiente são derivadas, eles são operadores lineares. Contudo, a magnitude desse vetor não é operador linear devido ao uso da raiz quadrada. Por outro lado, as derivadas parciais da eq não são invariantes à rotação (isotrópicas), mas a magnitude do vetor gradiente é. Em algumas implementações, é mais adequado computacionalmente aproximar as operações quadrado e raiz quadrada por valores absolutos Eq
, mas a magnitude do vetor gradiente é. Em algumas implementações, é mais adequado computacionalmente aproximar as operações quadrado e raiz quadrada por valores absolutos. Eq")
35
Uma região 3x3 de uma imagem (z’s são intensidade) (b)-(c) operadores de gradiente cruzada de Roberts (d)-(e) operadores de Sobel. Todos os coeficientes de máscaras somam zero, como se espera de um operador derivativo.
-(e) operadores de Sobel. Todos os coeficientes de máscaras somam zero, como se espera de um operador derivativo.")
36
Imagem óptica de lente de contato (notar os defeitos no
contorno a 4 e 5 horas). (b) Gradiente de Sobel.
. (b) Gradiente de Sobel.")
37
COMBINAÇÃO DE MÉTODOS ESPACIAIS
A imagem da Fig. 3.43a é do escaneamento completo do corpo humano, usado para detectar doenças, tais como infecção no osso e tumores. O objetivo é melhorar essa imagem realçando e trazendo mais detalhes. O baixo intervalo dinâmico dos níveis de intensidade e alto ruido contido torna difícil o melhoramento. A estratégia a ser seguida é utilizar o Laplaciano para ressaltar os detalhes finos e o gradiente para melhorar as arestas. Finalmente tenta-se aumentar o intervalo dinâmico dos níveis de intensidade usando uma transformação de intensidade. A Fig. 3.43b mostra o Laplaciano da imagem original, obtida usando o filtro da Fig. 3.37d. Essa imagem foi escalada (apenas para mostrar) usando a mesma técnica da Fig. 3.38c. Podemos obter uma imagem realçada adicionando a Fig. 3.43(a) e (b) conforme Fig.3.43c, onde é possível notar o realce de ruídos. Uma forma de reduzir ruído é usar o filtro da mediana. Contudo, o filtro da mediana é um processo não linear capaz de remover fatores da imagem. Isso é inaceitável em processamento de imagens médicas.
 usando a mesma técnica da Fig. 3.38c. Podemos obter uma imagem realçada adicionando a Fig. 3.43(a) e (b) conforme Fig.3.43c, onde é possível notar o realce de ruídos. Uma forma de reduzir ruído é usar o filtro da mediana. Contudo, o filtro da mediana é um processo não linear capaz de remover fatores da imagem. Isso é inaceitável em processamento de imagens médicas.")
38
Um procedimento alternativo é usar a máscara formada de uma versão suavizada do gradiente da imagem original. A motivação é baseada nas derivadas de primeira e segunda ordem. O Laplaciano sendo de segunda ordem, tem vantagem de melhorar os detalhes, porém causa a produção de mais ruídos que o gradiente. Esse ruído é mais visível em áreas mais suaves. O gradiente tem uma resposta mais forte em áreas de transições fortes (rampas e degraus) que o Laplaciano. A resposta do gradiente a ruído e detalhes finos é menor que o Laplaciano e pode ser ainda reduzida suavizando o gradiente com um filtro de média. A idéia é suavizar o gradiente e multiplicar o resultado pela imagem Laplaciana. Neste contexto pode-se ver o gradiente suavizado como uma máscara. O produto irá preservar detalhes em áreas mais intensas enquanto o ruído é reduzido em áreas relativamente planas. Esse processo é uma combinação dos melhores fatores do Laplaciano e do gradiente. O resultado é adicionado à imagem original para obter uma imagem final realçada (Fig. 3.43d).
 que o Laplaciano. A resposta do gradiente a ruído e detalhes finos é menor que o Laplaciano e pode ser ainda reduzida suavizando o gradiente com um filtro de média. A idéia é suavizar o gradiente e multiplicar o resultado pela imagem Laplaciana. Neste contexto pode-se ver o gradiente suavizado como uma máscara. O produto irá preservar detalhes em áreas mais intensas enquanto o ruído é reduzido em áreas relativamente planas. Esse processo é uma combinação dos melhores fatores do Laplaciano e do gradiente. O resultado é adicionado à imagem original para obter uma imagem final realçada (Fig. 3.43d).")
39
Imagem do corpo completo (b) Laplaciano de (a) (c) Imagem realçada obtido somando (a) e (b) (d) Gradiente de Sobel de (a)
 e (b) (d) Gradiente de Sobel de (a) .")
40
A Fig. 3.43d mostra o gradiente de Sobel da imagem original, computado usando a eq Os componentes gx e gy foram obtidos usando as máscaras da Fig. 3.41(d) e (e), respectivamente. Como esperado, as arestas são mais dominantes nessa imagem que na imagem Laplaciano. A Fig. 3.43e mostra uma imagem gradiente suavizada obtida usando um filtro de média de tamanho 5x5. As duas imagens gradientes foram escaladas para mostrar da mesma forma que a imagem Laplaciano. O produto da imagem Laplaciana e a imagem gradiente suavizada é mostrado na Fig.3.43f. Nota-se a predominância de arestas fortes e falta relativa de ruídos, que é o nosso objetivo central. Adicionando a imagem produto à original resulta na Fig. 3.43g. O significante incremento no realce de detalhes é evidente, incluindo costela, coluna vertebral, pelvis e crânio. Para aumentar o intervalo dinâmico a etapa final é usar uma função de transformação, Fig.3.43h, obtida com uma transformação de potência ( power-law) (eq.3.2-3) com g=0,5 e c =1.
 (eq.3.2-3) com g=0,5 e c =1.")
41
(e) Imagem Sobel suavizada com um filtro de média 5x5. (f) Imagem de máscara formada pelo produto de (c) e (e) (g) Imagem realçada obtida somando (a) e (f) (h) Resultado final obtido aplicando uma transfor- mação de potência (power-law) sobre (g). Comparar (g) e (h) com (a)
 e (e) (g) Imagem realçada. obtida somando (a) e (f) (h) Resultado final obtido. aplicando uma transfor- mação de potência. (power-law) sobre (g). Comparar (g) e (h) com (a)")
42
a b c d e f g h Comparar (a) com (g) e (h).
 com (g) e (h).")
43
TÉCNICAS FUZZY PARA AS TRANSFORMAÇÕES E FILTRAGENS ESPACIAIS
Uma idéia central na teoria dos conjuntos é a noção de associação (membership). Estamos acostumados a lidar com conjuntos crisp cuja associação somente pode ser verdade ou falso no senso tradicional ou lógica Booleana binária, com 1 tipicamente indicando verdade e 0 indicando falso. Por exemplo, seja Z o conjunto de todas as pessoas, e supõe-se que definimos um subconjunto, A de Z, chamado conjunto de pessoas jovens. Para formar esse subconjunto, precisamos definir uma função de associação que atribui o valor 1 ou 0 a cada elemento, z, de Z. Como estamos lidando com lógica binária, a função de associação simplesmente define um limiar igual ou abaixo do qual uma pessoa é considerada jovem, e acima do qual a pessoa é considerada não-jovem. A Fig resume esse conceito usando o limiar de 20 anos e chamando mA(z) a função de associação.
. Estamos acostumados a lidar com conjuntos crisp cuja associação somente pode ser verdade ou falso no senso tradicional ou lógica Booleana binária, com 1 tipicamente indicando verdade e 0 indicando falso. Por exemplo, seja Z o conjunto de todas as pessoas, e supõe-se que definimos um subconjunto, A de Z, chamado conjunto de pessoas jovens. Para formar esse subconjunto, precisamos definir uma função de associação que atribui o valor 1 ou 0 a cada elemento, z, de Z. Como estamos lidando com lógica binária, a função de associação simplesmente define um limiar igual ou abaixo do qual uma pessoa é considerada jovem, e acima do qual a pessoa é considerada não-jovem. A Fig resume esse conceito usando o limiar de 20 anos e chamando mA(z) a função de associação.")
44
Vemos uma dificuldade imediata nesta formulação: uma pessoa de 20 anos de idade é considerada jovem, mas uma pessoa cuja idade é 20 anos e 1 segundo não é um membro do conjunto de pessoas jovens. Esse é um problema fundamental com conjuntos crisp que limitam o uso da teoria de conjuntos clássica em muitas aplicações. O que necessitamos é maior flexibilidade no que significa “jovem”, isto é, uma transição de jovem para não-jovem. A Fig. 3.44b mostra uma possibilidade. A idéia dessa função é que ela permite um grau de juventude (youngness). Podemos fazer afirmações tais como uma pessoa 50% jovem, no meio da rampa; e não tão jovem, final da rampa. Esse tipo de incerteza no que significa jovem é mais compatível com o que o ser humano pensa quanto a idade. Assim, a função de associação com infinitos valores é a base da lógica fuzzy, e o conjunto gerado usando essa função pode ser visto como conjunto fuzzy.
. Podemos fazer afirmações tais como uma pessoa 50% jovem, no meio da rampa; e não tão jovem, final da rampa. Esse tipo de incerteza no que significa jovem é mais compatível com o que o ser humano pensa quanto a idade. Assim, a função de associação com infinitos valores é a base da lógica fuzzy, e o conjunto gerado usando essa função pode ser visto como conjunto fuzzy.")
45
Funções de associação (membership) usadas para gerar:
Um conjunto crisp e Um conjunto fuzzy.

46
PRINCÍPIOS DA TEORIA DE LÓGICA FUZZY
Definições: Seja Z um conjunto de elementos (objetos) com um elemento genérico denotado por z, ou seja Z= {z}. Este conjunto é chamado de universo de discurso. Um conjunto fuzzy A em Z é caracterizado pela função de associação mA(z) que associa a cada elemento de Z um número real no intervalo [0,1]. O valor de mA(z) representa o grau de associação de z em A. Quanto maior o valor de mA(z), maior é o grau de associação de z em A. O conceito de “pertencer a” em conjuntos convencionais não tem mesmo sentido na teoria de conjunto fuzzy. Em conjuntos fuzzy dizemos que todos os z’s para os quais mA(z)=1 são membros completos do conjunto, todos os z’s para os quais mA(z) =0 não são membros do conjunto, e todos os z’s em que mA(z) estiver entre 0 e 1 tem associação parcial no conjunto. Portanto, um conjunto fuzzy é um par ordenado consistindo de valores de z e uma função de associação correspondente que atribui um grau de associação a cada z. Isto é
 com um elemento genérico denotado por z, ou seja Z= {z}. Este conjunto é chamado de universo de discurso. Um conjunto fuzzy A em Z é caracterizado pela função de associação mA(z) que associa a cada elemento de Z um número real no intervalo [0,1]. O valor de mA(z) representa o grau de associação de z em A. Quanto maior o valor de mA(z), maior é o grau de associação de z em A. O conceito de pertencer a em conjuntos convencionais não tem mesmo sentido na teoria de conjunto fuzzy. Em conjuntos fuzzy dizemos que todos os z’s para os quais mA(z)=1 são membros completos do conjunto, todos os z’s para os quais mA(z) =0 não são membros do conjunto, e todos os z’s em que mA(z) estiver entre 0 e 1 tem associação parcial no conjunto. Portanto, um conjunto fuzzy é um par ordenado consistindo de valores de z e uma função de associação correspondente que atribui um grau de associação a cada z. Isto é.")
47
Quando as variáveis são contínuas, o conjunto A pode ter um número infinito de elementos.
Quando os valores de z são discretos, podemos mostrar os elementos de A explicitamente. Por exemplo, se o incremento de idade da Fig.3.44 for limitado em números inteiros, teremos A = {(1,1),(2,1),(3,1)..., (20,1),(21,0.9),(22,0.8),...,(25,0.5),(24,0.4),...,(29,0.1)} onde por exemplo, o elemento (22,0.8) denota que a idade 22 tem um grau 0.8 de associação. Em outras palavras, um conjunto fuzzy discreto é o conjunto de pontos de uma função que mapeia cada elemento do domínio (universo de discurso) em um número maior que 0 e menor ou igual a 1. Quando mA(z) pode ter somente 0 e 1, a função de associação reduz-se a uma função característica familiar, do conjunto crisp A. Assim, os conjuntos ordinários são um caso especial de conjuntos fuzzy.
,(2,1),(3,1)..., (20,1),(21,0.9),(22,0.8),...,(25,0.5),(24,0.4),...,(29,0.1)} onde por exemplo, o elemento (22,0.8) denota que a idade 22 tem um grau 0.8 de associação. Em outras palavras, um conjunto fuzzy discreto é o conjunto de pontos de uma função que mapeia cada elemento do domínio (universo de discurso) em um número maior que 0 e menor ou igual a 1. Quando mA(z) pode ter somente 0 e 1, a função de associação reduz-se a uma função característica familiar, do conjunto crisp A. Assim, os conjuntos ordinários são um caso especial de conjuntos fuzzy.")
48
Conjunto vazio: um conjunto fuzzy é vazio se e somente se a função de associação é identicamente zero em Z. Igualdade: dois conjuntos A e B são iguais, A=B, se e somente se Complemento: o complemento (NOT) de um conjunto A, denotado , ou NOT(A), é definido como o conjunto cuja função de associação é Subconjunto: um conjunto A é um subconjunto de um conjunto B se e somente se
 de um conjunto A, denotado , ou NOT(A), é definido como o conjunto cuja função de associação é. Subconjunto: um conjunto A é um subconjunto de um conjunto B se e somente se.")
49
União: a união (OR) de dois conjuntos A e B, denotado , ou A OR B, é um conjunto U com a função de associação Intersecção: a intersecção (AND) de dois conjuntos A e B, denotado ou A AND B (eq )
 de dois conjuntos A e B, denotado ou A AND B. (eq )")
50
Funções de associação de dois conjuntos A e B
Função de associação do complemento de A e (d) funções de associação da união e intersecção dos dois conjuntos, respectivamente
 funções de associação da união e intersecção dos. dois conjuntos, respectivamente.")
51
Embora a lógica fuzzy e probabilidade operem no mesmo intervalo [0,1], existe uma distinção significante entre elas. Considerando o exemplo da Fig. 3.44, uma afirmação probabilística seria: “Existe uma chance de 50% de que uma pessoa seja jovem.”, enquanto que a afirmação fuzzy seria “O grau de associação de uma pessoa dentro do conjunto de pessoas jovens é 0.5.”. Na primeira afirmação, a pessoa pode estar ou no conjunto de jovens ou no conjunto de não-jovens, e existe uma chance de 50% de saber em que conjunto pertence. A segunda afirmação pressupõe que uma pessoa é jovem em certo grau, neste caso de 0.5.
![Embora a lógica fuzzy e probabilidade operem no mesmo intervalo [0,1], existe uma distinção significante entre elas.](http://slideplayer.com.br/slide/335877/1/images/51/Embora+a+l%C3%B3gica+fuzzy+e+probabilidade+operem+no+mesmo+intervalo+%5B0%2C1%5D%2C+existe+uma+distin%C3%A7%C3%A3o+significante+entre+elas..jpg "Considerando o exemplo da Fig. 3.44, uma afirmação probabilística seria: Existe uma chance de 50% de que uma pessoa seja jovem. , enquanto que a afirmação fuzzy seria O grau de associação de uma pessoa dentro do conjunto de pessoas jovens é Na primeira afirmação, a pessoa pode estar ou no conjunto de jovens ou no conjunto de não-jovens, e existe uma chance de 50% de saber em que conjunto pertence. A segunda afirmação pressupõe que uma pessoa é jovem em certo grau, neste caso de 0.5.")
52
Eq. 3.8-6 Eq. 3.8-7 Eq. 3.8-8 ALGUMAS FUNÇÕES DE ASSOCIAÇÃO COMUNS
Triangular: Trapezoidal: Sigma: Eq Eq Eq

53
Eq. 3.8-9 Eq. 3.8-10 Eq. 3.8-11 S-shape: Bell-shape:
Gaussiano truncado: Eq Eq Eq

54
Funções de associação correspondentes às equações a 3.8-11

55
USANDO CONJUNTOS FUZZY
Supõe-se que estamos interessados em usar cores para categorizar um certo tipo de frutas em 3 grupos: não-madura (verdant), meio-madura(half-mature) e madura (mature). Assume-se que as frutas não-maduras são verdes (green), meio-maduras são amarelas(yellow), e maduras são vermelhas(red). Os rótulos verde, amarelo e vermelho são descrições vagas de sensação de cor. Esses rótulos devem ser expressos em formato fuzzy. Eles devem ser fuzzificados. Isso pode ser feito definindo a função de associação de cor proporcional ao comprimento de onda da luz, como a Fig. 3.47a. Neste contexto, diz-se que cor é uma variável linguística, e uma cor particular é um valor linguístico. Um valor z0, é fuzzificado usando uma função de associação para mapeá-lo no intervalo [0,1], como mostra a Fig. 3.47b.
, meio-madura(half-mature) e madura (mature). Assume-se que as frutas não-maduras são verdes (green), meio-maduras são amarelas(yellow), e maduras são vermelhas(red). Os rótulos verde, amarelo e vermelho são descrições vagas de sensação de cor. Esses rótulos devem ser expressos em formato fuzzy. Eles devem ser fuzzificados. Isso pode ser feito definindo a função de associação de cor proporcional ao comprimento de onda da luz, como a Fig. 3.47a. Neste contexto, diz-se que cor é uma variável linguística, e uma cor particular é um valor linguístico. Um valor z0, é fuzzificado usando uma função de associação para mapeá-lo no intervalo [0,1], como mostra a Fig. 3.47b.")
56
Funções de associação usadas para fuzzificar a cor (b) Fuzzificar uma cor específica z0.
 Fuzzificar uma cor específica z0.")
57
Essas regras representam o total do conhecimento sobre esse problema.
O conhecimento específico do problema pode ser formalizado na forma das regras fuzzy IF-THEN: R1: IF the color is green, THEN the fruit is verdant. OR R2: IF the color is yellow, THEN the fruit is half-mature. R3: IF the color is red, THEN the fruit is mature. Essas regras representam o total do conhecimento sobre esse problema.

58
Este processo é conhecido como implicação ou inferência.
O próximo passo é achar um meio de usar entradas (cor, comprimento de onda) e a base de conhecimento representada pelas regras IF-THEN para criar a saída do sistema fuzzy. Este processo é conhecido como implicação ou inferência. Contudo, antes da implicação poder ser aplicada, o antecedente de cada regra deve ser processado par permitir um único valor. Múltiplas partes de um antecedente são conectadas por ANDs e ORs. Baseadas nas definições, isso significa realizar as operações de min e max. Para simplificar a explicação, lidamos inicialmente com regras cujos antecedentes contenham somente uma parte. Como as entradas são fuzzy, as saídas também são fuzzy, e portanto devemos definir as funções de associação para as saídas. A Fig mostra as funções de associação das saídas fuzzy que serão usadas no exemplo. Note que a variável independente das saídas é maturidade, que é diferente das variáveis independentes de entradas.
 e a base de conhecimento representada pelas regras IF-THEN para criar a saída do sistema fuzzy. Este processo é conhecido como implicação ou inferência. Contudo, antes da implicação poder ser aplicada, o antecedente de cada regra deve ser processado par permitir um único valor. Múltiplas partes de um antecedente são conectadas por ANDs e ORs. Baseadas nas definições, isso significa realizar as operações de min e max. Para simplificar a explicação, lidamos inicialmente com regras cujos antecedentes contenham somente uma parte. Como as entradas são fuzzy, as saídas também são fuzzy, e portanto devemos definir as funções de associação para as saídas. A Fig mostra as funções de associação das saídas fuzzy que serão usadas no exemplo. Note que a variável independente das saídas é maturidade, que é diferente das variáveis independentes de entradas.")
59
Funções de associação caracterizando as saídas não-madura, meio-madura e madura

60
As Figs e 3.48 juntas com a regra básica, contêm todas as informações requeridas para relacionar entradas e saídas. Por exemplo, notamos que a expressão red AND mature nada mais é que a intersecção (AND) definida anteriormente. No presente caso, as variáveis independentes das funções de associação de entradas e saídas são diferentes, tal que o resultado seja bidimensional. Por exemplo, a Fig. 3.49(a) e (b) mostram as funções de associação de red e mature e a Fig. 3.49(c) mostra como elas se combinam em duas dimensões. Para achar o resultado da operação AND entre essas duas funções, lembrar da eq em que AND é definido como o mínimo das duas funções. A Fig. 3.49(d) mostra o resultado da operação AND. Eq
 definida anteriormente. No presente caso, as variáveis independentes das funções de associação de entradas e saídas são diferentes, tal que o resultado seja bidimensional. Por exemplo, a Fig. 3.49(a) e (b) mostram as funções de associação de red e mature e a Fig. 3.49(c) mostra como elas se combinam em duas dimensões. Para achar o resultado da operação AND entre essas duas funções, lembrar da eq em que AND é definido como o mínimo das duas funções. A Fig. 3.49(d) mostra o resultado da operação AND. Eq")
61
Forma da função de associação relativa à cor red e (b) função de de saída correspondente. Essas 2 funções são relacionadas pela regra R3. (c) Representação combinada das duas funções (d) AND de (a) e (b)
 Representação. combinada das. duas funções. (d) AND de (a) e (b)")
62
A equação é a combinação geral envolvendo duas funções de associação. Na prática estamos interessados na saída resultante de uma entrada específica, z0. O grau de associação do componente de cor red em resposta a essa entrada é simplesmente um valor escalar, mred(z0). Achamos a saída correspondente à regra R3 e essa entrada específica realizando a operação AND entre mred(z0) e a combinação, m3(z,v), avaliado também em z0. Como visto antes, a operação AND é implementada usando a operação de mínimo: onde Q3(v) denota a saída devida a regra R3 e uma entrada específica, z0. A única variável em Q3 é a variável de saída, v, como esperado. Para interpretar a equação graficamente consideramos a Fig. 3.49d novamente, que mostra a função m3(z,v). Realizando a operação de mínimo de uma constante positiva, c, e essa função, corta todos os valores de m3(z,v) acima da constante, como mostra a Fig. 3.50(a). Contudo estamos interessados somente no valor (z0) de cores, em que o resultado é uma secção ao longo do eixo de maturidade, v, como mostra a Fig.3.50b. Eq
. Achamos a saída correspondente à regra R3 e essa entrada específica realizando a operação AND entre mred(z0) e a combinação, m3(z,v), avaliado também em z0. Como visto antes, a operação AND é implementada usando a operação de mínimo: onde Q3(v) denota a saída devida a regra R3 e uma entrada específica, z0. A única variável em Q3 é a variável de saída, v, como esperado. Para interpretar a equação graficamente consideramos a Fig. 3.49d novamente, que mostra a função m3(z,v). Realizando a operação de mínimo de uma constante positiva, c, e essa função, corta todos os valores de m3(z,v) acima da constante, como mostra a Fig. 3.50(a). Contudo estamos interessados somente no valor (z0) de cores, em que o resultado é uma secção ao longo do eixo de maturidade, v, como mostra a Fig.3.50b. Eq")
63
Resultado da computação do mínimo de uma constante
arbitrária , c, e função m3(z,v) da eq O mínimo é equivalente a uma operação AND (b) Secção (linha escura) de uma cor específica, z0.
 da eq O mínimo é. equivalente a uma operação AND. (b) Secção (linha escura) de uma cor específica, z0.")
64
Usando a mesma linha de raciocínio, obtêm-se as respostas fuzzy devidas a outras duas regras e a entrada z0, como segue: Para obter a resposta global, a saída fuzzy completa é dada por que consiste na união dos três conjuntos fuzzy individuais. Eq Eq Eq

65
Funções de associação com uma cor específica, z0, selecionada. (b) Conjuntos fuzzy individuais obtidos das eq a 3.8-15 (c) Conjunto fuzzy final obtido usando Eq or
 Conjunto fuzzy. final obtido usando. Eq or")
66
Em outra forma, para r ={1,2,3}e s={green, yellow, red}, o que pode ser generalizado para qualquer número finito de funções de associação. O último passo é obter uma saída crisp, v0, do conjunto Q, usando um procedimento chamado defuzzificação. Uma das formas usadas é computar o centro de gravidade do conjunto. Assim, se Q(v) da equação pode ter K possíveis valores, Q(1), Q(2),...,Q(K), o seu centro de gravidade é dado por Avaliando essa equação com os valores discretos de Q na Fig.3.51c tem-se v0=72.3, indicando que a dada cor z0 implica na maturidade da fruta de aproximadamente 72%. Eq
 da equação pode ter K possíveis valores, Q(1), Q(2),...,Q(K), o seu centro de gravidade é dado por. Avaliando essa equação com os valores discretos de Q na Fig.3.51c tem-se v0=72.3, indicando que a dada cor z0 implica na maturidade da fruta de aproximadamente 72%. Eq")
67
Até o momento foi considerada a regra IF-THEN cujos antecedentes tem apenas uma parte, como “IF the color is red”. Regras contendo mais que uma parte deve ser combinada para obter um único número que representa o antecedente inteiro para aquela regra. Por exemplo, supõe-se que temos a regra: “IF the color is red OR the consistency is soft, THEN the fruit is mature”. A função de associação deve ser definida para a variável linguística soft. Então, para obter um único número para essa regra que leva em conta ambas as partes do antecedente, avaliamos primeiro um dado valor de cor de entrada red usando a função de associação red e um dado valor de consistência usando a função de associação soft. Esses dois resultados calculamos o máximo (OR) entre eles.
 entre eles.")
68
A Fig mostra o exemplo da fruta usando duas entradas: cor e consistência. Pode-se usar essa figura e resumir os principais passos seguidos na aplicação da lógica fuzzy baseada em regra: 1. Fuzzificar as entradas: para cada entrada escalar, achar os valores fuzzy correspondentes mapeando a entrada no intervalo [0,1], usando funções de associação aplicáveis em cada regra, como mostram as duas primeiras colunas da Fig 2. Realizar as operações lógicas fuzzy requeridas: as saídas de todas as partes de um antecedente devem ser combinadas para obter um único valor usando operação max ou min, dependendo se as partes são conectadas or ORs ou ANDs. Na Fig. 3.52, todas as partes dos antecedentes são conectadas por ORs.

69
3.Aplicar um método de implicação: a saída única de um antecedente de cada regra é usada para prover a saída correspondente. No exemplo usamos AND, que define a operação min. Isso corta a função de associação de saída correspondente, no valor provido pelo antecedente, como mostram as colunas 3 e 4 da Fig 4. Aplicar o método de agregação para os conjuntos fuzzy do passo 3: como a última coluna da Fig mostra, a saída de cada regra é um conjunto fuzzy. Elas devem ser combinadas para prover um único conjunto fuzzy de saída. A abordagem usada aqui é a OR das saídas individuais, portanto operação max é usada. 5. Defuzzificar a saída final do conjunto: Neste passo, obtemos uma saída escalar crisp. Isso é obtido computando o centro de gravidade do conjunto fuzzy agregado do passo 4.

70
Exemplo ilustrando os cinco passos básicos usados tipicamente para implementar um sistema baseado em regras fuzzy. Fuzzificação Operação lógica (só OR foi usado no exemplo) (3) Implicação (4) Agregação (5) defuzzificação
 (3) Implicação. (4) Agregação. (5) defuzzificação.")
72
Quando o número de variáveis é grande, é comum usar notação simplificada (variável, conjunto fuzzy). Por exemplo, a regra IF the color is green THEN the fruit is verdant pode ser escrita IF (z, green) THE (v, verdant), onde as variáveis z e v representam a cor e o grau de maturação, respectivamente; e green e verdant são dois conjuntos fuzzy definidos pelas funções de associação mgreen(z) e mverdant(z), respectivamente. Em geral com M regras IF-THEN e N variáveis de entrada, z1, z12,...zN, e uma variável de saída, v, tem-se:

73
USANDO CONJUNTOS FUZZY PARA TRANSFORMAÇÕES DE INTENSIDADE
Considerando o problema do melhoramento de contraste. A regra pode ser: IF pixel dark, THEN darker IF pixel gray, THEN gray IF pixel bright THEN brighter Em termos fuzzy os conceitos de dark, gray e bright são as funções de associação da Fig. 3.53a. Em termos de saída, considerar darker um grau de intensidade de dark, brighter um grau de intensidade de bright, e gray um grau de intensidade no meio da escala de cinza, como mostra a Fig. 3.53b.

74
Funções de associação de entrada associação de saída para melhoramento de contraste baseado em regras fuzzy.

75
Imagem de baixo contraste
Resultado da equalização de histograma Resultado de melhoramento de contraste usando regras baseadas em fuzzy

76
e (b) Histogramas das figs. 3.54(a) e (b) (c) Funções de associação de entrada superimpostas sobre (a) (d) Histograma da fig.3.54(c)
 Histograma da fig.3.54(c)")
77
USANDO CONJUNTOS FUZZY PARA FILTRAGEM ESPACIAL
A abordagem básica é definir as propriedades de vizinhança que capturam a essência de que filtros são supostos detectar. Por exemplo, considerar o problema de detectar o contorno entre regiões numa imagem. Podemos desenvolver um algoritmo de extração de contorno num conceito fuzzy simples: se um pixel pertence a uma região uniforme, então faça-o white; senão faça-o black, onde white e black são conjuntos fuzzy. Para o conceito de região uniforme, pode ser considerada a diferença de intensidades entre o pixel central e os seus vizinhos. Para a Fig. 3.56a as diferenças entre o pixel central (z5) e cada um dos vizinhos forma a subimagem de tamanho 3x3 da Fig. 3.56b.
 e cada um dos vizinhos forma a subimagem de tamanho 3x3 da Fig. 3.56b.")
78
Uma vizinhança de pixels 3x3
Diferenças de intensidade entre o pixel central e seu vizinho. Somente d2, d4, d6 e d8 foram usadas na presente aplicação para simplificação.
![]()
79
A Fig. 3.58 mostra graficamente a regra estabelecida acima.
Um conjunto de quatro regras IF-THEN e uma regra ELSE implementa a essência do conceito fuzzy mencionado anteriormente: IF d2 is zero AND d6 is zero THEN z5 is white IF d6 is zero AND d8 is zero THEN z5 is white IF d8 is zero AND d4is zero THEN z5 is white IF d4 is zero AND d2 is zero THEN z5 is white ELSE z5 is black Fig mostra possíveis funções de associação para os conjuntos fuzzy zero, black e white. A Fig mostra graficamente a regra estabelecida acima.

80
Função de associação do conjunto fuzzy zero
Funções de associação dos conjuntos fuzzy preto e branco

81
Conjunto fuzzy para detecção de contorno

82
CT de uma cabeça humana Resultado do filtro especial fuzzy usando funções de associação em fig e as regras na fig (c) Resultado após escalação de intensidade.
 Resultado após escalação de intensidade.")
Apresentações semelhantes














 podem ainda ser melhoradas pelo uso de Algoritmos de Propagação.>")


>")
 (b) Convenções de coordenadas:>")


