Carregar apresentação
A apresentação está carregando. Por favor, espere

1
CONCURSO LEVE SEU ROBO PARA A CAMPUS PARTY Coordenador da Equipe: Francisco Roberto N. Lima Fone: (81) 8577-0001 frnlima@ig.com.br
")
2
PROJETO HEXAPOD

3
INTRODUÇÃO

4
Hexapod, ou seis pés, refere-se a um robô de caminhada de seis patas. Construído a partir de estudos da natureza, baseado nos artrópodes, incluindo os insetos. Na verdade o projeto Hexapod é a criação de um robô inspirado por essas criaturas sobre uma plataforma robótica, é um trabalho experimental, mas relativamente complexo. A proposta é uma visão de um projeto genérico de robótica móvel e de baixo custo comparando-se com os robôs móveis existentes no mercado.

5
Os modelos mais sofisticados são capazes de se mover em terrenos variados e controlados a distância, podem realizar coisas do tipo: recolher matérias suspeitos como bombas, materiais radioativos, mapear um terreno utilizando um transmissor de GPS, filmar em tempo real, etc. Podem ser equipados com sensores podendo detectar obstáculos e mudar de direção ou realizar uma ação programada.

6
MOTIVAÇÃO

7
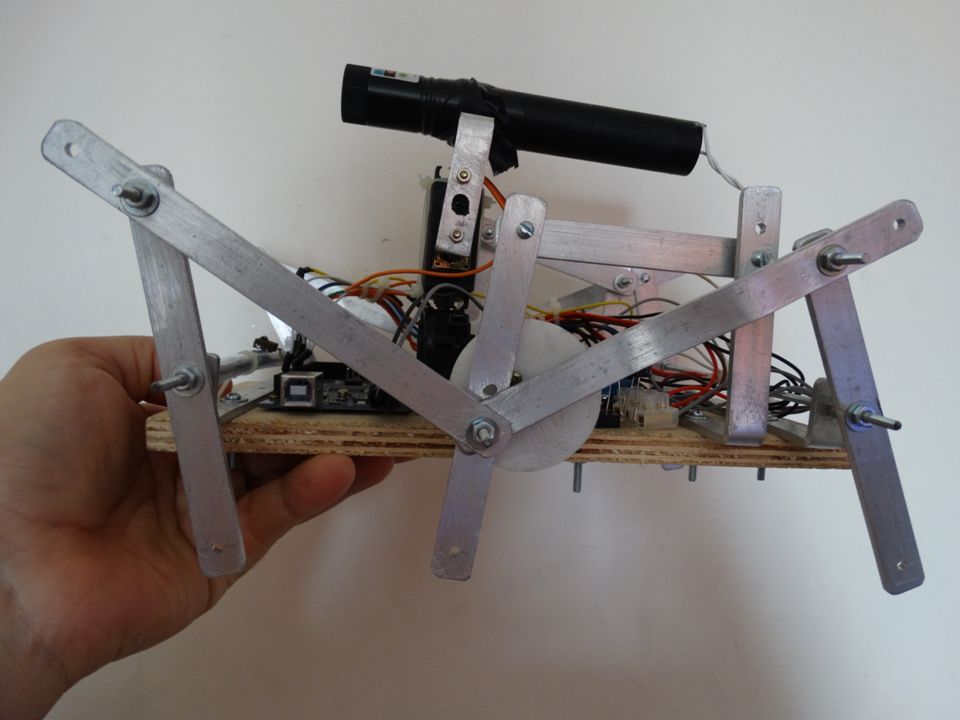
Fabricado em maior parte com material reciclado, o mecanismo se baseou no Critério de GRASHOF onde foi utilizado o movimento de Manivela Balancin, Triplo em um mesmo eixo, para conseguir o movimento das pernas. Com apenas um motor é possível o movimento de três pernas ao mesmo tempo.

8
Roda (manivela) Hastes (acoplador) Barra Fixa (base) Perna (seguidor)
 Hastes (acoplador) Barra Fixa (base) Perna (seguidor)")
10
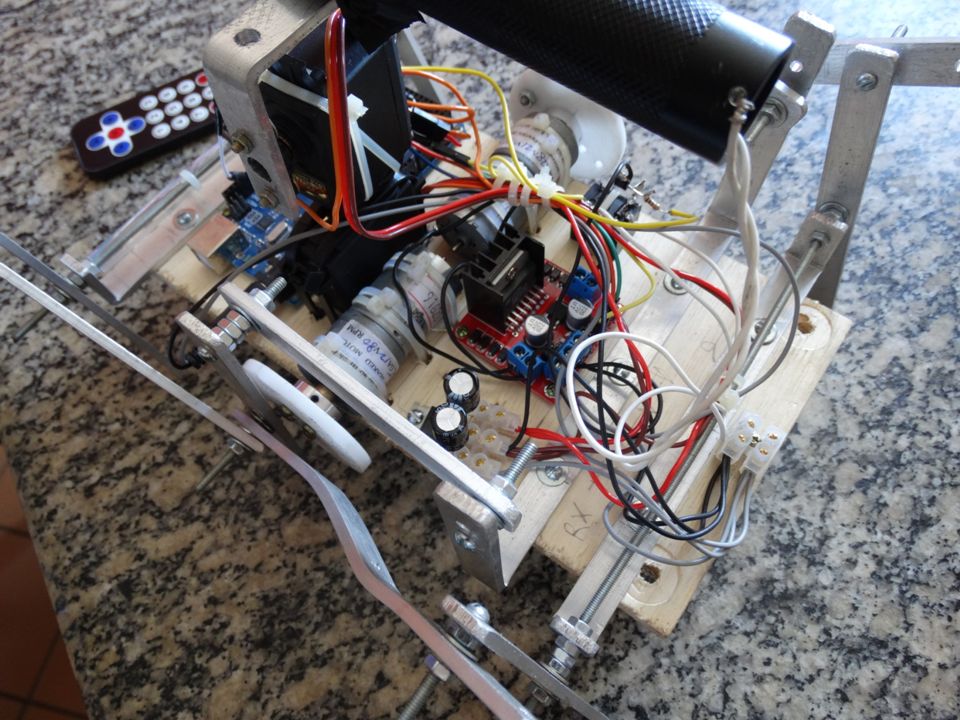
O protótipo utiliza apenas dois motores de corrente contínua que é responsável pelo Movimento de translação. Com ele é possível deslocar-se em várias direções e todo o sistema é controlando por controle remoto infravermelho. Foram adicionados ainda ao projeto 02 servos motores e um laser acoplado Nos mesmos para simular o controle de um canhão que também pode ser Controlado pelo controle remoto. Foi utilizada a plataforma Arduino e todo o sistema é alimentado com tensão de 12 volts.

11
FOTOS DO PROJETO

25
Arduino Motores Sensor Infravermelho

26
Laser

27
Relé

28
Regulador

31
MATERIAIS UTILIZADOS

32
Madeira: 01 x BASE DE MADEIRA 120mm x 240mm x 120mm. Alumínio: Foi usado um perfil de alumínio de 6m de comprimento x 13mm de largura x 3mm de altura, cortado com as seguintes medidas: 06 x Pernas de 120mm; 04 x Hastes de conexão com as quatro pernas externas de 150mm; 02 x Hastes de conexão com as duas pernas centrais de 90mm; 01 x Haste em U de 160mm de comprimento x 20mm de altura para o eixo dianteiro; 01 x Haste em U de 150mm de comprimento x 20mm de altura para o eixo traseiro; 01 x Haste em U de 150mm de comprimento x 80mm de altura para o eixo central; 01 x Haste em L para fixação de Laser de 50mm x 50mm.

33
Rodas: 02 x Rodas de NYLON de 50mm de diâmetro x 4mm. Materiais diversos: Parafusos (36), Porcas (70), Arruelas (48), Fios (10m), Fita isolante e Fitas fixadoras. Placas Controladoras: 01 x Arduino Mega 2560. 01 x Placa Drive ponte H. Fonte de alimentação: 01 x Fonte de alimentação estabilizada de 12 volts com 5A.
, Porcas (70), Arruelas (48), Fios (10m), Fita isolante e Fitas fixadoras. Placas Controladoras: 01 x Arduino Mega x Placa Drive ponte H. Fonte de alimentação: 01 x Fonte de alimentação estabilizada de 12 volts com 5A..")
34
Regulador de tensão: 01 x Regulador LM7805 (Regulador de tensão de 5 volts). Servo motores: 02 x Servos motores digitais MG995 – 15 kg Torque, engrenagens de metal. Motores: 02 x Motores de 12 volts de corrente contínua com redução planetária – até 80 RPM. Iluminador Laser: 01 x Laser Point de 3,7 volts por 4.200mA cor verde de 1.000mW x 532nm, alcance de 8km, bateria recarregável. Relé: 01 x Relé – Utilizado pra ligar e desligar o Laser

35
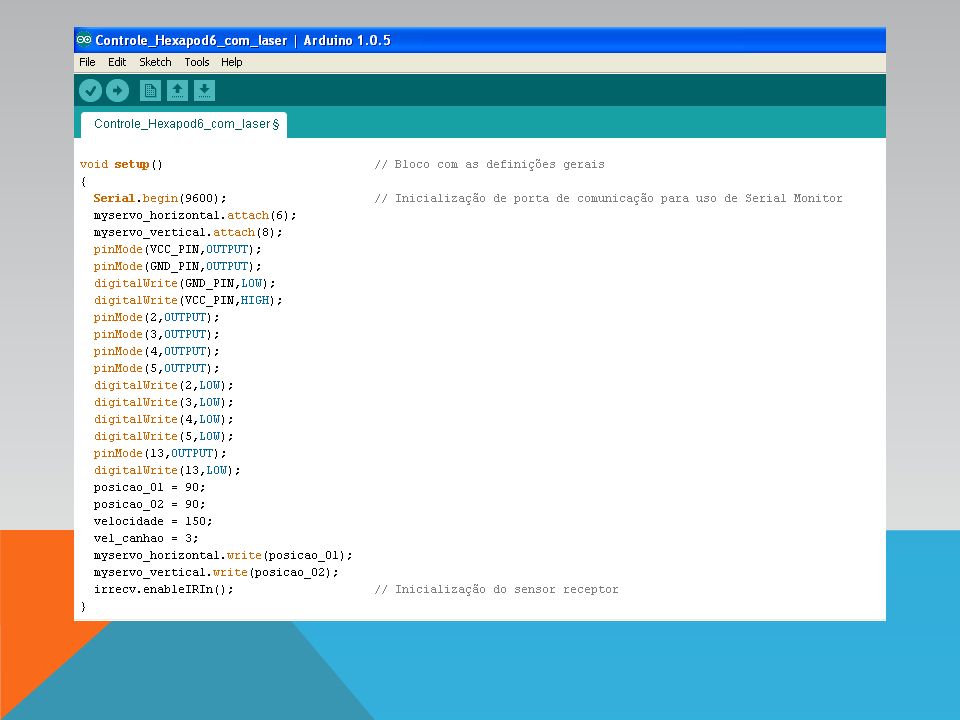
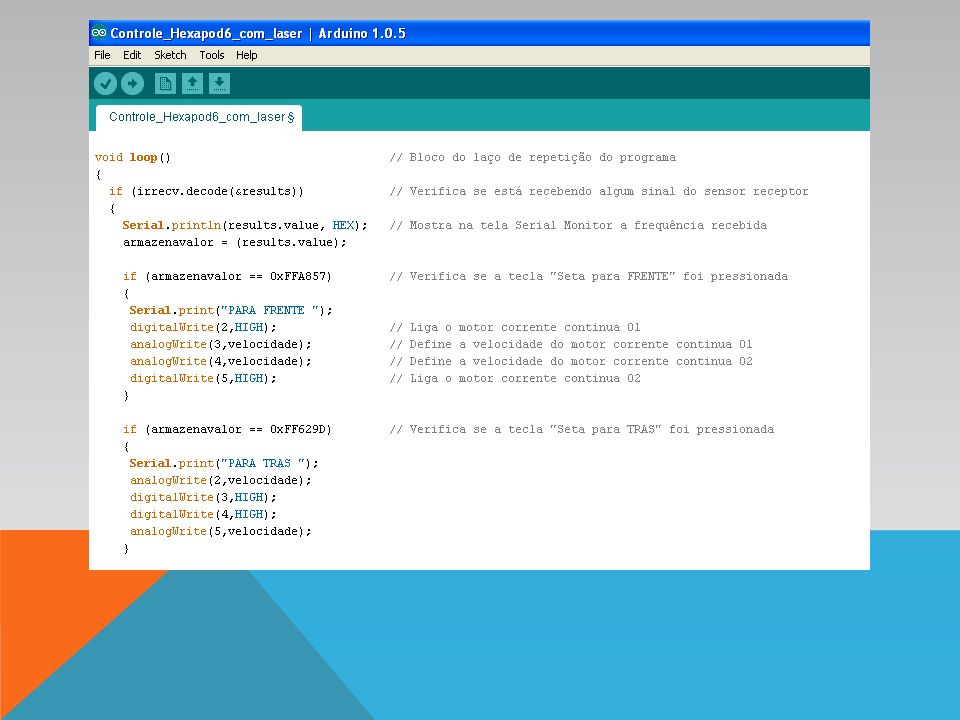
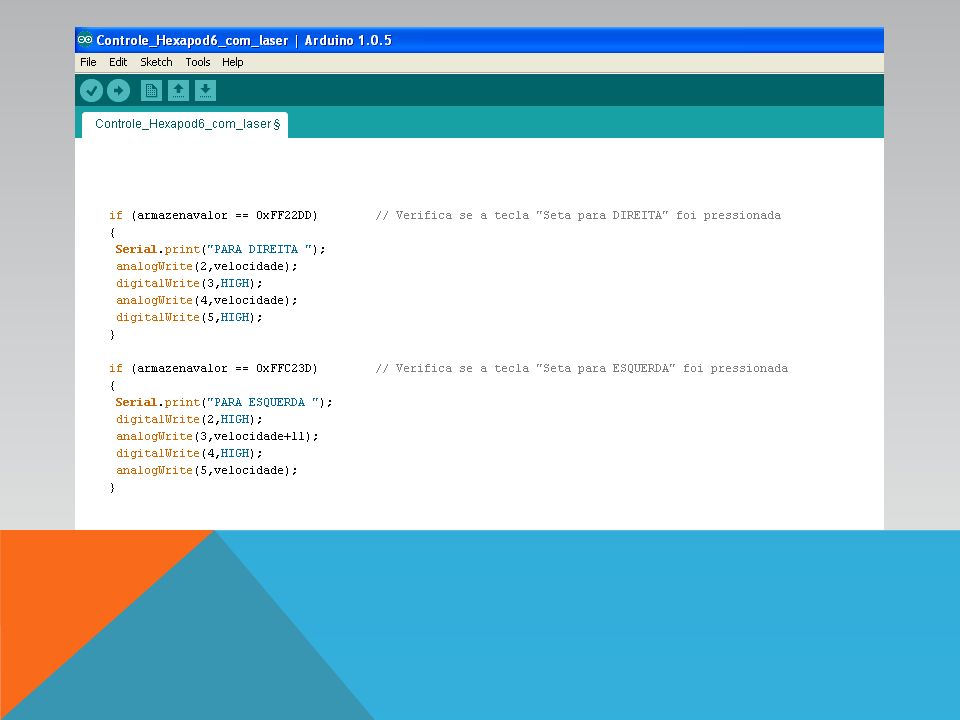
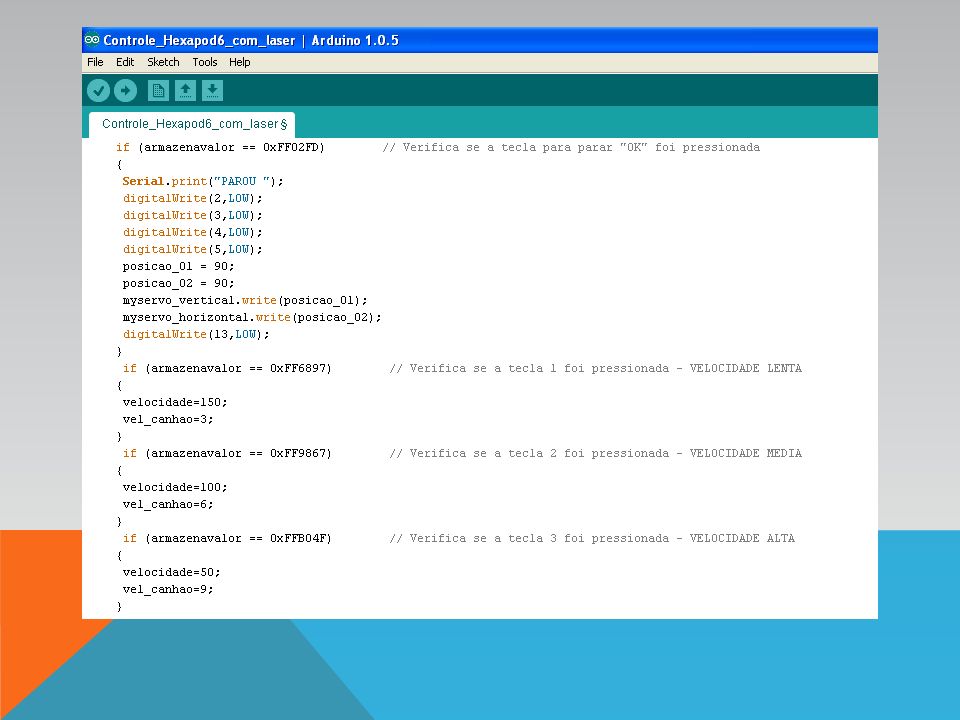
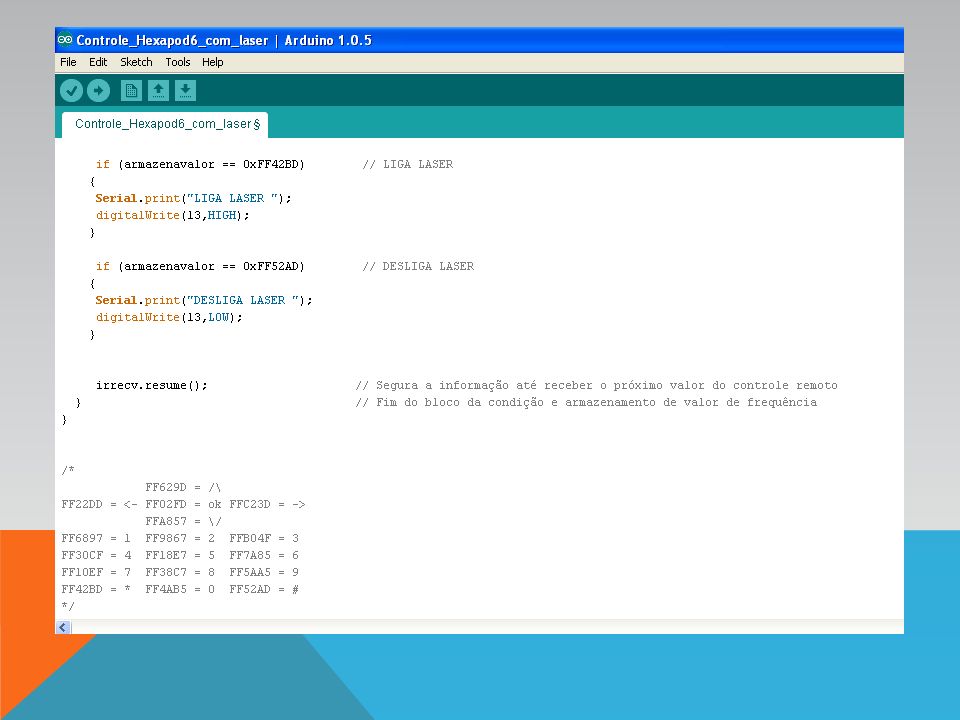
CÓDIGO FONTE 170 LINHAS

44
FIM

Apresentações semelhantes