Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Aula 8 – Parâmetros de Denavit-Hartenberg

2
PARÂMETROS DE DENAVIT-HARTEMBERG
CARACTERIZAÇÃO DO ELO Junta i Junta i+1 Elo i i ai ai: comprimento do elo i: ângulo de torção do elo

3
PARÂMETROS DE DENAVIT-HARTEMBERG
CARACTERIZAÇÃO ENTRE ELOS Junta i Junta i+1 i i+1 Junta i-1 Elo i i-1 Elo i-1 Elo i+1 i ai xi zi-1 di Elo i-2 xi-1 zi i di: distância entre elos adjacentes i : ângulo entre elos adjacentes

4
PARÂMETROS DE DENAVIT-HARTEMBERG
ai: comprimento i: ângulo de torção di: distância i : ângulo do elo entre elos Podem ser definidos a partir de sistemas de coordenadas colocados nas juntas do mecanismo 1.O eixo zi-1 é definido ao longo do movimento da i-ésima junta. 2. O eixo xi é normal ao eixo zi-1 apontando para o próximo elo. 3. O eixo yi-1 completa o sistema de coordenadas através da regra da mão direita. R E G R A S

5
PARÂMETROS DE DENAVIT-HARTEMBERG
Exemplo: Zi-1: ao longo do movimento da i-ésima junta; Xi-1: normal comum entre zi-1 e zi Yi: completa o sistema de coordenadas

6
PARÂMETROS DE DENAVIT-HARTEMBERG
i : ângulo de rotação do eixo xi-1 ao eixo xi, em torno de zi-1 di: distância da origem do (i-1)-ésimo sistema à intercessão dos eixos zi-1 e xi, ao longo de zi-1 ai: menor distância entre zi-1 e zi , ao longo de xi i: ângulo de rotação do eixo zi-1 ao eixo zi ,em torno de xi
-ésimo sistema à intercessão dos eixos zi-1 e xi, ao longo de zi-1. ai: menor distância entre zi-1 e zi , ao longo de xi. i: ângulo de rotação do eixo zi-1 ao eixo zi ,em torno de xi.")
7
PARÂMETROS DE DENAVIT-HARTEMBERG
Exemplo:

9
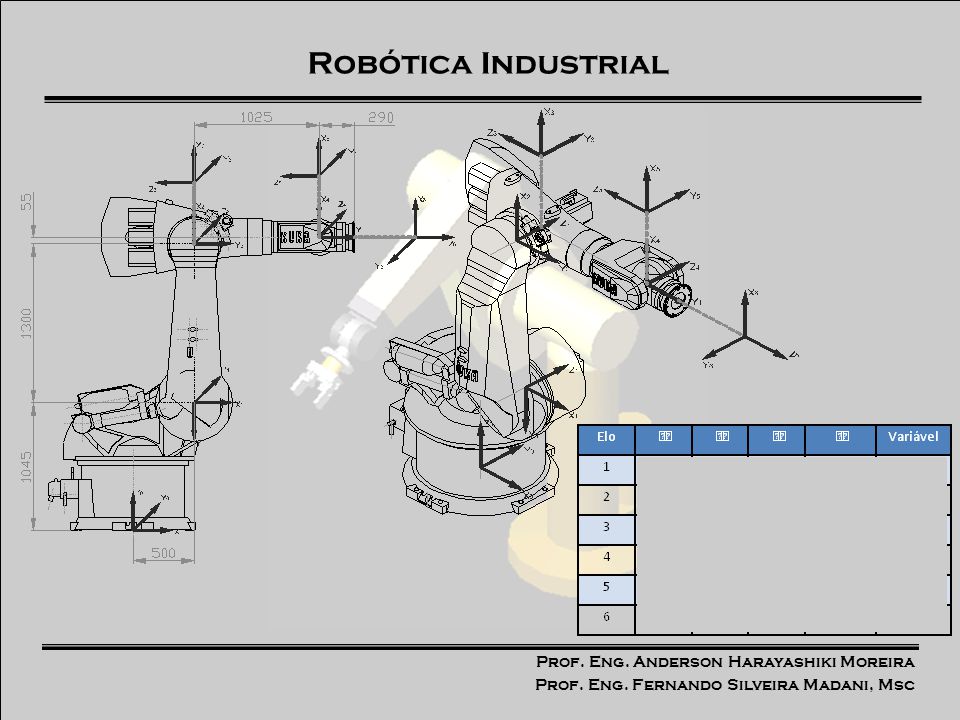
Parâmetros do robô Puma 560
Exemplo: i : ângulo de rotação do eixo xi-1 ao eixo xi, em torno de zi-1 di: distância da origem do (i-1)-ésimo sistema à intercessão dos eixos zi-1 e xi, ao longo de zi-1 ai: menor distância entre zi-1 e zi , ao longo de xi i: ângulo de rotação do eixo zi-1 ao eixo zi ,em torno de xi Parâmetros do robô Puma 560 Junta i qi ai ai(mm) di(mm) Variação da junta 1 90 -90 -160 a 160 2 431,8 -149,09 -225 a 45 3 -20,32 -45 a 225 4 433,07 -110 a 170 5 -100 a 100 6 56,25 -266 a 266
-ésimo sistema à intercessão dos eixos zi-1 e xi, ao longo de zi-1. ai: menor distância entre zi-1 e zi , ao longo de xi. i: ângulo de rotação do eixo zi-1 ao eixo zi ,em torno de xi. Parâmetros do robô Puma 560. Junta i. qi. ai. ai(mm) di(mm) Variação da junta a , , a , a , a a , a 266.")
10
i : ângulo de rotação do eixo xi-1 ao eixo xi, em torno de zi-1
di: distância da origem do (i-1)-ésimo sistema à intercessão dos eixos zi-1 e xi, ao longo de zi-1 ai: menor distância entre zi-1 e zi , ao longo de xi i: ângulo de rotação do eixo zi-1 ao eixo zi ,em torno de xi
-ésimo sistema à intercessão dos eixos zi-1 e xi, ao longo de zi-1. ai: menor distância entre zi-1 e zi , ao longo de xi. i: ângulo de rotação do eixo zi-1 ao eixo zi ,em torno de xi.")
12
MATRIZ DE TRANSFORMAÇÃO HOMOGÊNEA ENTRE DOIS ELOS CONSECUTIVOS
PARÂMETROS DE DENAVIT-HARTEMBERG MATRIZ DE TRANSFORMAÇÃO HOMOGÊNEA ENTRE DOIS ELOS CONSECUTIVOS Tendo definido os parâmetros de D-H para dois elos consecutivos, pode-se calcular a matriz de transformação homogênea entre os sistemas de coordenadas localizados em ambos os elos.

13
MATRIZ DE TRANSFORMAÇÃO HOMOGÊNEA ENTRE DOIS ELOS CONSECUTIVOS: i-1Ai
1. Rotacão de i em torno zi-1 para alinhar os eixos xi-1 e xi 2. Translação de di ao longo do eixo zi-1 para fazer coincidir os eixos xi-1 e xi 3. Translação de ai ao longo do eixo xi para fazer coincidir as origens de ambos os sistemas de coordenadas 4. Rotação de i em torno de xi para fazer coincidir os dois sistemas de coordenadas.

14
MATRIZ DE TRANSFORMAÇÃO HOMOGÊNEA ENTRE DOIS ELOS CONSECUTIVOS: i-1Ai

15
MATRIZ DE TRANSFORMAÇÃO HOMOGÊNEA ENTRE A BASE E A GARRA DE UM ROBÔ
onde:

Apresentações semelhantes