Carregar apresentação
A apresentação está carregando. Por favor, espere

1
Controlabilidade e Observabilidade de Equações Dinâmicas Lineares (C. T. Chen, Capítulo 6)
Sistemas Lineares

2
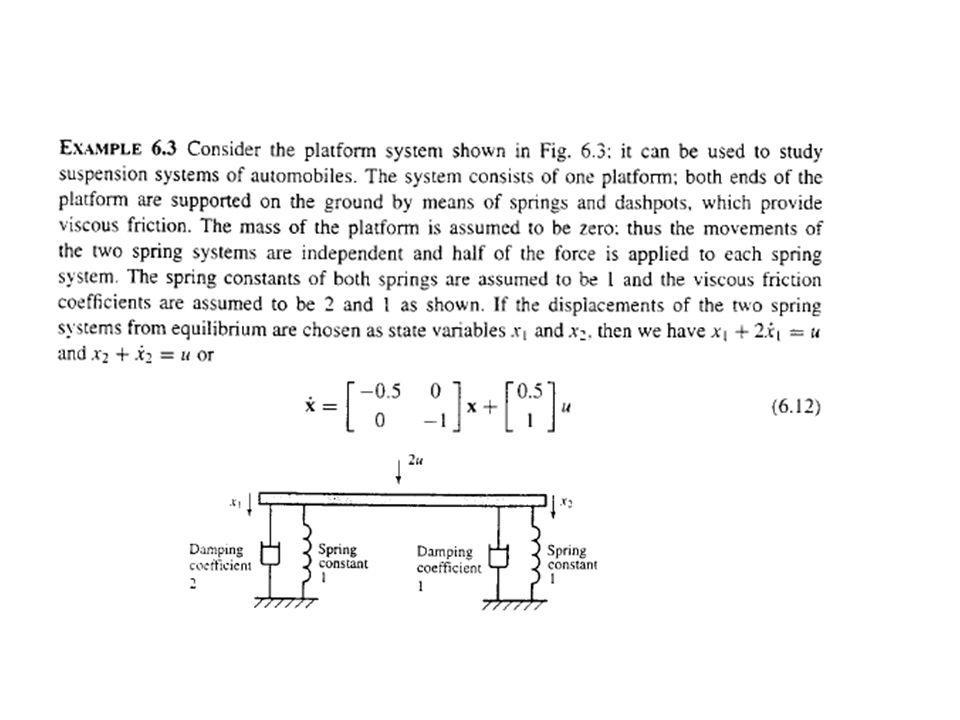
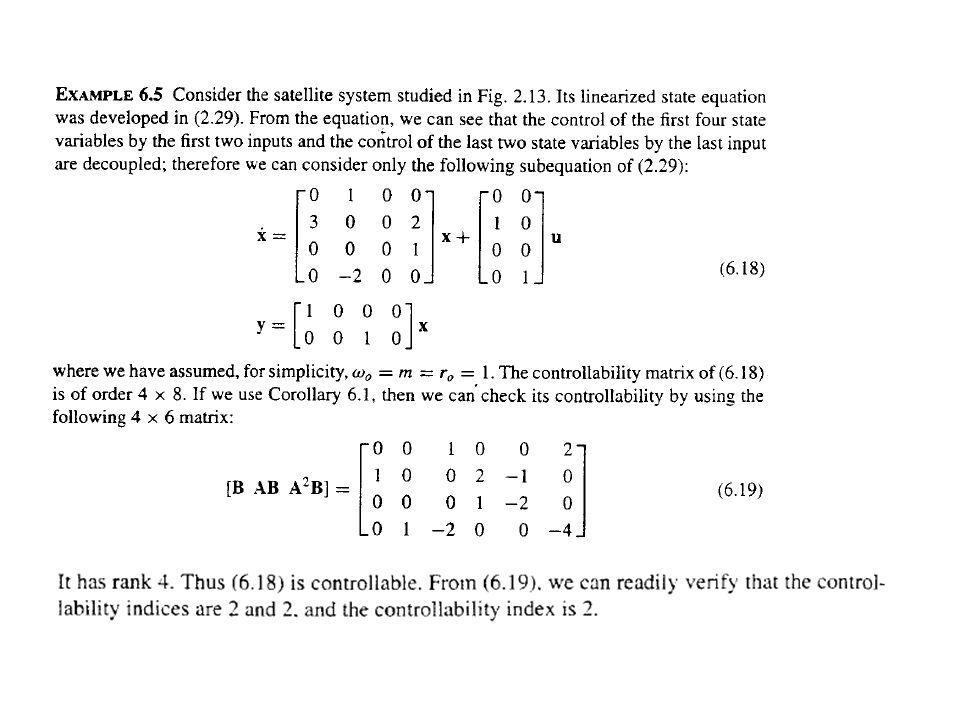
Controlabilidade: equação no espaço de estados pode ser controlada através da entrada (através da entrada u(t) pode-se levar um estado inicial x(to) a um estado x(t1), num tempo finito t1) Observabilidade: estado inicial da equação de estado pode ser observado da saída
 pode-se levar um estado inicial x(to) a um estado x(t1), num tempo finito t1) Observabilidade: estado inicial da equação de estado pode ser observado da saída")
4
Controlabilidade

7
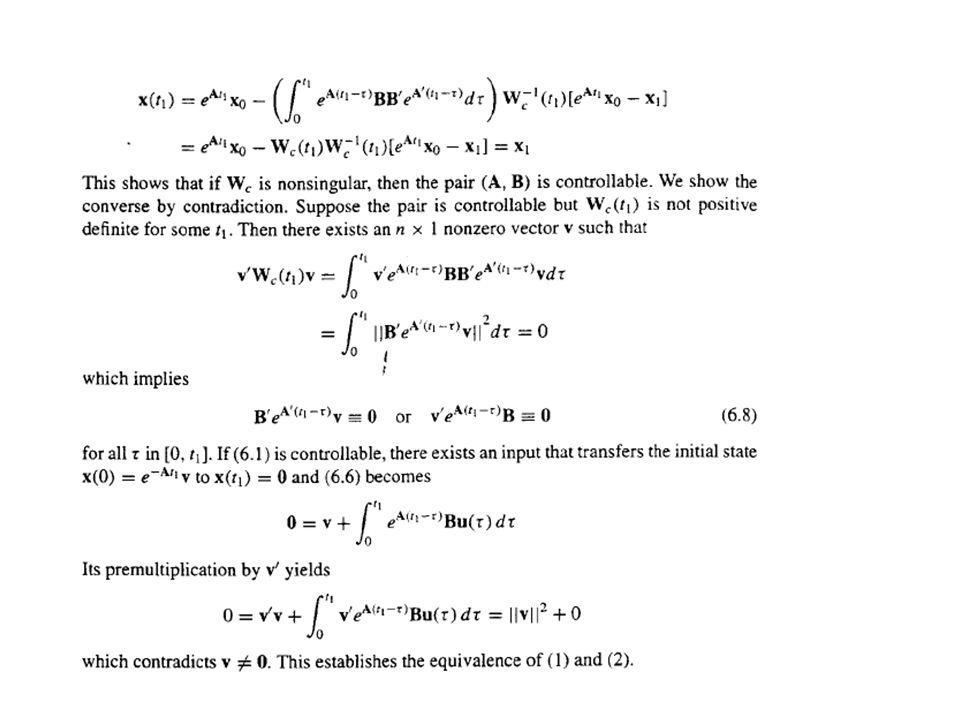
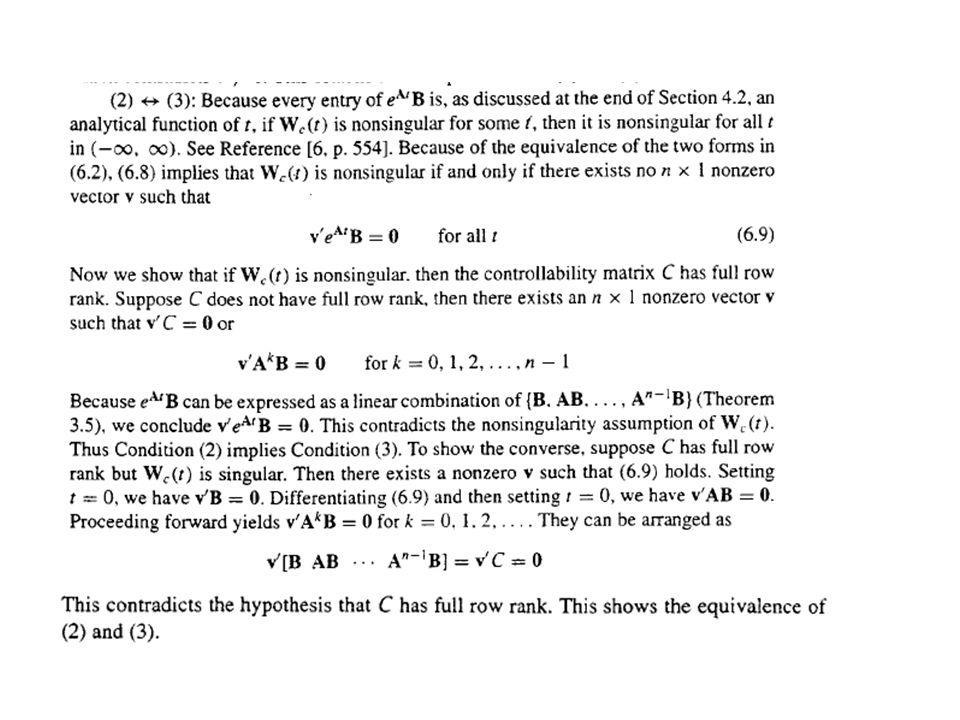
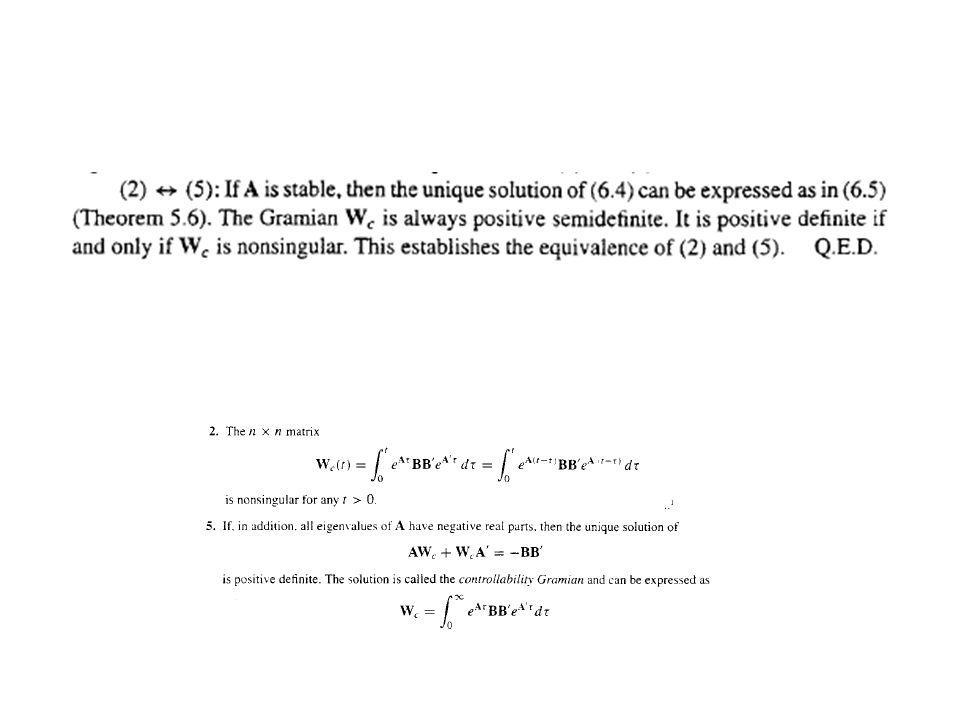
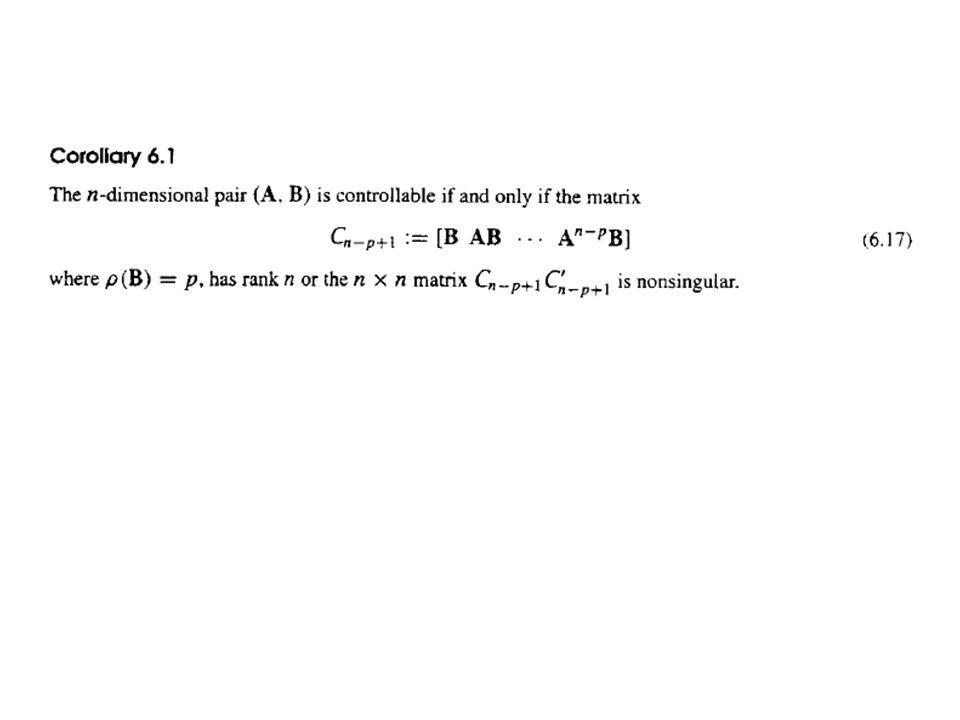
Teorema 6.1

16
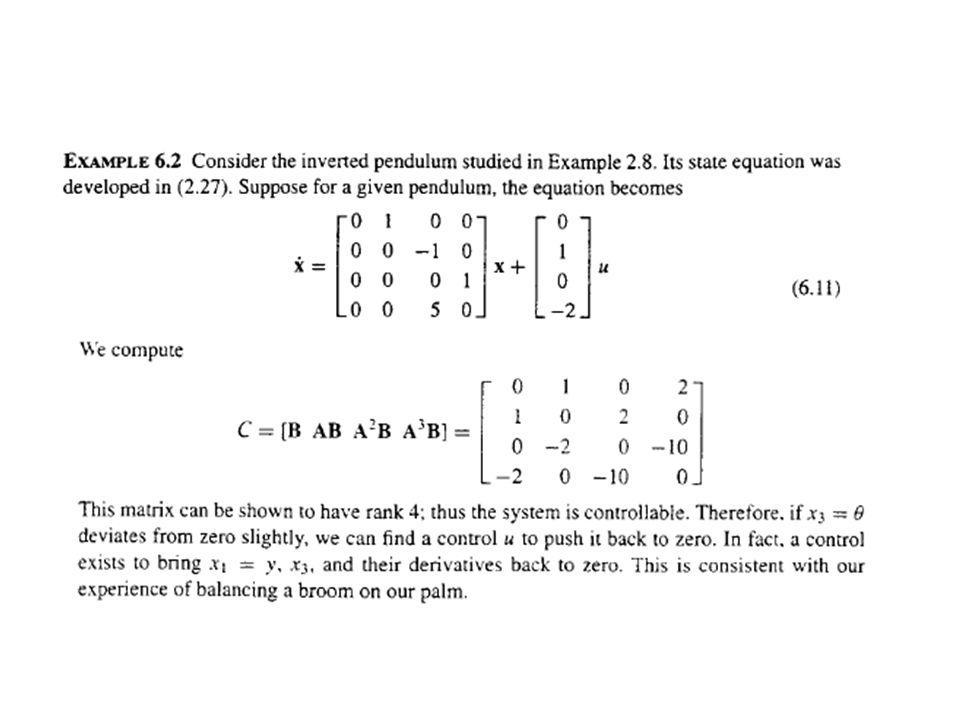
Menor tempo, maior amplitude

21
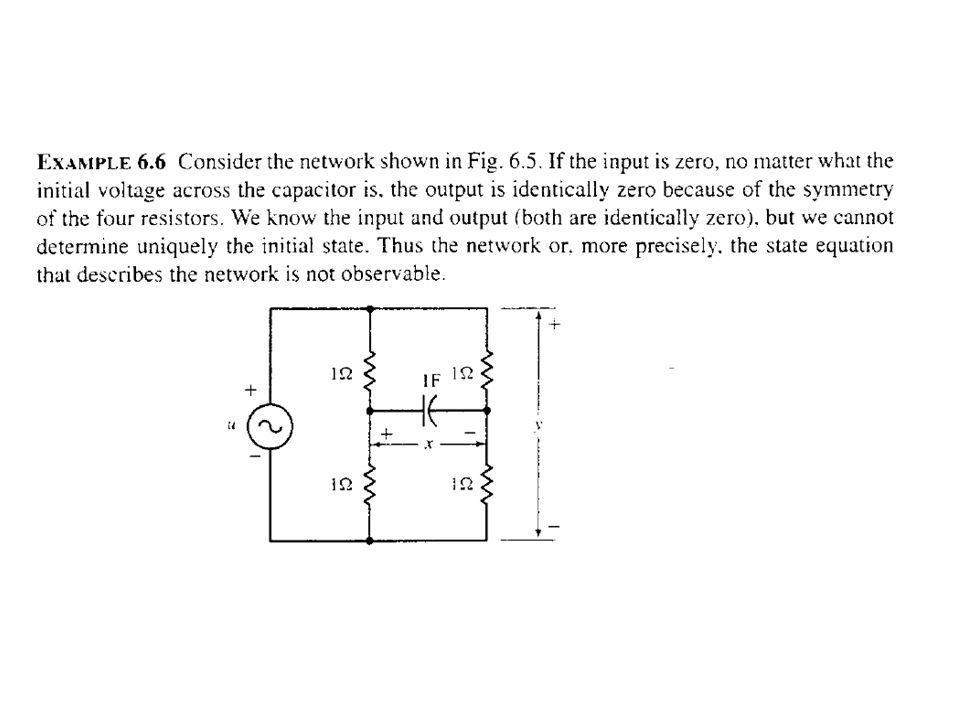
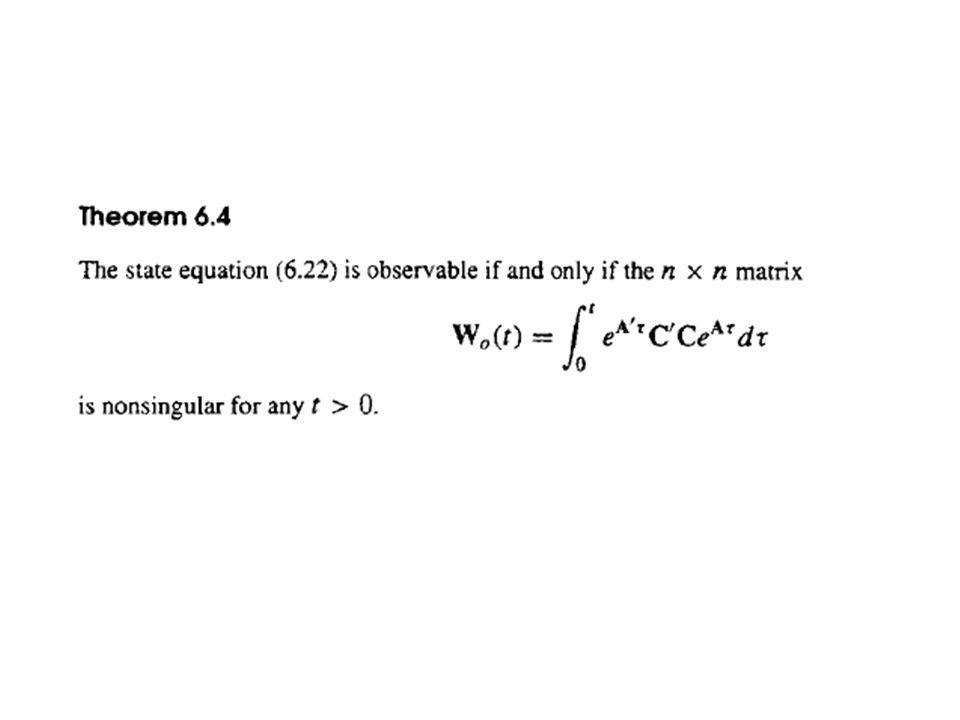
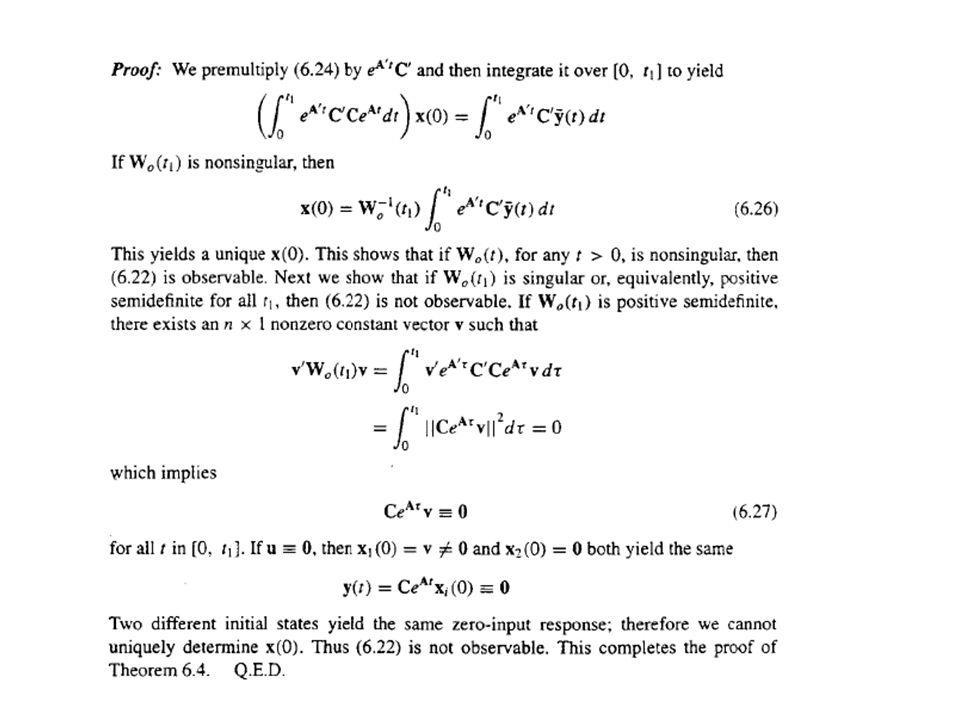
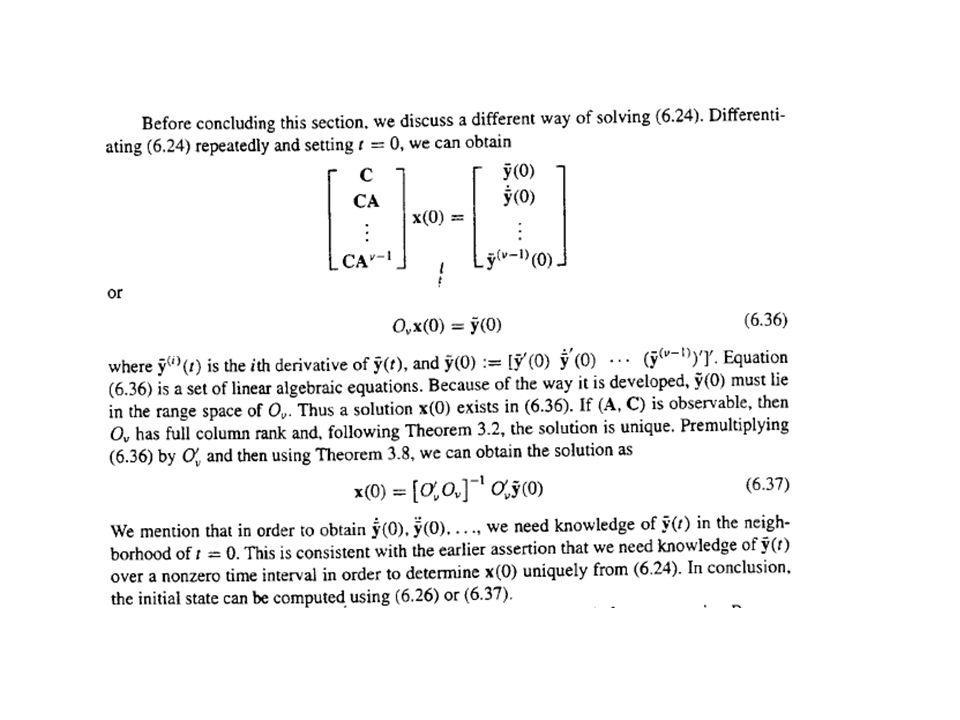
Observabilidade

25
Unicidade de solução

28
Teorema da dualidade

29
Afirmações equivalentes

33
Teorema de decomposição de Kalman

34
Decomposição de Kalman

35
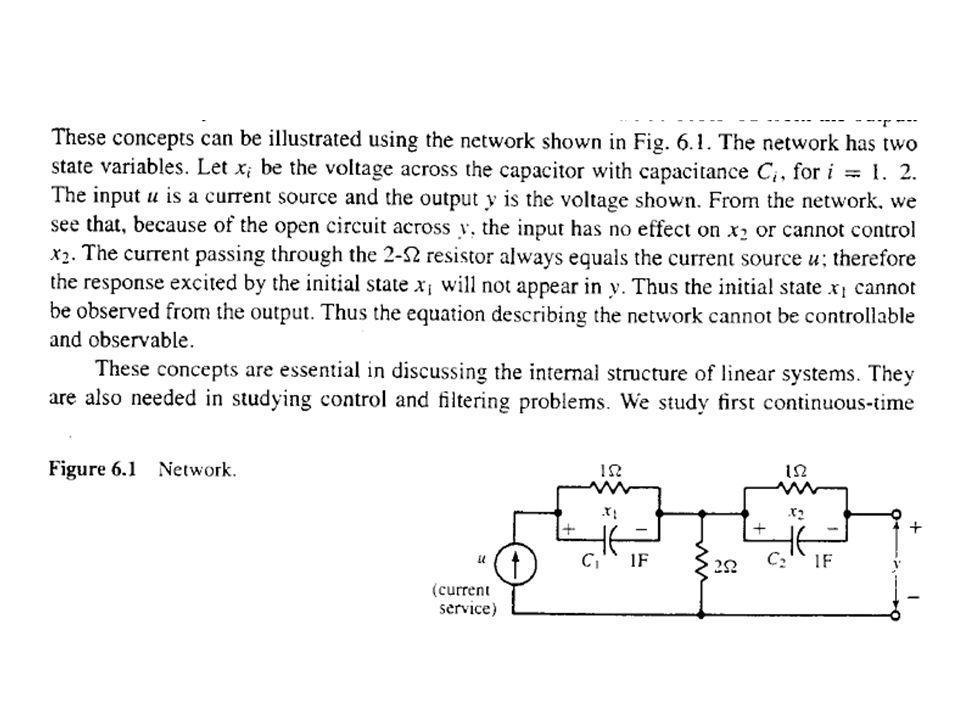
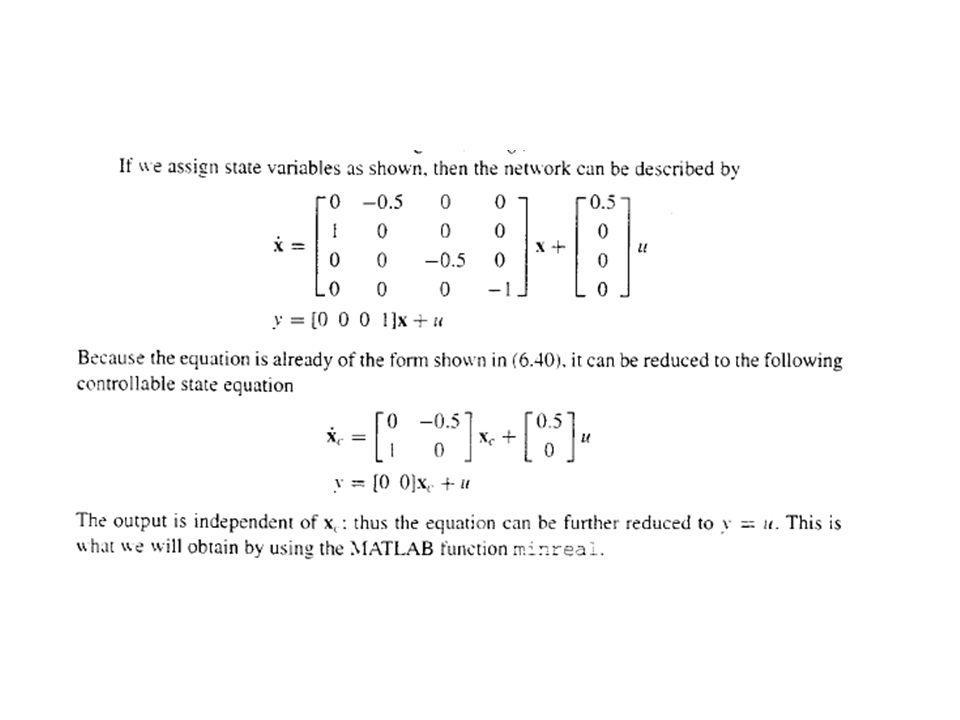
Exemplo 6.9 O efeito de x1 não aparece na saída x2 não é controlável
x3 não é controlável nem observável

37
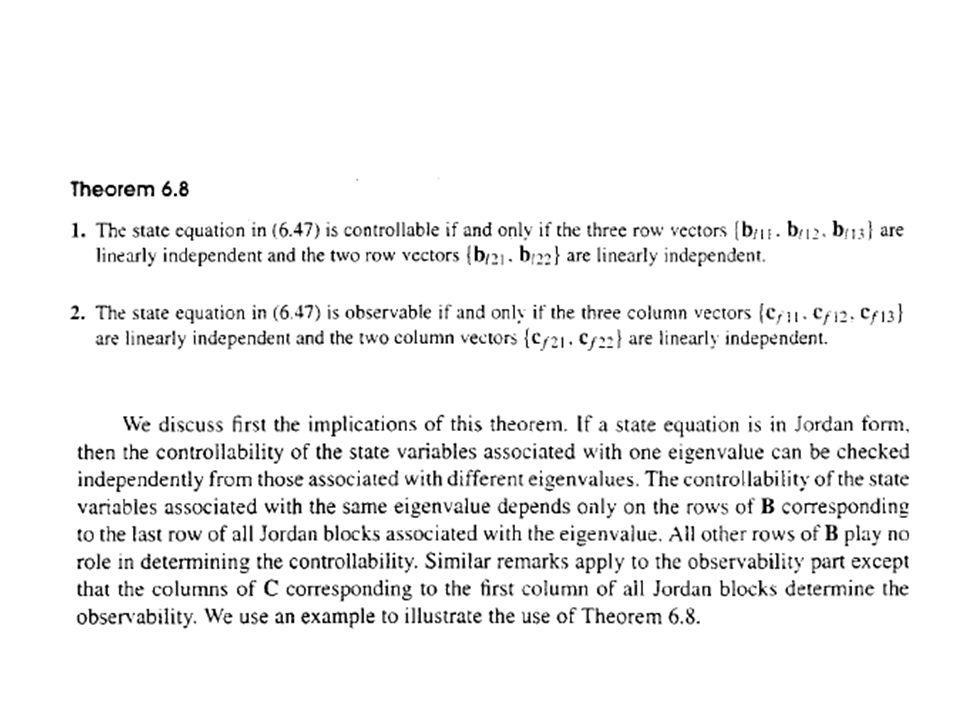
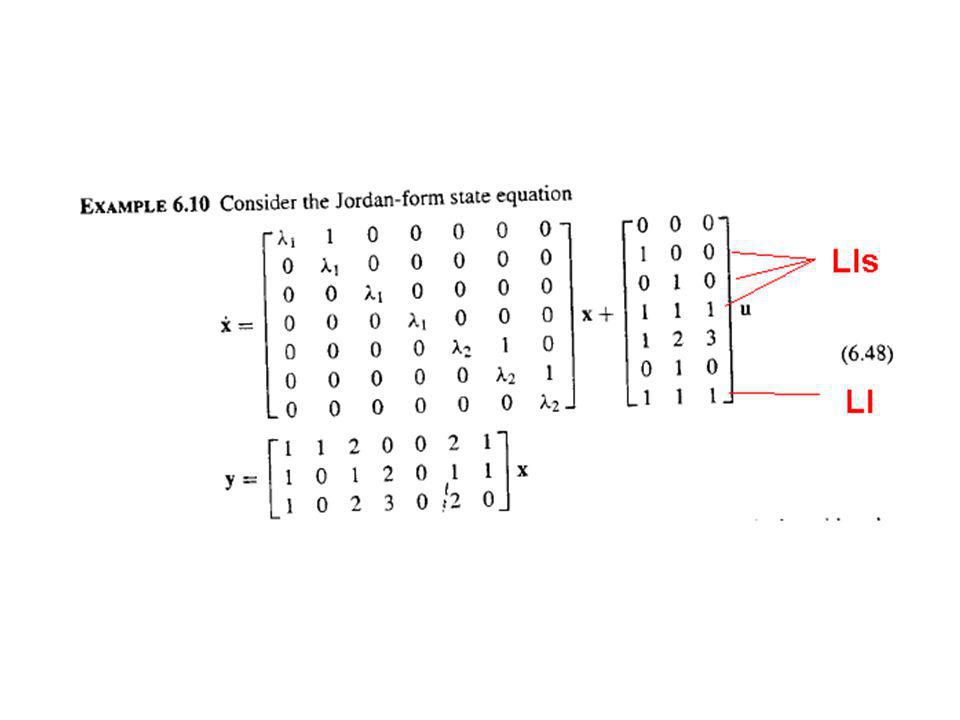
Condições usando forma de Jordan

40
Exemplo a = b =[ ]’ c =[ ]

41
Inv(v)*a*v=J = >> inv(v)*b =[ ]’ C*v= [ ]
![Inv(v)*a*v=J = >> inv(v)*b =[ ]’](http://slideplayer.com.br/slide/1679025/6/images/41/Inv%28v%29%2Aa%2Av%3DJ+%3D+%3E%3E+inv%28v%29%2Ab+%3D%5B+%5D%E2%80%99.jpg "C*v= [ ]")
42
Sys=ss(a,b,c,d) msys=minreal(sys) a = x1 x2 x1 0 1 x2 -2 -3 b = u1 x1 0 x2 1 c = y1 0 1 d = y1 0
 msys=minreal(sys) a = x1 x2 x1 0 1 x b = u1 x1 0 x2 1 c = y1 0 1 d = y1 0")
43
Caso discreto LTV

Apresentações semelhantes






 = f(logic_inputs(t)) Regras Evite.>")

















